Journal of Electrical Engineering
Vol.04 No.02(2016), Article ID:17790,12
pages
10.12677/JEE.2016.42014
Photovoltaic Maximum Power Point Tracking System Based on Bidirectional Cuk Converter
Xiaohe Liu, Rong Ju, Yuanyuan Rong
School of Electrical and Automation Engineering, Nanjing Normal University, Nanjing Jiangsu

Received: May 27th, 2016; accepted: Jun. 13th, 2016; published: Jun. 16th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
The output of photovoltaic (PV) array is influenced by the environmental factors such as irradiation and temperature, if we can make sure that the photovoltaic array operates at the maximum power point, solar energy can get a high utilization rate. This paper introduces a variety of common photovoltaic maximum power point tracking (MPPT) methods, discusses one using of a bidirectional Cuk converter method for MPPT of photovoltaic cells, through the simulation of photovoltaic system based on the Matlab/Simulink platform, the results verify the feasibility of this method.
Keywords:Photovoltaic Array, MPPT, Bidirectional Cuk Converter, Photovoltaic System

基于双向Cuk电路的光伏电池 最大功率点追踪系统
刘小荷,居荣,荣园园
南京师范大学电气与自动化工程学院,江苏 南京

收稿日期:2016年5月27日;录用日期:2016年6月13日;发布日期:2016年6月16日

摘 要
