Hans Journal of Wireless Communications
Vol.06 No.06(2016), Article ID:19409,9
pages
10.12677/HJWC.2016.66017
Research on Downlink Communications Performance of Satellite-Submarine Based on Single Photon Detection
Xin Li*, Yong Qian, Weige Zhu, Jun Xia
Shanghai Institute of Satellite Engineering, Shanghai

Received: Dec. 8th, 2016; accepted: Dec. 21st, 2016; published: Dec. 28th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
With the development of military technology, submarine is becoming the key to sea field. It is outstandingly important to research communication system with high data rates and safety for improving the survival ability of submarine. The traditional communication means, such as VLF and RF, need submarine float in the sea surface, which is inconvenient in war. Blue-green laser communication has attracted considerable attention as the “window” for underwater communications. In this paper, the down link communications performance of satellite-submarine is based on single photon detection. The downlink model is analyzed, and the factors of transmitted laser power, sea water working depth, pointing and tracking errors are all discussed. The results show that GM APD based single detection communication systems are available for submarine working in depth of 30 - 500 m. However, there are still more key technologies to research before the realization of blue-green laser communication between satellite and submarine.
Keywords:Single Photon Detection, GM APD, Blue-Green Laser, Pointing and Tracking Errors, Satellite-Submarine Communications

基于单光子探测体制的星潜下行链路通信性能研究
李鑫*,钱勇,朱维各,夏俊
上海卫星工程研究所,上海

