Smart Grid
Vol.4 No.06(2014), Article ID:14612,8 pages
DOI:10.12677/SG.2014.46032
Study of Networked AGC System Model in Hydropower Station Considering Network Delay
1College of Electronics and Information Engineering, Sichuan University, Chengdu
2Sichuan Mingxing Electric Power Co., Ltd., Suining
3School of Electric Power, North China University of Water Resources and Electric Power, Zhengzhou
Email: 13982561720@163.com, juyang1990@163.com, liyanpin@ncwu.edu.cn
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Nov. 13th, 2014; revised: Dec. 10th, 2014; accepted: Dec. 17th, 2014
ABSTRACT
The structure and the network delay characteristics of networked AGC system are introduced and the models of traditional hydropower station AGC system are discussed in detail. Based on the analysis of network delay model and its simulation module, a new AGC system model considering network delay is proposed. Simulating by using MATLAB/Simulink software shows that the new model can achieve satisfactory control effect, which has a good control of network delay.
Keywords:Network Delay, AGC, Hydro-Generator, MATLAB

考虑网络时延的水电站网络化AGC系统
模型研究
王 波1,2,鞠 阳3,李延频3
1四川大学电子信息学院,成都
2四川明星电力股份有限公司,遂宁
3华北水利水电大学电力学院,郑州
Email: 13982561720@163.com, juyang1990@163.com, liyanpin@ncwu.edu.cn
收稿日期:2014年11月13日;修回日期:2014年12月10日;录用日期:2014年12月17日

摘 要
介绍了网络化AGC系统的结构以及网络时延的特性,讨论了传统水电站AGC系统的模型。通过对网络时延模型及其仿真模块的分析,建立了考虑网络时延的新AGC系统模型。运用MATLAB/Simulink软件进行仿真模拟,结果表明采用网络时延的新模型对网络时延具有较好的控制性能,可以达到较为满意的控制效果。
关键词
网络时延,AGC,水轮发电机,MATLAB

1. 引言