外界环境温度和光照强度等因素直接影响着光伏阵列的输出特性,如果能够使光伏电池一直工作于最大功率输出状态,就可以大大提高太阳能的利用率。本文介绍了当前常用的几种光伏电池最大功率点追踪(maximum power point tracking, MPPT)方法,论述了一种基于双向Cuk变换器电路对光伏电池进行MPPT的方法,利用Matlab/Simulink仿真平台对光伏发电系统的整体结构进行了仿真,仿真结果表明了该方法的可行性。
关键词 :光伏阵列,MPPT,双向Cuk变换器,光伏发电系统

1. 引言
随着经济的发展,解决能源危机问题迫在眉睫,可再生能源发电应运而生,太阳能、风能等常见新能源发电得到了人们的重视。由于太阳能具有取之不尽、用之不竭、无污染、无噪音等优点,成为目前最有发展前景的可再生能源发电项目之一 [1] 。太阳能光热发电和太阳能光伏发电是众多太阳能发电方式中最常见、最典型的两种发电方式。同光热发电相比,光伏发电系统具有体积小、结构简单、可靠性高、寿命长和易维护等优点,近些年来得到了迅速发展。按照制作材料不同,光伏电池可以分为硅型、化合物型、有机半导体型等,目前应用最为广泛的是硅型光伏电池,硅型光伏电池又可以分为单晶硅、多晶硅及非晶硅薄膜型等 [2] 。本文主要针对硅型光伏电池进行数学建模和模型构建。
光伏电池将太阳能转换为电能的效率较低且价格比较昂贵,并且初期投入较大,如何高效的利用太阳能是光伏发电的重点研究课题之一,为了能够最大限度的利用太阳能,提高其转换效率,就必须采取一定的控制策略用来保证光伏电池常工作于最大功率输出的状态,因此对光伏电池进行最大功率点追踪研究具有十分大的意义。
本文分析了光伏电池的数学模型,搭建了其工程应用模型,介绍了多种最大功率点追踪的方法,最终以电导增量法为基础,利用双向Cuk变换器电路对光伏电池进行最大功率点追踪,基于Matlab/Simulink仿真环境,对保持外界温度不变、改变光照强度和保持光照强度不变、改变外界温度两种情况,分别对所建模型进行仿真,对MPPT动态响应曲线做了分析。
2. 光伏电池数学模型
光伏发电系统主要由光伏板、控制器及逆变器3个部分组成,其中光伏电池是光伏系统中最基础的电能产生单元,其发电原理是光生伏特效应,它具有类似于二极管PN结的结构,当有光照射到光伏电池表面的时候,PN结两端会产生电压,但是独立的光伏电池输出电压及输出电流都很低,功率也十分小,为此需要将大量的光伏电池串并联后构成光伏阵列,进而获取较高的输出电压及较大的输出功率,才能够应用于光伏发电系统中 [3] 。光伏发电系统的实际电源一般都是指光伏阵列,它是一种直流电源。光伏电池的等效电路如图1所示。
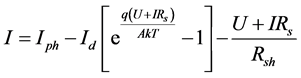
光伏电池的伏安特性方程为:
 (1)
(1)
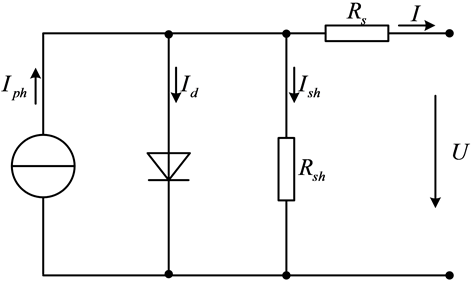
Figure 1. Equivalent circuit of PV cells
图1. 光伏电池的等效电路
图1中二极管用来表示PN结特性;公式(1)中的I和U分别为光伏电池输出电流和输出电压; 和
和 分别为等效串联阻抗和并联阻抗;T 为电池温度;q是电子的电荷量,为
