Mechanical Engineering and Technology
Vol.05 No.02(2016), Article ID:17780,7
pages
10.12677/MET.2016.52010
The Motion Simulation of Electronic Control External Groove Wheel Device Based on PRO/E and ADAMS
Feng Xu
College of Engineering, Huazhong Agricultural University, Wuhan Hubei

Received: May 26th, 2016; accepted: Jun. 10th, 2016; published: Jun. 13th, 2016
Copyright © 2016 by author and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
The virtual prototype model of Electronic Control External Groove Wheel Device has been established by using PRO/E and ADAMS and the relevant constraints and movement functions have been set. The movement of Electronic Control External Groove Wheel Device has been designed and analyzed, including the movement of sieve plate rotation , the movement of geneva wheel and blocking shaft with variable lateral movement and variable speed rotation. Using hall element to collect data, processing data and transmitting signal through the MCU that controls the effective working length and rotational speed of geneva wheel and blocking shaft. Finally, the device can realize control of the sowing quantity.
Keywords:External Groove Wheel Device, Electronic Control, Virtual Prototype, Dynamic Simulation

基于PRO/E和ADAMS的电控外槽轮式排种器运动仿真
许丰
华中农业大学工学院,湖北 武汉

收稿日期:2016年5月26日;录用日期:2016年6月10日;发布日期:2016年6月13日

摘 要
本文利用PRO/E和ADAMS建立了外槽轮式排种器的电控运动仿真模型,并设定相关约束与运动函数,对虚拟样机进行了动态仿真。对电控外槽轮式排种器的运动进行了设计,其中包括筛板对种子筛选的旋转运动,外槽轮式排种器槽轮与阻塞轮轴向变速移动与其同排种轴的变速转动。并使用霍尔元件采集数据,使用单片机处理数据并发射信号控制外槽轮式排种器槽轮与阻塞轮的有效工作长度与转速来实现对排种器播量的控制。电控外槽轮式排种器能够直接根据机具前进速度调节播量,提高对环境的适应性。
关键词 :外槽轮式排种器,电控,动态仿真,虚拟样机