近年来,随着EMS [1] (能量管理系统)和水电厂自动化系统的发展,水电站AGC(自动发电控制)系统从模拟控制到数字控制,从集散控制到现场总线、工业以太网。控制系统由单一、独立的系统发展到复杂、分级的集成系统,使水电站大范围的网络化协调控制成为可能。
网络化给控制系统带来许多便利,例如:降低成本、实现节点智能化、控制功能分散化、改善控制性能和提高控制品质等;由于网络节点之间通过共享网络传输信号,不可避免地带来网络时延。网络时延的存在会降低整个水电站AGC系统的性能,会导致系统控制性能恶化,甚至导致系统不稳定,而且时延的存在给传统控制理论的直接应用也带来一些困难[2] 。因此,需要对网络时延所带来的问题进行研究,从而提高整个水电站AGC系统的有效性和稳定性。
2. 网络化AGC系统
网络化AGC系统的框架如图1所示。这部分网络包括现场总线和工业以太网两种模式。在现场总线方式下智能执行机构通过网关与电厂自动化系统连接。在以太网模式下,智能执行机构通过工业以太网接口直接与电厂自动化系统连接。
3. 网络时延
3.1. 网络时延的描述
从时延产生的过程来看,系统中的总时延 可以分为三个部分[3] :
可以分为三个部分[3] :
 (1)
(1)
式中,i——第i个采样周期; ——传感器发出测量信号到执行器接收到控制信号之间的总时延;
——传感器发出测量信号到执行器接收到控制信号之间的总时延; ——传感器到控制器的时延;
——传感器到控制器的时延;![]() ——控制器的计算时延;
——控制器的计算时延; ——控制器到执行器的时延。
——控制器到执行器的时延。
其中,![]() 是随机的,并且比
是随机的,并且比 、
、 小很多,而且可以通过适当的软硬件设计加以控制使其更小。因此在分析中
小很多,而且可以通过适当的软硬件设计加以控制使其更小。因此在分析中![]() 可忽略,或将其归于
可忽略,或将其归于 中[4] 。大多数情况下,网络时延是时变不确定的,它可能大于也可能小于一个采样周期。根据不同的网络协议,时延可以建模为常数时延、随机时延和时变时延。
中[4] 。大多数情况下,网络时延是时变不确定的,它可能大于也可能小于一个采样周期。根据不同的网络协议,时延可以建模为常数时延、随机时延和时变时延。
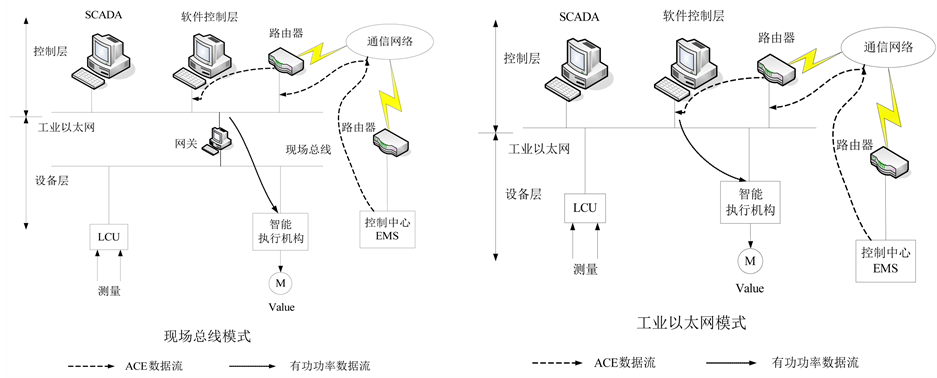
Figure 1. The structure of networked AGC system
图1. 网络化AGC系统结构图
3.2. 网络AGC的时延特性
网络化AGC系统时延包括控制中心到电厂自动化系统和调速器到机组智能执行机构两部分延迟。对于AGC业务,通过网络传输的数据主要包括联络线交换功率的实际值、计划值,系统频率的实际值、计划值,ACE(区域控制偏差)以及受控机组的相关值。数据包的长度一般为固定长度,传输方式为周期性传输,从控制中心到电厂发送周期一般为3~4 s,从调速器到执行机构的发送周期为ms级。
从控制中心到电厂属于广域网通信,其延迟包括:数据处理、传输延迟、信号的传播延迟以及数据包的排队延迟。除排队延迟外,其他延迟都是确定的。只有当ACE信号延迟远大于AGC扫描周期时,这部分延迟才会对系统的稳定性造成影响。相关研究表明当ACE延迟到达10 s时,系统会出现振荡,当延迟到达30 s时,系统才会失去稳定。工程实际中,其信号延迟大约在数百ms以内。因此ACE信号的延迟,对系统稳定性影响可忽略。
从调速器到执行机构属于局域网通信,其延迟包括:数据处理、传输延迟、信号的传播延迟以及数据包的等待延迟。除等待延迟外,其他延迟都是确定的。由于调速器模块的扫描周期在ms级,考虑到电厂自动化系统端到端的延迟基本在几百ms以内,正好与调速器模块的扫描周期在同一数量级。这部分延迟对网络化AGC控制影响比较突出[5] 。本文重点研究这部分时延的影响。