收稿日期:2016年12月8日;录用日期:2016年12月21日;发布日期:2016年12月28日

摘 要
随着当今军事科技的发展,潜艇成为掌握海底战场主动权的关键。研究具有数据率高、隐蔽性好的对潜通信系统,提高对潜通信能力在战略威慑和战术应用上都具有重要意义。目前常用的对潜通信方式有超长波、微波等,需要潜艇将天线浮出水面,或地基设备庞大等特点,不易于战时应用。蓝绿激光对潜通信是目前研究的热点,与微波通信相比可以大大提高潜艇的安全深度,且具有方向性好、抗截获抗干扰抗摧毁能力强的特点。然而将其应用到星潜链路时,受星载高功率激光器发射功率制约,以及海水的散射和吸收,潜艇的通信深度仍然受到约束。本论文对基于GM APD单光子探测器的星潜光通信链路进行研究,对星潜下行链路进行了建模,讨论了发射功率、潜艇工作深度、跟瞄误差等因素对链路的通信性能的影响。研究表明,采用基于GM APD单光子探测器的星潜光通信系统,潜艇在工作深度(30~500 m)接收卫星信息是可行的。然而受硬件设备技术水平的限制,该技术的具体实施还有诸多关键技术需要攻关。
关键词 :单光子探测,GM APD,蓝绿激光,跟瞄误差,星潜通信

1. 引言
战略核潜艇是一个国家战略核威慑力量的重要组成部分。由于陆地上核设施易受攻击,生存能力差,战略核潜艇的地位日益突出 [1] 。现代通信技术已经相当成熟,但是在水下实现远距离的通信如果仍然采用超短波、微波等手段,将面临如下问题。目前通常的潜艇通信方式是潜艇定期浮到天线漏出深度,将天线升出水面收报。这种方式极易被敌人发现,具有很大的危险性 [2] 。另一种潜艇通信是利用超低频通信,但基地设备非常庞大,无法进行实时指挥,且巨大的设备很容易受到敌人的攻击。对潜通信是各潜艇强国研究的热点和重点,自潜艇出现以后,各国都在努力探讨适合于潜艇通信的新方法。因此,迫切需要开发研制其它数据率更高、隐蔽性更好的对潜通信系统,蓝绿激光对潜通信系统正是在上述背景下诞生的。1963年,S. A. Sullivan及S. Q. Dimtley等人在研究光波在海洋中的传播特性时,发现海水对450~ 580纳米波段内的蓝绿光的衰减比对其他光波段的衰减要小很多,证实在海洋中亦存在一个类似于大气中存在的透光窗口 [3] 。用蓝绿激光实现对潜通信的主要特点有:① 潜艇的安全深度大大提高;② 频率高、耗能少;③ 方向性好,抗截获、抗干扰、抗摧毁能力强。
在对潜通信中,卫星是对潜艇通信的主要手段 [4] [5] 。将激光发射器放在同步卫星上,地面站把要传输的信息转换成微波信号后传送至卫星,卫星再将微波信号转换成电信号,并控制激光发射器,使其产生调制编码蓝绿激光输出。在扫描反射镜控制下,激光束可对预定的海区进行扫描,位于该海区的水下潜艇收到激光信号后将其解调,即可得到地面站传送的信息。这种方案不论是隐蔽性还是有效性都是不容置疑的,应该说它是激光对潜通信的最佳方式。然而受链路距离远、目前星载蓝绿激光器功率不高、蓝绿激光在海水中衰减极快等因素影响,导致蓝绿激光的海水穿透深度不高,大大制约了星潜通信应用。
具有单光子探测灵敏度的盖革模式的雪崩光电二极管(Geiger mode avalanche photodiodes, GM APD)可以很好地解决这个问题 [6] [7] [8] 。GM APD具有单光子级的探测灵敏度,并且输出信号为数字信息,利于大规模集成。以GM APD为探测器的光通信系统的探测器,具有探测灵敏度高、时间响应快、探测器集成度高、对激光器能量要求低、系统体积小、功耗低等多方面的优势,具备在军事和民用领域大规模应用的条件 [9] [10] [11] 。作为新兴的探测器,GM APD是提升星潜光通信系统穿水深度的关键。目前关于GM APD的研究多应用在激光成像雷达上,而以GM APD作为通信探测器的研究则未见报导。