分别为等效串联阻抗和并联阻抗;T 为电池温度;q是电子的电荷量,为 ;A为二极管特性因子;k是波尔兹曼常数,为
;A为二极管特性因子;k是波尔兹曼常数,为 ;
; 和
和 分别为光生电流和二极管的反向饱和电流,
分别为光生电流和二极管的反向饱和电流, 和
和 是随环境变化的量,需根据具体的光照强度和温度确定。光伏电池的短路电流主要受光照强度变化影响,其开路电压主要受外界温度变化影响 [4] 。
是随环境变化的量,需根据具体的光照强度和温度确定。光伏电池的短路电流主要受光照强度变化影响,其开路电压主要受外界温度变化影响 [4] 。
光伏电池的理论模型一般只应用于理论分析,因为一些相关参数难以确定,很难进行工程应用,工程应用的数学模型往往是对式(1)进行简化的结果:
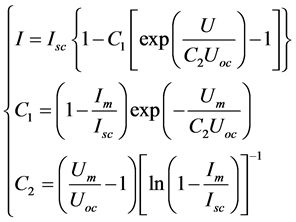 (2)
(2)
式(2)中的重要参数由供应厂商提供,包括标准光照强度 ,标准环境温度
,标准环境温度 ,
, (短路电流),
(短路电流), (最大功率点电流),
(最大功率点电流), (开路电压),
(开路电压), (最大功率点电压)。随着外界环境的变化,需要对式(2)中参数进行修正,推算出当前环境下的光伏电池参数
(最大功率点电压)。随着外界环境的变化,需要对式(2)中参数进行修正,推算出当前环境下的光伏电池参数 ,
, ,
, ,
, [5] 。
[5] 。
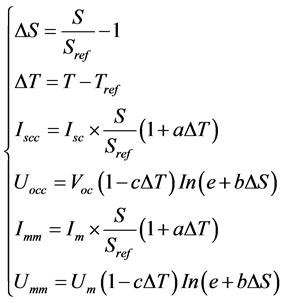 (3)
(3)
其中 和
和 为标准温度和光照强度,T和S为实际温度和光照强度,a、b、c为常数:
为标准温度和光照强度,T和S为实际温度和光照强度,a、b、c为常数: 、
、 、
、 。在忽略组件差异和线损的情况下,独立的太阳能电池通过串并联构成光伏阵列,其等效电路如图2所示。
。在忽略组件差异和线损的情况下,独立的太阳能电池通过串并联构成光伏阵列,其等效电路如图2所示。
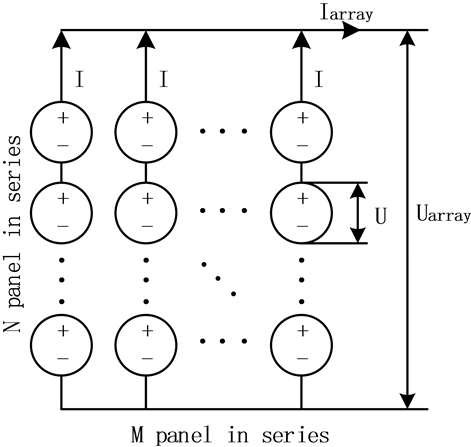
Figure 2. Equivalent circuit of PV-array
图2. 光伏阵列等效电路
串并联后的光伏阵列由M行、N列独立光伏电池构成,简化起见,本文光伏发电系统仿真模型的M和N的值都取1。光伏阵列工作电压及电流计算公式如下:
 (4)
(4)
式中 、
、 为光伏阵列工作电压和工作电流,
为光伏阵列工作电压和工作电流, 、
、 为光伏阵列最大功率点时的电压和电流。
为光伏阵列最大功率点时的电压和电流。
3. 最大功率点追踪
光伏电池的输出电压及输出功率在外界温度和光强的影响下,会产生非线性变化,但在某个确定的温度和光照强度下,光伏电池只有工作于某个输出电压值Um下,其输出功率才能够达到最大值,这个工作点即为最大功率点,我们进行最大功率点追踪控制,就是根据光伏阵列的伏安特性,利用一些控制方法使光伏阵列工作于最大功率输出的状态,最大限度的利用太阳辐射。当前,MPPT的控制方法有很多种,常用的有:恒定电压控制法(constant voltage tracking)、扰动观测法(perturbation and observation method)、增量电导法(incremental conductance method)、模糊逻辑控制法(fuzzy logic control)、电流扫描法(current sweep)、神经网络控制法(neural network control)等 [6] 。