3.3. 网络时延的研究
实现电力系统网络化控制,信号的传输和处理延迟的影响是一个不容忽视的问题,针对这些基本问题,许多研究人员从控制或通信的角度进行了分析和研究,文献[6] 研究了有时延和数据包丢失的建模和控制问题,文献[7] [8] 研究了网络化时延的通信调度问题,文献[9] 综合考虑了控制和通信的影响。然而,大部分的研究都是针对电力系统和控制系统,还未见到水电站AGC系统时延问题的研究文献。但在实际生产中,水电站是重要的能源之一,其网络时延对系统的影响不容忽视。所以本文提出了一种考虑网络时延的水电站AGC系统模型。
4. 网络时延系统模型
4.1. 时延系统的数学模型
假设一个互联区域的电力系统采用网络化AGC控制方式,且采用水轮发电机组作为二次调频手段,将AGC系统在正常的工作点线性化,可以得到系统的时延状态方程[10] 如式(2)所示。
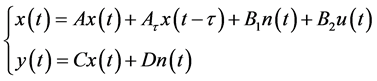 (2)
(2)
式中: ——状态变量;
——状态变量; ——负荷扰动;
——负荷扰动; ——控制量;
——控制量; ——为调速器到智能执行机构的延时。
——为调速器到智能执行机构的延时。
式(2)中的各系数矩阵为:
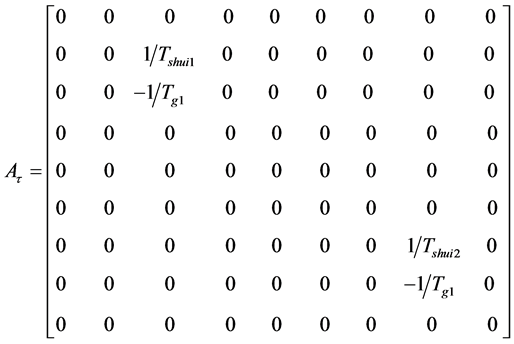


 ;
; (3)
(3)
式中: ——发电机的转动惯量;
——发电机的转动惯量; ——发电机的阻尼系数;
——发电机的阻尼系数; ——水轮机的时间常数;
——水轮机的时间常数;![]() ——发电机的惯性时间常数。
——发电机的惯性时间常数。
水电站AGC系统一般有三种控制方式:定联络线交换功率控制(FFC)、定频率控制(FTC)和联络线偏差控制(TBC)。TBC控制方式是最常见的互联电网控制方式,本文研究TBC控制方式。
4.2. 传统的AGC系统模型
传统的水电站AGC控制是基于专线方式,是点到点的控制,不通过实时网络来传输。与系统本身的时间常数相比,网络时延很小,可忽略不计。这种方式的时延对系统影响不大,并且在传统的控制理论中做了一些假设,如数据包的无延迟、无差错、无丢失等[5] 。
以水轮发电机组构建的AGC系统模型如图2所示。
其中,![]() ——监控中心发出的负荷指令,
——监控中心发出的负荷指令,
 ——执行机构的时间常数,
——执行机构的时间常数, ——水轮机的时间常数,
——水轮机的时间常数, ——电力系统的时间常数,
——电力系统的时间常数, ——增益,
——增益,![]() ——调差系数,
——调差系数,![]() ——频率偏差系数,
——频率偏差系数, ——第
——第![]() 控制区域的频率偏差,
控制区域的频率偏差, ——第
——第![]() 控制区域联络线上有功功率变化,
控制区域联络线上有功功率变化, ——第
——第![]() 控制区域水轮发电机组有功功率变化,
控制区域水轮发电机组有功功率变化, ——第
——第![]() 区域负荷扰动变化,
区域负荷扰动变化,![]() ——区域
——区域 之间的同步系数,
之间的同步系数,![]() ——离散变量,若第
——离散变量,若第 区域之间有功率交换,则为1,否则为0。
区域之间有功率交换,则为1,否则为0。
4.3. 考虑网络时延的AGC控制系统