本文对基于GM APD单光子探测器的星潜光通信链路的通信性能进行了研究。首先对星潜下行链路进行了建模,基于该模型对发射功率、潜艇工作深度、跟瞄误差等因素对链路的通信性能的影响关系进行了数值仿真和分析,讨论了星潜单光子通信的可行性。本论文的研究工作可以为实际星潜激光通信系统的设计提供理论依据。
2. 可见光通信链路设计星潜下行链路建模
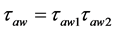
对于星潜激光通信来说,如图1所示,通信信道主要由三部分组成:太空信道、大气信道、海水信道。太空信道可以认为是真空信道,激光的传输以距离衰减和几何衰减为主,这两类衰减大气信道和海水信道同样具有。除此之外,对大气信道,特别是海面上空的大气多由雾、云和雨组成,它们会对激光信号产生散射和吸收。在海水信道部分,由于溶于海水中的有机物分子、为例和微生物的作用,会对光产生散和吸收。在这里特别要考虑的是大气/海水界面,界面处由于海水的镜面反射和白浪反射,会对信号产生衰减,并在一定程度上改变光线传播方向。由于每种信道都各有特点,因此有必要针对不同信道进行建模。
2.1. 大气对激光的影响
大气由大气分子、气溶胶(悬浮微粒)和水气凝结物(云、霾、雾、雨、雪等)组成,与大气的吸收相比,大气对光造成的衰减主要是由大气散射造成的。大气中相对湿度小于80%时出现霾,而大于80%时则出现雾,雨的粒子尺度最大,但其粒子密度比雾小得多,所以它对可见光的衰减系数比雾要小。霾是大气中最普遍的物理成分,它存在于从地面到深空的范围内,并且呈梯度分布。霾具有较强的前向散射特性,但是霾的粒子密度和粒子半径都是大气各种成分中最小的,它对光的衰减较小。云的粒子半径分布比雾和霾大得多,对激光的传输影响很大,因此计算时一般按云来考虑。
云的衰减系数如表1所示。
2.2. 气水界面对激光的影响
海深不同,海底浪涌和海面的浪高也不一样,由于海水的镜面反射和白浪反射,会对信号产生衰减。光由空气进入海面时,能量的界面透射率为:
 (1)
(1)
第一项是由折射率不连续性决定的界面透射率(由海面风速和光入射角所决定),第二项是由海水泡沫及条纹决定的界面投射率(取决于海面风速)。
Figure 1. Satellite-submarine communication link based on single photon detection
图1. 星潜单光子通信链路

Table 1. Attenuation coefficient of different kinds of clouds
表1. 不同云型对激光的衰减系数
2.3. 海水对激光的影响
由于海水本身的散射和海水中悬浮粒子引起的散射,而悬浮粒子的尺寸分布随水质不同差异很大,海水中粒子的散射要比大气的散射强2到3个数量级,下面对光在海水中的散射情况进行分析。海水的衰减系数与水中的浮游生物浓度,水中的悬浮粒子、盐分及温度有关主要考虑有云天空的情况,这时入射到海水里的是云的漫射光。对于漫射光,海水的衰减遵从指数规律,其透射率为
 (2)
(2)
 为总的吸收系数,
为总的吸收系数, 为瑞利散射系数,
为瑞利散射系数, 为米氏散射系数,
为米氏散射系数, 为海水深度。
为海水深度。
激光在水下传输光路为多重散射,水对光的衰减主要是水分子和浮游生物的散射,其次是水的吸收效应。海水通道最为复杂,除了考虑上面所提及的因素,在实际应用中,还应考虑海上风速,背景辐射等等情况。
特别指出,衰减系数是系统的有效衰减系数,它由系统的接收视场角、卫星高度及海水的水质光学参数等共同决定。漫射衰减系数是海水的固有光学性质参数,不随人为的试验测量方法和测量参数的变化。当系统接收光斑直径足够大时,有效衰减系数近似等于海水的漫射衰减系数。表2为对潜通信系统中,漫射衰减系数和有效衰减系数在三类海区中的对应数值。
Table 2. Attenuation coefficient of sea water
表2. 不同水域海水衰减系数
2.4. 星潜下行链路信号传输模型