3.1. 恒定电压控制法
当外界温度不变时,光伏电池的输出功率会随着光照强度的变大而变大,但是最大功率点的电压几乎为同一个固定值,所以,恒定电压控制法的思路是:固定光伏阵列的输出电压于Um(最大功率点输出电压)处,使光伏阵列近似保持在最大功率点的工作状态下 [7] 。恒定电压控制法简单,易于实现,并且可靠性高,光伏发电系统不会出现振荡现象,有比较好的稳定性。但对于早晚及四季温差变化较大的地区,该控制法的精度较低,必须有及时的人工干预才能良好的运行工作。近些年MPPT技术不断更新完善,在该技术不断的数字化、微处理器化的冲击下,恒定电压控制法在逐渐地被其他方法所替代。
3.2. 扰动观测法
扰动观测法是目前研究较多、实现MPPT较常用的方法之一,其控制原理是:给输出电压增加一个扰动,通过公式P = UI可以计算出扰动前后两个输出功率的值,若增加扰动后的输出功率有所增加,则说明该扰动有利于光伏系统达到最大功率点,进而下一时刻向相同的方向继续对光伏阵列的输出电压进行扰动处理;反之,则说明该扰动不利于光伏系统达到最大功率点,下一时刻则向相反的方向扰动 [8] 。扰动观测法具有被测参数较少,思路简单,便于实现的优点,但在最大功率点处振荡现象不可避免,震荡结果就会导致部分功率损失,所以,扰动步长的取值非常敏感,在变化迅速的外界环境下,虽然较小的步长可以减小最大功率点处的振荡,但同时却降低了跟踪速度;此外,程序有时也会发生“误判”的现象。
3.3. 电导增量法
本文针对电导增量法进行了建模仿真,以下是电导增量法的算法依据分析。
光伏阵列输出功率P和其输出电流I、输出电压U的关系如下:
 (5)
(5)
由图3中光伏电池P-U曲线可知,在最大功率点处,满足以下条件:
 (6)
(6)
离散化后,根据下列判据获得最大功率点:
 (7)
(7)
其中
 (8)
(8)
 (9)
(9)
具体运算过程为:首先假设太阳能阵列工作在某点(初值电压电流均可设为0),然后采集太阳能电池的电压电流,通过式(7)、(8)、(9)判断 的大小,当
的大小,当 时,此时光伏阵列工作于最大功率点的左侧,应该适量增大输出电压;当
时,此时光伏阵列工作于最大功率点的左侧,应该适量增大输出电压;当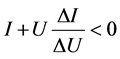 时,此时光伏阵列工作于最大功率点的右侧,应适量减小输出电压 [9] 。最后本次采集的电压、电流值作为新的电压、电流的参考值,其算法流程图如图4所示。
时,此时光伏阵列工作于最大功率点的右侧,应适量减小输出电压 [9] 。最后本次采集的电压、电流值作为新的电压、电流的参考值,其算法流程图如图4所示。