由前面的分析可知,负荷指令![]() 由调度中心通过通信网络下发到水轮发电机组的控制器,控制中心到电厂自动化系统和调速器到执行机构两部分延迟经等效变换后可合并为一个总的网络时延,将时延模块加入到调度中心到机组控制系统的前向通道中,即得到新的网络时延模型,如图3所示。
由调度中心通过通信网络下发到水轮发电机组的控制器,控制中心到电厂自动化系统和调速器到执行机构两部分延迟经等效变换后可合并为一个总的网络时延,将时延模块加入到调度中心到机组控制系统的前向通道中,即得到新的网络时延模型,如图3所示。
本文建立的时延部分MATLAB/Simulink仿真模块如图4所示。
其中,In为输入量,Out为输出量。输入量经过保持器采样后作为模块Variable Transport Delay的第一个输入。模块Delay对其第一个输入量进行一个可变的延迟后输出,时延大小由其第二个输入量(模块Random Number)确定。通过改变模块Random Number的参数就可以调节时延的均值、方差,从而模拟实际网络中不同的时延情况。由于当均值和方差的比值在一定范围之内时,输出有可能出现负值,此时模块Delay会将其作为0值处理,这与实际情况不符,所以在模块Random Number之后加入一个绝对值模
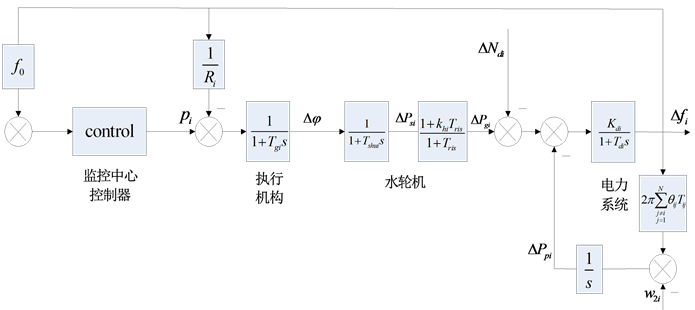
Figure 2. The model of the traditional AGC system
图2. 传统AGC系统模型
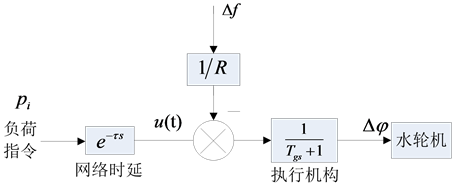
Figure 3. The model considered network delay
图3. 加入网络时延后的模型
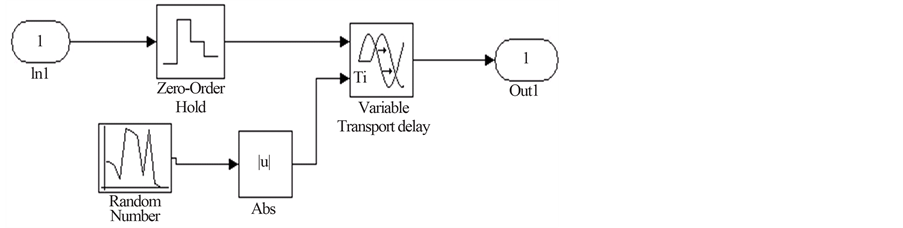
Figure 4. The diagram of time delay module simulation
图4. 时延模块仿真图
块,以保证所有的时延都是正值。
在水电站实际运行中,调度中心下发负荷指令到水轮发电机组的协调控制器上,然后控制器将负荷指令机组输出的有功功率进行计算,根据计算的偏差输出控制信号来调节导叶开度,使负荷指令与机组输出的有功功率一致。这里存在一个控制水轮发电机组输出有功功率的闭合回路,传统的系统模型将其简化为一个没有反馈的开路,只考虑执行机构和水轮机环节。本文将协调控制系统作为水轮发电机组输出有功功率的控制回路加入到图3所示的模型中,形成新的控制环节。该控制回路由协调控制器(Control2模块)、执行机构和水轮机环节组成,如图5所示。
4.4. 网络时延的AGC系统模型
在此基础上我们建立新的AGC模型,新模型是一个包含时延环节的串级结构网络控制系统,如图6所示。
5. 仿真实例
本文采用两区域的互联AGC系统模型。通过MATLAB/Simulink搭建的仿真模块对新模型和控制方法进行验证,如图7所示。
由于负荷扰动(有功功率)对系统的控制性能具有重要的影响且更符合实际的生产过程,所以对区域一设置负荷扰动,扰动设置在10 s时刻,扰动量为0.01 p.u. MW,区域二负荷保持不变。水轮机、发电机

Figure 5. The model of inner loop system joined the coordinated controller
图5. 加入协调控制器后的内回路系统模型
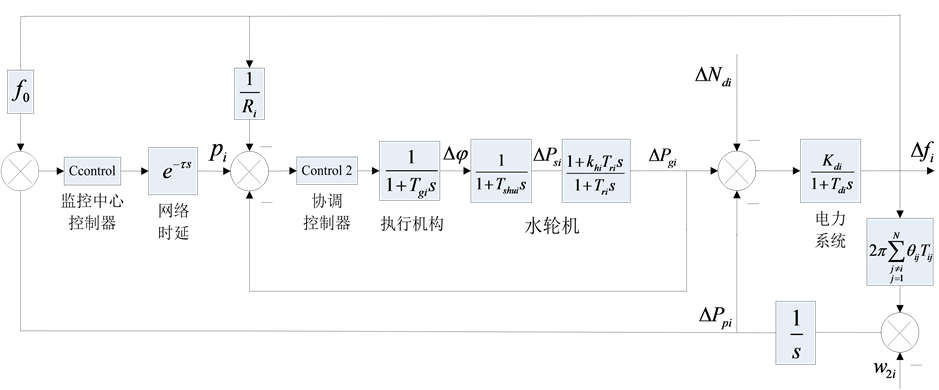
Figure 6. The model of AGC system considered network delay
图6. 考虑网络时延的AGC系统模型