根据上述分析,蓝绿激光输出单脉冲能量为 ,水下潜艇光通信终端的GM APD探测器能检测到的初级光子数目为:
,水下潜艇光通信终端的GM APD探测器能检测到的初级光子数目为:
 (3)
(3)
其中, 为大气分析散射的透射率,
为大气分析散射的透射率, 为气水界面引起的传输损耗因子,
为气水界面引起的传输损耗因子, 为发射端光学系统的透射率,
为发射端光学系统的透射率, 为接收光学系统的透过率,
为接收光学系统的透过率, 为与光强分布和视场角有关的因子,
为与光强分布和视场角有关的因子, 为链路总距离,
为链路总距离, 为海水深度,
为海水深度, 为星潜激光通信系统跟瞄误差,
为星潜激光通信系统跟瞄误差, 为接收天线面积,
为接收天线面积, 为GM APD量子效率。
为GM APD量子效率。
3. 数值仿真及分析
对于单光子对潜通信来说,我们主要关注的是最先到达的光子的数量和时刻,从而根据约定时间间隔内“有”“无”信号来对传输信号进行解码。因此在本论文里主要考虑光束主传输路径上的光强,不考虑激光在海水里经多次散射到达的光子。
本小节主要通过公式(3)进行数值仿真,讨论卫星不同轨道高度、系统跟瞄误差、激光发射功率等对海水穿透深度的影响。选择典型系统参数: ,
, ,
, ,
, ,
, ,
, ,束散角半宽
,束散角半宽 ,单脉冲能量
,单脉冲能量 ,接收口径0.2 m、0.5 m、1 m、1.5 m不等。
,接收口径0.2 m、0.5 m、1 m、1.5 m不等。
3.1. GEO卫星对潜通信
对于GEO卫星来说,星潜链路距离为
 (4)
(4)
3.1.1. 潜艇GM APD探测到的初级光子数与海水深度关系
对于I、II、III类海区,取典型衰减值分别为0.07、0.144、0.27,仿真得到当对准误差为零时,接收光子随海水深度的变化关系如图2所示
仿真结果表明:
Ø 探测器接收到的光子数随海水深度增加呈指数衰减
Ø 当海水衰减系数越大时,探测器接收到的光子数越少
Ø 在上述所给的系统参数下,为了保证接收光子在10个以上(蓝色标注线),对于I、II、III类海区,潜艇终端的深度需保持在220 m,120 m,60 m以上。
3.1.2. 接收光子数为10,激光发射功率随海水深度变化关系
对于I类海区,取典型衰减值分别为0.07,仿真得到当对准误差为零时,保证接收光子数目为10个,对不不同的天线接收口径,发射激光脉冲能量随海水深度的变化关系如图3所示。
 (5)
(5)
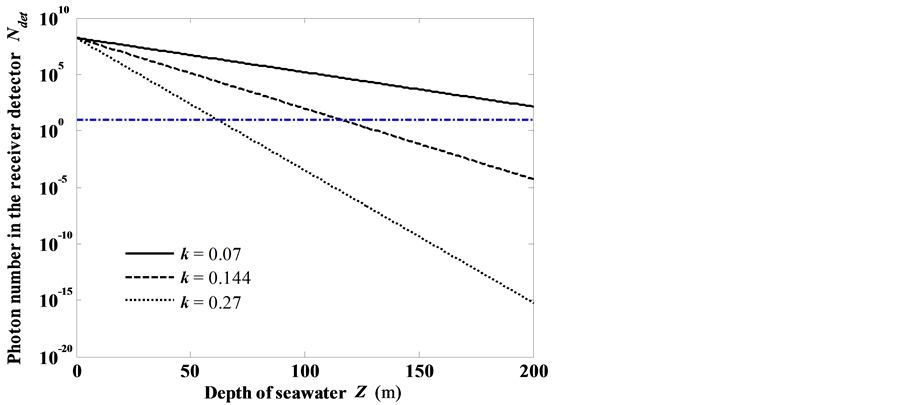
Figure 2. Received photon number varies with depth of sea water for various waters
图2. 不同海域条件下,接收光子数随海水深度变化关系

Figure 3. Depth of seawater as a function of laser transmitted power with different receiving diameter
图3. 不同接收孔径下,激光发射功率与海水穿透深度关系(蓝色标注线为10 mJ)
仿真结果表明:
Ø 同样的系统条件下,增大天线口径可以有效提升激光在海水中的穿透深度;
Ø 同样的系统条件下,发射激光脉冲能量越大,相应的海水穿透深度越大。
3.1.3. 跟瞄误差对接收光子数的影响
对于I类海区,取典型衰减值分别为0.07,水深度200 m处,探测器接收到的光子数随跟瞄误差变化关系如图4所示。
仿真结果表明:
Ø 同样的系统条件下,接收到的光子数随跟瞄误差的增大而呈高斯衰减。
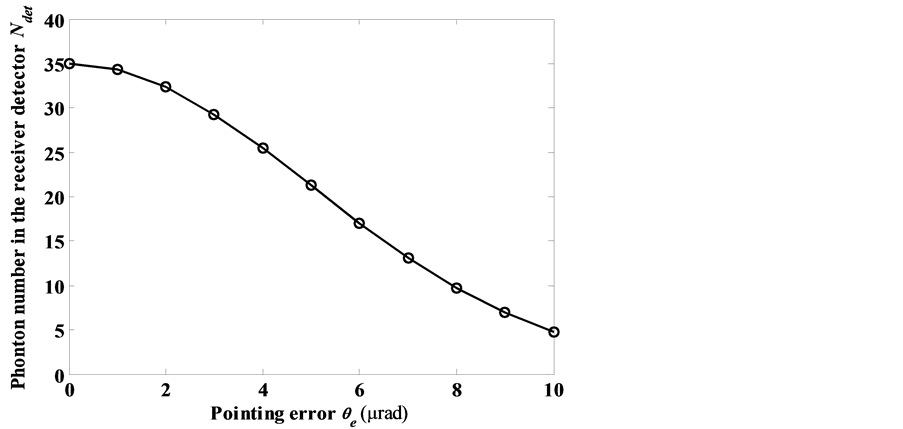
Figure 4. Received photon number varies with pointing and tracking errors