由于光伏电池的P-U曲线是单峰曲线,这个属性并不会随着外界环境及时间的变化而改变,所以采用电导增量法进行MPPT时并没有原理性误差,该方法具有控制效果好、稳定性高的优点,是一个比较理想的MPPT跟踪方法,但电导增量法在实际运行情况下有较多的运算判断,算法比较复杂,因此对控制系统的性能要求较高。
4. 用于MPPT的双向Cuk变换器电路原理
典型的光伏发电系统中直流变换电路涉及直流斩波器和开关型DC/DC变流器。降压型电路(Buck)、升压型电路(Boost)、升/降压型电路(Buck-Boost)和丘克电路(Cuk)构成四种基本的直流斩波电路 [10] 。开关型DC/DC变流器通常应用于光伏发电系统的电压变换单元,譬如应用于直流光伏输电线路等。直流斩波器又分为带电气隔离和不带电气隔离两种,由于非隔离型斩波器结构简单、易于控制,广泛应用于独立光伏发电系统。
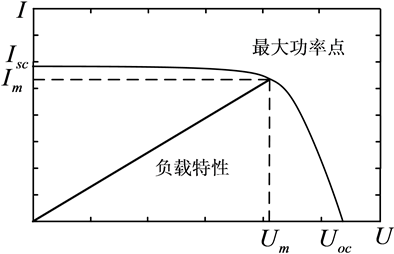
Figure 3. Typical P-U and I-U curve of PV
图3. 光伏电池典型P-U曲线和I-U曲线
Figure 4. Incremental conductance method flow chart
图4. 增量电导法算法流程图
Buck斩波电路间断地从电源取电,即输入电流不连续,导致光伏电池的输出电流也是不连续的,光伏发电系统就会损失一些能量 [11] 。Buck-Boost斩波电路电流波动过大,Cuk斩波电路很好的克服了这个缺点,同时能够实现MPPT和升降压作用,并且满足负载变化比较大的系统 [12] 。本文在单向Cuk变换器的电路基础上,通过将电路中的二极管和开关元件分别并联开关元件及反向二极管,使电路的能量能够双向流动,构成双向Cuk变换器,其拓扑结构如图5所示。
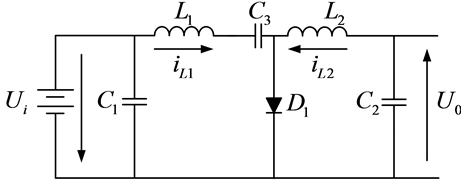
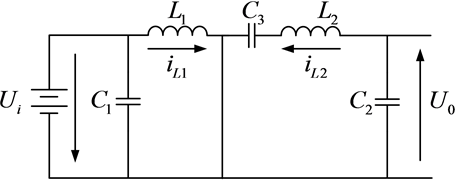
双向Cuk变换器的正向工作电路如图6(a)和图6(b)所示。此时开关管S1处于工作状态,开关管S2
截止,电路对电容C3的容量有很大要求,当电路稳态工作时,C3的电压基本保持不变。开关管S1导通,电池组向电感L1充电,电容C3经电感L2和负载放电;当S1关断时,电池组及电感L1向电容C3充电,电感L2向负载供电。
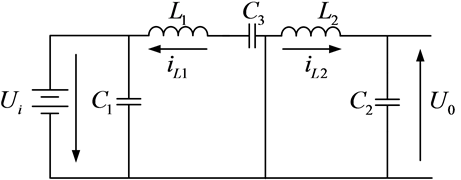
双向Cuk变换器的反向工作电路如图7(a)和图7(b)所示。开关管S1截止,S2工作。当S2导通时,负载向电感L2充电,电容C3经电池组和电感L1放电,当S2截止时,电感L2和负载向电容C3充电,电感L1向电池组供电。
5. 系统仿真
5.1. 仿真建模
本文采用双向Cuk斩波电路作为光伏系统的直流变换电路,需要为同步整流器提供互补的触发信号,PWM模块的仿真模型如图8所示。PWM1为主控开关管的触发信号,PWM2为被控开关管的触发信号,两种信号是互补的反向信号。首先,采用三角波与参考电压相减,相减后的结果信号用来控制选择输出模块输出0或者1,然后通过改变参考电压的幅值来改变占空比。遇到紧急情况时,Ve信号可以及时关断PWM1和PWM2的信号。