1. 引言
目前中国农户普遍使用的外槽轮式排种器对不同的地貌适应性较差,如遇潮湿地滑的情况时传统外槽轮式排种器排量不稳定,甚至不能下地工作。传统外槽轮式排种器的排种轴是由地轮带动的,而地轮在不同的地貌与不同的特性的土地下有不同的滑移率。而地轮滑移率则是影响传统外槽轮式排种器的适应性的最主要因素 [1] 。因此解决地轮滑移率对排种器的影响,提高排种器的适应性是现阶段排种器的发展发向。而目前国内尚未出现有效解决此问题的排种器出现 [2] 。本文介绍一种通过自动控制技术辅助改进后的外槽轮式排种器,并通过ADAMS软件对其进行运动仿真,检验其是否达到设计要求。
2. 外槽轮式排种器总体设计方案
图1是外槽轮式排种器总体设计方案效果图,可以看出外槽轮式排种器是由9个主要部分组成。当排种轴转动时,外槽轮及外槽轮式排种器外壳上的花形挡环可防止种子从槽轮两侧流出。此排种器适应性强,能够多种条播还可应用于固体颗粒化肥等排施 [3] 。工作时槽轮被排种轴带动旋转,种子依靠重力充满槽轮的凹槽中随之一起旋转。当种子被带动至槽轮朝向地表侧时,在自重的作用下掉落入种沟从而完成排种。而其中影响外槽轮式排种器排种主要的参数有槽轮的有效工作长度与排种轴的转速 [4] 。本装置通过霍尔元件所测得机具前进速度传输给单片机,再由单片机控制液压系统和步进电机来调控槽轮有效长度与排种轴转速,从而有效地调整播量。
3. 电控外槽轮式排种器样机建模
1) 打开ADAMS/View,选择新建模型,之后在输入框中输入模型名称paizhongqi。
2) 在pro/e创建电控外槽轮式排种器三维模型。图2即为该模型主要部件的模型,总装效果图见图1。
3) 将pro/e实体模型导入ADAMS。
将pro/e中已经装配好的实体模型如图1所示,另存为x_t文件,在ADAMS-FILE-IMPORT选项下打开导入三维模型对话框如右图3。
点击 图标创建标准种子Z1~Z1_10位于排种器上,依次创建小种子PART_23~PART_35,大种子PART_36、PART_37与标准种子PART_38、PART_39位于上筛板上,并修改各个种子的材料与颜色。
图标创建标准种子Z1~Z1_10位于排种器上,依次创建小种子PART_23~PART_35,大种子PART_36、PART_37与标准种子PART_38、PART_39位于上筛板上,并修改各个种子的材料与颜色。
最后修改其他部件材料和颜色属性,并依次重命名。
电控外槽轮式排种器的整体装配效果如图1所示。
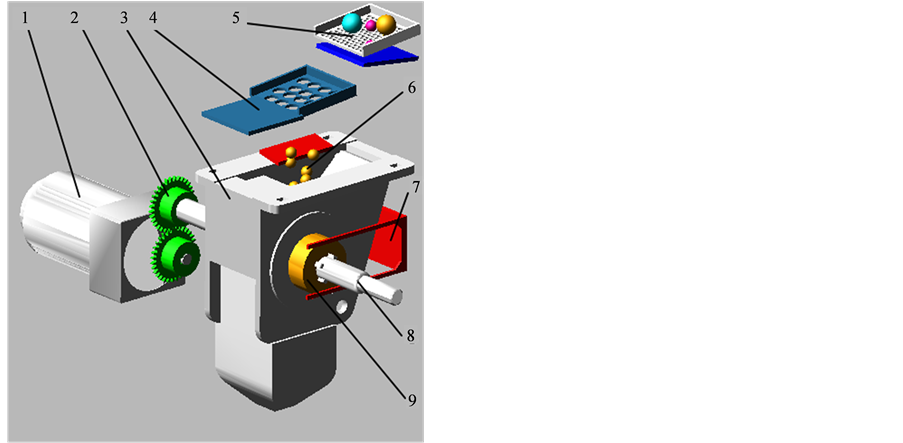 1:电机;2:齿轮组;3:外槽轮式排种器外壳;4:下筛板;5:上筛板;6:种子流;7:夹板;8:排种轴;9:外槽轮式排种器槽轮与阻塞轮
1:电机;2:齿轮组;3:外槽轮式排种器外壳;4:下筛板;5:上筛板;6:种子流;7:夹板;8:排种轴;9:外槽轮式排种器槽轮与阻塞轮
Figure 1. The major structure of Electronic Control External Groove Wheel Device
图1. 电控外槽轮式排种器主要结构
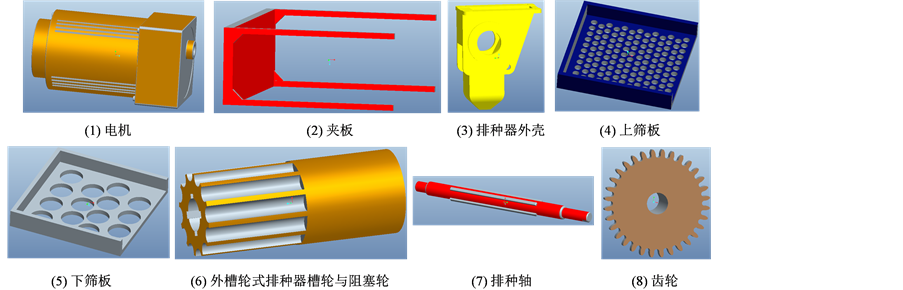
Figure 2. The main parts’ model of Electronic Control External Groove Wheel Device