图4. 接收光子数随跟瞄误差变化关系
3.2. LEO卫星对潜通信
对于LEO卫星来说,选取轨道高度为400 km,则其对潜艇通信链路距离为:
 (6)
(6)
3.2.1. 潜艇GM APD探测到的初级光子数与海水深度关系
对于I、II、III类海区,取典型衰减值分别为0.07、0.144、0.27,仿真得到当对准误差为零时,接收光子随海水深度的变化关系如图5所示。
仿真结果表明
Ø 变化规律与GEO类似;
Ø 其他条件相同时,卫星轨道高度越低,潜艇可工作的海水深度越深。
3.2.2. 接收光子数为10,激光发射功率随海水深度变化关系
对于I类海区,取典型衰减值分别为0.07,仿真得到当对准误差为零时,保证接收光子数目为10个,对不同的天线接收口径,发射激光脉冲能量随海水深度的变化关系如图6所示。
仿真结果表明
Ø 变化规律与GEO类似;
Ø 其他条件相同时,卫星轨道高度越低,潜艇可工作的海水深度越深。
3.2.3. 跟瞄误差对接收光子数的影响
对于I类海区,取典型衰减值分别为0.07,水深度350 m处,探测器接收到的光子数随跟瞄误差变化关系(见图7)。
仿真结果表明
Ø 变化规律与GEO类似;
Ø 其他条件相同时,卫星轨道高度越低,潜艇可工作的海水深度越深。
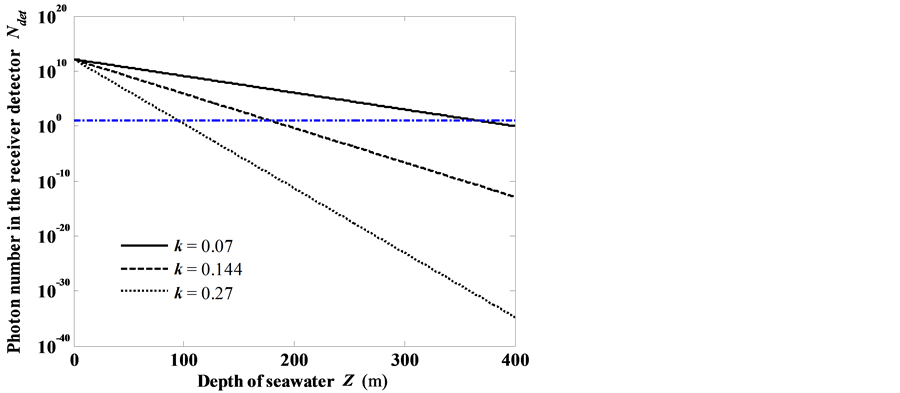
Figure 5. Received photon number varies with depth of sea water for various waters
图5. 不同海域条件下,接收光子数随海水深度变化关系
Figure 6. Depth of seawater as a function of laser transmitted power with different receiving diameter (the blue line represents the transmitted power is 10 mJ)
图6. 不同接收孔径下,激光发射功率与海水穿透深度关系(蓝色标注线为10 mJ)
4. 结论
鉴于目前星潜激光通信中海水穿透深度不高的难题,本文提出采用具有单光子探测灵敏度的GM APD为光通信系统探测器。根据GM APD工作原理,对星潜下行链路进行了建模,基于该模型数值仿真分析了卫星轨道高度、发射功率、跟瞄误差等对海水穿透深度的影响关系。数值仿真结果表明:1) 当激光脉冲能量为6 mJ,接收天线口径0.2 m,I类海区,在保证接收光子数至少为10个时,对于GEO来说潜艇终端深度可达220 m,对于400 km的LEO来说潜艇终端深度可达370 m;2) 其他条件相同时,卫星轨道高度越低,潜艇可工作的海水深度越深;3) 在接收光字数一定的条件下,增大天线口径,可有效提升潜艇通信深度;4) 其他系统条件一定的条件下,跟瞄误差越小,接收到的光字数越多;5) 海水衰减
Figure 7. Received photon number varies with pointing and tracking errors
图7. 接收光子数随跟瞄误差变化关系
系数越小时,接收光子数越高,即探测概率越高。本文的研究结果表明,GM APD探测器在星潜光通信系统中的应用可以大大提高对海水的穿透深度,保证潜艇工作的隐蔽性,在对潜通信领域具有广阔的应用前景。
致谢
本文研究工作由自然科学基金委的青年基金进行支持,基金号:61401279。
文章引用
李 鑫,钱 勇,朱维各,夏 俊. 基于单光子探测体制的星潜下行链路通信性能研究
Research on Downlink Communications Performance of Satellite-Submarine Based on Single Photon Detection[J]. 无线通信, 2016, 06(06): 133-141. http://dx.doi.org/10.12677/HJWC.2016.66017