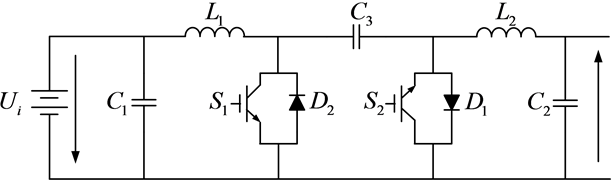
Figure 5. Bidirectional Cuk converter topological structure diagram
图5. 双向Cuk变换器拓扑结构图
 (a) (b)
(a) (b)
Figure 6. (a) S1 conducting operational mode; (b) S1 closing operational mode
图6. (a) S1导通时工作模式;(b) S1关断时工作模式

 (a) (b)
(a) (b)
Figure 7. (a) S2 conducting operational mode; (b) S2 closing operational mode
图7. (a) S2导通时工作模式;(b) S2关断时工作模式
利用Matlab/Simulink软件平台建立基于双向Cuk电路的最大功率点追踪控制器模型,并且与PV模型连接,对此控制系统进行模拟仿真,验证了其可行性,仿真结构模型如图9所示,由图可知,在光伏阵列和负载之间通过双向Cuk电路,可以改变占空比来改变光伏阵列的工作电压。
图9中两个Mosfet选用IRFB3206型,其参数为:Ron = 2.4 mΩ、二极管正向压降Vf = 1.3V,二极管内阻Rd = 0.0173 mΩ;仿真系统Cuk电路单元参数为:L1 = 650 uH、L2 = 400 uH、C1 = 700 uF、C2 = 300 uF、C3 = 300 uF,负载RL = 1 Ω。
5.2. 仿真分析
图10是图9中scope1对应的波形,从图中可知PWM1和PWM2为互补信号,用于Cuk斩波电路中两个开关管的触发信号。
图11和图12分别为本文所搭建的光伏模型随着光照幅度和温度变化时的实际I-U曲线和P-U曲线。
将光伏模块和最大功率点追踪模块连接起来,对整个系统进行仿真。外界温度不变,改变光照强度的仿真系统参考条件为:Tb = 25˚C,在0.1 S、0.2 S、0.3 S时改变光照强度,采用阶梯参数仿真,数据为1000 W/m2、800 W/m2、600 W/m2。在光照强度发生变化的情况下,光伏发电模型搜索跟踪最大功率点
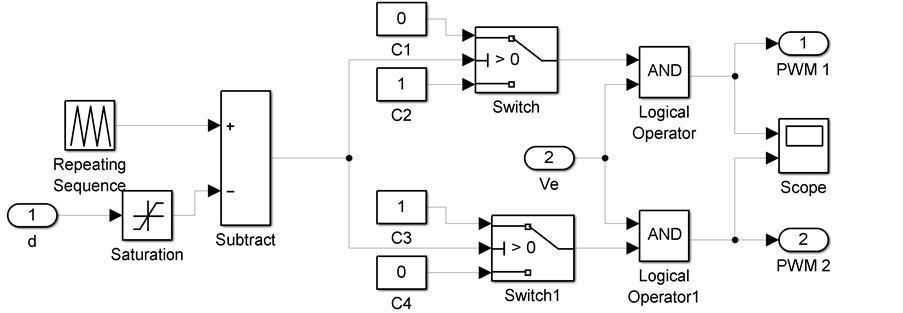
Figure 8. PWM signal generator simulation model
图8. PWM信号发生模块Simulink仿真模型
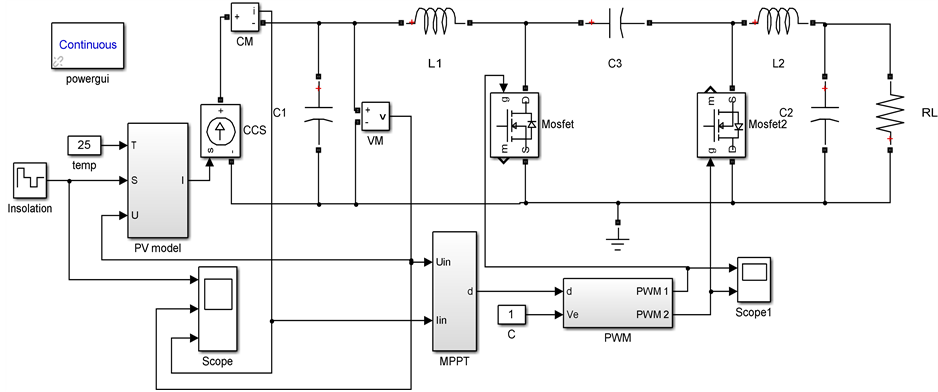
Figure 9. MPPT control system based on Bidirectional Cuk converter simulation model
图9. 基于双向Cuk变换器的MPPT控制系统Simulink模型