和调速器的参数设置可参见文献[11] ,分别采用传统控制方法和考虑时延控制方法进行仿真。
传统的AGC系统采用PI控制[12] ,不考虑延时环节。仿真结果如图8和图9所示。其中,纵坐标表示频率偏差的相对值,横坐标表示仿真时间。在发生负荷扰动时,区域1和区域2的频率偏差符号相反。区域1为负,发电机组出力不平衡造成系统频率下降。在机组调速器作用下,增加机组出力,两区域的频率偏差相对值在70秒内收敛到0,区域1的负向最大偏差在0.027 Hz,区域2的正向最大偏差为0.015 Hz。因为系统中存在网络时延,自动调速系统不能精确的控制机组出力变化,不利于系统频率的恢复,由此导致了系统出现了几次振荡,这对机组的稳定性运行不利。
再对考虑时延环节的AGC系统模型进行仿真,设置延时时间为5 ms,仿真结果如图10和图11所示。两区域的频率偏差相对值在40秒内收敛到0,区域1的负向最大偏差为0.012 Hz,区域2的正向最大偏差为0.013 Hz。新系统考虑了网络时延的影响,采用了新模块的控制方法,在发生负荷扰动时,系

Figure 7. The model of AGC system considered network delay built by Simulink
图7. 用Simulink搭建的考虑网络时延的AGC系统模型

Figure 8. The frequency deviation of division one under the traditional AGC control method
图8. 区域一在传统AGC控制方法下的频率偏差
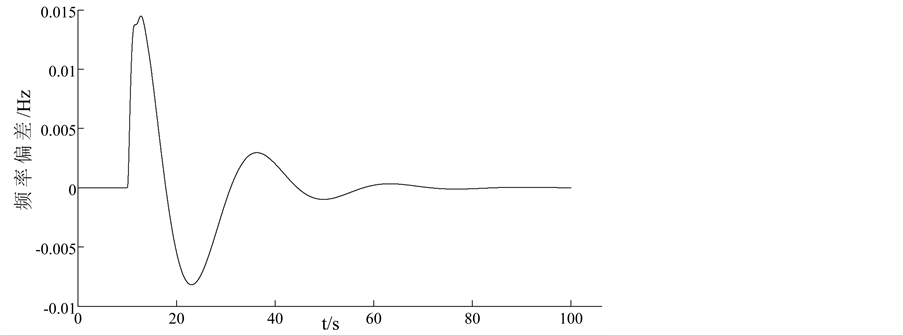
Figure 9. The frequency deviation of division two under the traditional AGC control method
图9. 区域二在传统AGC控制方法下的频率偏差

Figure 10. The frequency deviation of division one under the AGC control method considered network delay
图10. 区域一在考虑网络时延的AGC控制方法下的频率偏差
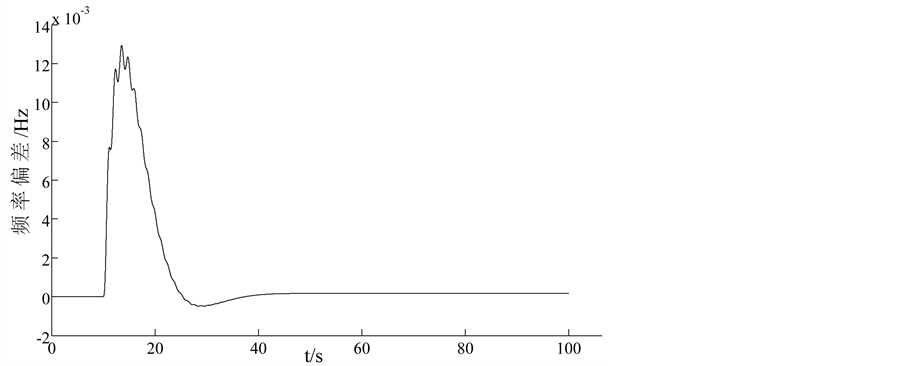
Figure 11. The frequency deviation of division two under the AGC control method considered network delay
图11. 区域二在考虑网络时延的AGC控制方法下的频率偏差
统频率偏差可以更快的恢复到零点,振荡次数显著减少,系统频率能够得到平稳的恢复。
仿真结果表明考虑网络时延环节的AGC系统模型的调节性能比传统PI控制(无时延)的调节性能强,在系统发生扰动时,频率偏差的超调量、振荡次数和收敛时间显著减少,收敛速度增加,有利于系统的稳定运行。
6. 结语
本文研究了系统中关于网络时延的影响问题,初步探讨了一种新的控制思路。在传统系统模型基础上,推导时延系统的数学模型,加入时延环节的等效变换,提出了一种新的系统模型。该模型同时考虑了网络时延环节和机组控制系统环节,较完整的描述系统的实际运行规律,可以达到较为满意的控制效果,能有效地克服网络时延对系统稳定性的影响,可以实现对机组的稳定调节,有效地保证ACE和频率的性能指标,本文提出的优化模型对水电站的自动发电控制优化具有实际的意义。
本文对系统的研究思路、模型及相应的方法的探讨只是初步的,还有一些问题需要继续深入研究,主要包括以下几个方面:
1) 本文所提出的针对新系统模型的网络时延是一个固定时延。而在实际系统中,由于系统网络的不确定会出现不同的网络时延,因此,还需要对具有随机时延的系统模型及其系统稳定进行下一步的研究。
2) 新系统模型没有考虑到系统中实际存在的非线性环节,例如:调速器死区。如果引入这些非线性环节,则需要用到非线性理论来分析,这些问题也有很大的应用意义,可作为下一步的研究方向。
3) 本文关于网络化AGC系统,只考虑了系统中的网络时延问题,对于系统之间的数据丢包等问题,还未进行过分析。因此,研究如何消除数据丢包对系统的影响,也是一个具有工程意义的课题。
基金项目
四川明星电力股份有限公司科研攻关项目(MXDL2014-06-06),江苏省博士后科研资助计划项目(1402099C),郑州市普通科技攻关项目(43204522),华北水利水电大学博士基金(40299)。
参考文献 (References)
- [1] 于尔铿, 刘广一, 周京阳 (1997) 能量管理系统(EMS)第1讲EMS的技术发展. 电力系统自动化, 1, 25-27.
- [2] 黄从智, 白焰, 刘向杰 (2009) 一类网络化串级控制系统的性能分析. 化工自动化及仪表, 5, 34-39.
- [3] 张杰超 (2008) 预测控制在网络化自动发电控制系统中的应用研究. 硕士论文, 华北电力大学, 北京.
- [4] 陈维莉 (2006) 网络化二级电压紧急控制的传输时延研究. 硕士论文, 华中科技大学, 武汉.
- [5] 何飞跃 (1997) 网络化控制系统在电力系统中的应用研究. 硕士论文, 华中科技大学, 武汉.
- [6] Xie, D., Chen, X. and Lv, L. (2008) Asymptotical stability of networked control systems time-delay switched approach. IET Control Theory & Applications (S1751-8644), 2, 743-751.
- [7] Kim, D.S., Choi, D.H. and Mohapatra, P. (2009) Real-time scheduling method for networked discrete control systems. Control Engineering Practice (S0967-0661), 17, 564-570.
- [8] 徐湘元, 徐丰芹 (2007) 网络控制系统的调度概述. 信息与控制, 3, 380-385.
- [9] Branicky, M.S., Liberatore, V. and Phillips, S.M. (2003) Networked control system co-simulation for co-design. Proceedings of the American Control Conference, Denver, 4-6 June 2003, 3341-3346.
- [10] 段献忠, 何飞跃 (2006) 考虑通信延迟的网络化AGC鲁棒控制器设计. 中国电机工程学报, 22, 35-40.
- [11] Kundur, P. (1994) Power system stability and control. 周孝信, 宋永华, 译, 中国电力出版社, 北京.
- [12] 郭钰锋, 徐志强, 于达仁 (2004) 考虑调频死区的二次调频控制回路设计. 中国电机工程学报, 10, 77-81.