参考文献 (References)
- 1. 李俊清. 星载激光对潜通信系统研究[J]. 船舰电子工程, 1998(1): 18-29.
- 2. 张杨, 张芳, 卞勇. 激光通信及其在潜艇通信中的应用[J]. 无线光通信, 2006(7): 43-45.
- 3. 柳树要, 何焰蓝. 激光对潜通信原理及发展[J]. 现代物理知识, 2005, 17(5): 19-21.
- 4. 谭显裕. 潜艇通信方式与现状及激光对潜艇通信的地位和作用[J]. 火力与指挥控制, 1995, 20(3): 63-71.
- 5. 江月明. 对潜通信系统及其发展探讨[J]. 无线电工程, 2003, 9(33): 51-52.
- 6. Heinrichs, R.M., Aull, B.F., Marino, R.M., Fouche, D.G., McIntosh, A.K., Zayhowski, J.J., et al. (2001) Three Dimensional Laser Radar with APD Arrays. Proceedings of SPIE, 4377, 106-117. https://doi.org/10.1117/12.440098
- 7. Marino, R.M. and Davis Jr., W. R. (2005) Jigsaw: A Foliage Penetrating 3D Imaing Laser Radar System. Lincoln Laboratory Journal, 15, 23-36.
- 8. Oh, M.S., Kong, H.J., Kim, T.H., Hong, K.H., Kim, B.W. and Park, D.J. (2010) Time-of-Flight Analysis of Three- Dimensional Imaging Laser Radar Using a Geiger Mode Avalanche Photodiode. Japanese Journal of Applied Physics, 49, Article ID: 026601. https://doi.org/10.1143/JJAP.49.026601
- 9. Marino, R.M., Davis, W.R., Rich, G.C., McLaughlin, J.L., Lee, E.I., Stanley, B.M., et al. (2005) High Resolution 3D Imaging Laser Radar Flight Test Experiments. Proceedings of SPIE, 5791, 138-151. https://doi.org/10.1117/12.609679
- 10. Marino, R.M., Richardson, J., Garnier, R., Ireland, D., Bick-meier, L., Siracusa, C. and Quinn, P. (2009) Photon- Counting Lidar for Aerosol Detection and 3D Imaging. Proceed-ings of SPIE, 7323, 7323OH.
- 11. Redman, B., Ruff, W. and Giza, M. (2006) Photon Counting Chirped AM Laser: Concept, Simulation, and Initial Experimental Results. Proceedings of SPIE, 6214, 62140P.
*通讯作者。