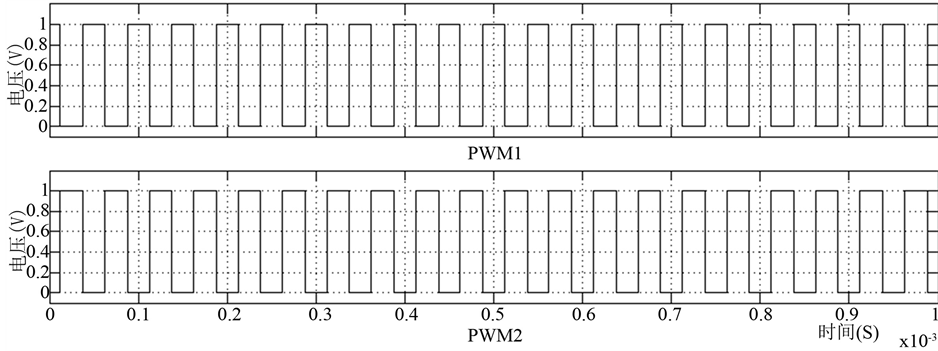
Figure 10. PWM oscillogram
图10. PWM波形
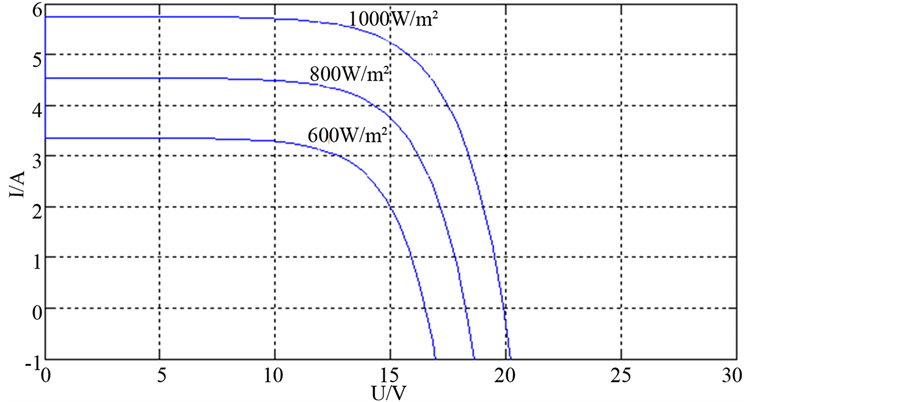
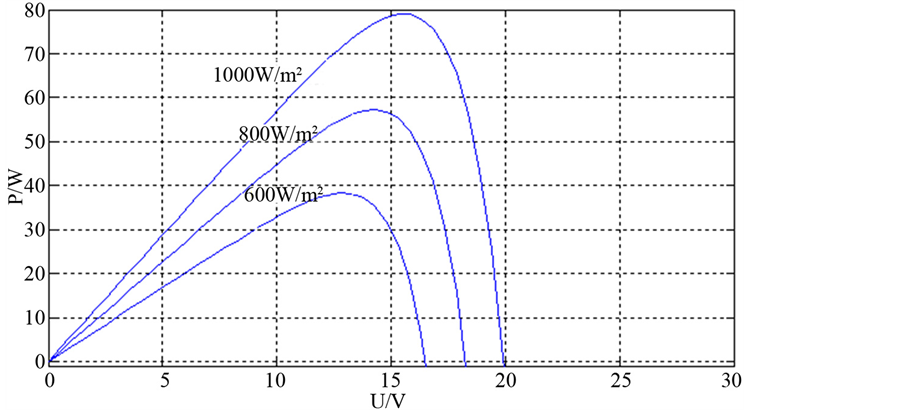
Figure 11. I-U and P-U curve of PV (T = 25˚C)
图11. 光伏电池I-U曲线和P-U曲线(T = 25℃)
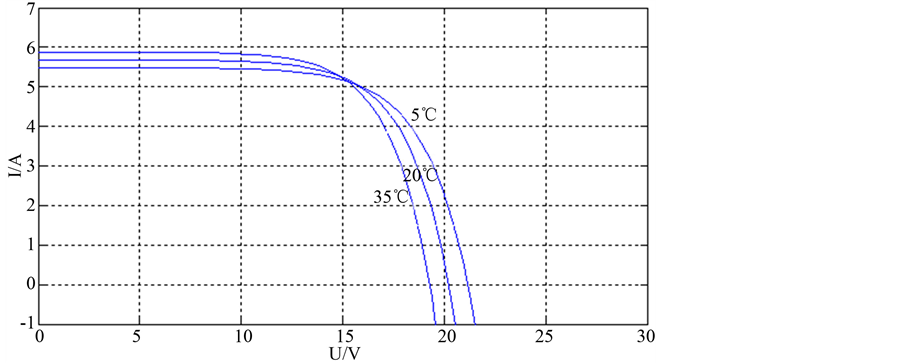
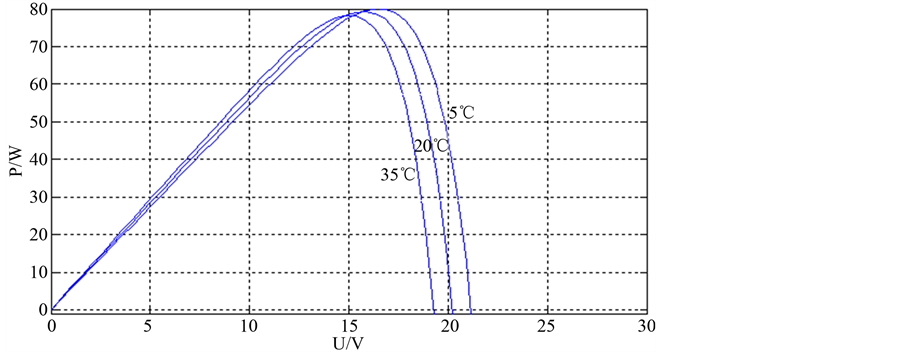
Figure 12. I-U and P-U curve of PV (S = 1000 W/m2)
图12. 光伏电池I-U曲线和P-U曲线(S = 1000 W/m2)
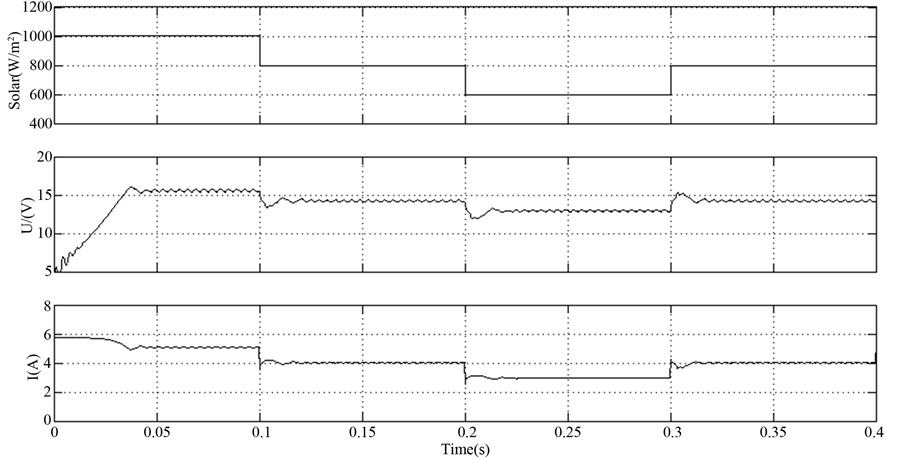
Figure 13. Output voltage and current simulation waveform of PV system under different light intensity
图13. 不同光照强度下PV系统输出电压电流的波动仿真
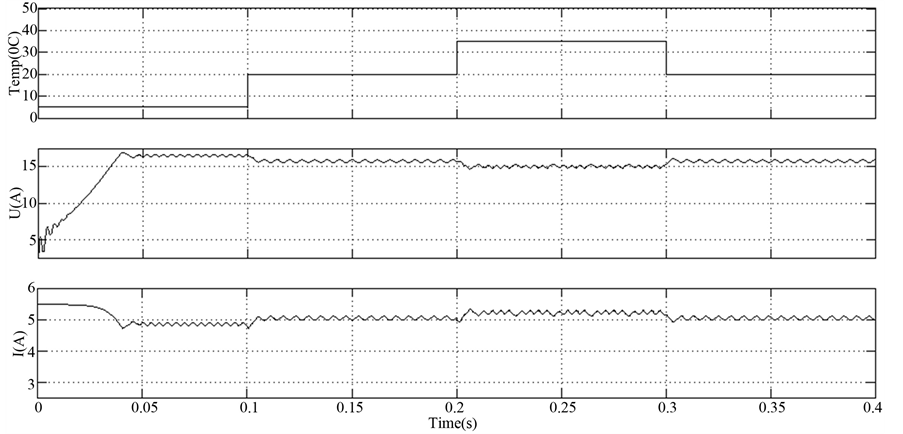
Figure 14. Output voltage and current simulation waveform of PV system under different temperature
图14. 不同温度下PV系统输出电压电流的波动仿真
的过程仿真如图13所示。
光照强度不变,改变温度的仿真系统参考条件为:光照强度为 ,在0.1 S、0.2 S、0.3 S时改变温度,采用阶梯参数仿真,数据为
,在0.1 S、0.2 S、0.3 S时改变温度,采用阶梯参数仿真,数据为 、
、 、
、 。在外界温度发生变化的情况下,光伏发电模型搜索跟踪最大功率点的过程仿真如图14所示。
。在外界温度发生变化的情况下,光伏发电模型搜索跟踪最大功率点的过程仿真如图14所示。
从图13和图14仿真结构波动图来看,该光伏发电系统仿真模型能够很快的搜索到对应外界条件下的最大功率点(约0.04 s),并且在跟踪过程中光伏系统输出的电压和电流波动都比较小。
6. 结论
本文介绍了多种最大功率点追踪的控制方法,最终采用增量电导法,基于双向Cuk斩波电路,建立了光伏电池最大功率点追踪仿真模型。Matlab/Simulink仿真结果表明:所建立光伏发电系统模型可以准确的反映I-U和P-U特性曲线;同时,所采用的双向Cuk斩波电路在光照强度和温度不断变化的情况下能够准确快速的实现最大功率点追踪,跟踪过程中光伏阵列输出的电压和电流曲线平滑、稳定,因此该仿真模型具良好的动态性和实用性的优点。
文章引用
刘小荷,居 荣,荣园园. 基于双向Cuk电路的光伏电池最大功率点追踪系统
Photovoltaic Maximum Power Point Tracking System Based on Bidirectional Cuk Converter[J]. 电气工程, 2016, 04(02): 105-116. http://dx.doi.org/10.12677/JEE.2016.42014
参考文献 (References)
- 1. Wiles, J.C. and Bower, W. (1997) Photovoltaic Industry-Proposed Changes for the 1999 National Electrieal Code for PV Applications. 26th IEEE Photovoltaie Specialists Conference, 1237-1242.
- 2. 苏建徽, 余世杰, 赵为, 等. 硅太阳电池工程用数学模型[J]. 太阳能学报, 2001, 22(4): 409-412.
- 3. 赵玉文. 太阳能利用的发展概况和未来趋势[J]. 中国电力, 2003(9): 110-112.
- 4. 易桂平, 胡仁杰. 太阳能光伏电池建模与动态特性仿真[J]. 江苏电机工程, 2014(5): 32-35.
- 5. Hussam, K.H., Muta, I., Hoshino, T., et al. (1995) Maximum Photovoltaic Power Tracking an Algorithm for Rapidly Changing Atmospheric Conditions. IEE Proceedings of Generation, Transmission and Distribution, 142, 59-64. http://dx.doi.org/10.1049/ip-gtd:19951577
- 6. 中国可再生能源学会. 2008年中国新能源与可再生能源产业发展报告[R]. 北京: 中国可再生能源学会, 2008.
- 7. 周林, 武剑, 栗秋华, 等. 光伏阵列最大功率点跟踪控制方法综述[J]. 高电压技术, 2008, 34(6): 1145-1154.
- 8. 赵庚申, 王庆章, 许盛之. 最大功率点跟踪原理及实现方法的研究[J]. 太阳能学报, 2006(10): 998-1001.
- 9. 陈科, 范兴明, 张鑫, 等. 基于Matlab的光伏阵列输出特性和最大功率点跟踪控制策略的研究[J]. 低压电器, 2012, 9(18): 27-31.
- 10. 奚佚芳. 光伏发电DC/DC变流器的研究[D]: [硕士学位论文]. 浙江: 浙江大学, 2008.
- 11. 杨秀, 臧海洋, 舒海莲, 等. 基于BOOST电路的PV最大功率点追踪仿真[J]. 上海电力学院学报, 2016(6): 591- 596.
- 12. 童亦斌, 金新民, 陈瑶. 双向DC/DC变换器的拓扑研究[J]. 中国电机工程学报, 2007, 27(13): 81-86.