图2. 电控外槽轮式排种器主要部件模型
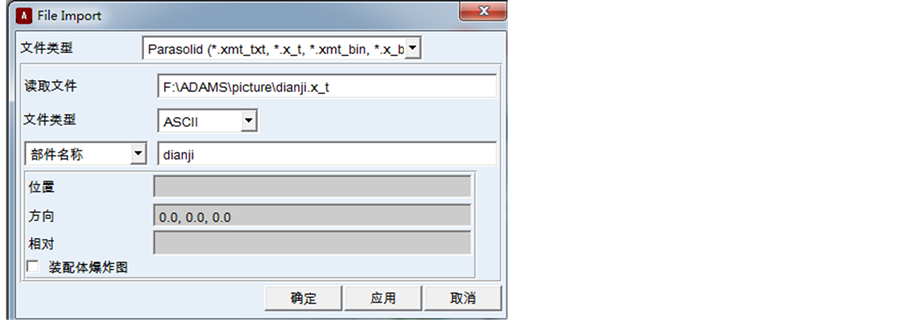
Figure 3. 3D-model importing dialog box
图3. ADAMS导入三维模型对话框
4. 添加约束与驱动
模型中包含众多约束与力,要注意添加约束与力作用的对象,在选用约束的时候要注意不要形成过约束以免模型不能仿真。并且在模型中运动的实体零件上增加约束时,要注意约束点的选择是否能符合要求能使零件正常运动。在栅格平面与选择工具的帮助下选择正确的方向也是十分重要的一点。
1) 单击约束工具箱中的图标 ,在排种轴与地、齿轮1与地、齿轮2与地、电机轴与地、上筛板与地、下筛板与地之间在它们的回转中心添加转动副,并依次重命名各个旋转约束。
,在排种轴与地、齿轮1与地、齿轮2与地、电机轴与地、上筛板与地、下筛板与地之间在它们的回转中心添加转动副,并依次重命名各个旋转约束。
2) 单击motion中的 然后点击要添加驱动力的旋转约束,添加完成后,选中驱动再右键选择modify,修改驱动力函数。
然后点击要添加驱动力的旋转约束,添加完成后,选中驱动再右键选择modify,修改驱动力函数。
要添加的转动驱动力的约束及其驱动力函数如下:
① 给电机轴添加旋转驱动力:
选择motion中的 选中电机轴的旋转约束,修改驱动力函数为:180d*time。
选中电机轴的旋转约束,修改驱动力函数为:180d*time。
② 给上下筛板增加旋转驱动力:
选择motion中的 选中上下筛板的旋转约束,由于上下筛板的作用不同所要求的运动规律也不同进过实验,修改上筛板驱动力函数为:6d*sin(40*time)。修改下筛板驱动力函数为:3d*sin(200*time)。
选中上下筛板的旋转约束,由于上下筛板的作用不同所要求的运动规律也不同进过实验,修改上筛板驱动力函数为:6d*sin(40*time)。修改下筛板驱动力函数为:3d*sin(200*time)。
3) 单击图标 ,在夹板与地之间添加移动约束。并选择motion中的
,在夹板与地之间添加移动约束。并选择motion中的 电机夹板的移动约束,添加完成后,选中驱动再右键选择modify,修改驱动力函数为: step(time,0,-600d,1,600d)+step(time,1,600d,2,-600d)。
电机夹板的移动约束,添加完成后,选中驱动再右键选择modify,修改驱动力函数为: step(time,0,-600d,1,600d)+step(time,1,600d,2,-600d)。
4) 选择约束工具箱中的图标 ,在外槽轮式排种器槽轮与阻塞轮与地之间添加圆柱副,并重命名此约束。
,在外槽轮式排种器槽轮与阻塞轮与地之间添加圆柱副,并重命名此约束。
5) 选择约束工具箱中的图标 ,在电机轴与齿轮1、齿轮1与齿轮2、齿轮2与排种轴、排种轴与外槽轮式排种器槽轮与阻塞轮之间添加1:1的耦合副,并重命名约束。
,在电机轴与齿轮1、齿轮1与齿轮2、齿轮2与排种轴、排种轴与外槽轮式排种器槽轮与阻塞轮之间添加1:1的耦合副,并重命名约束。
6) 选择约束工具箱中的图标 ,在排种器外壳与地之间添加固定副,并重命名此约束 [5] 。
,在排种器外壳与地之间添加固定副,并重命名此约束 [5] 。
5. 添加接触力
在添加力时,需要注意持续接触摩擦力要尽量避免防止仿真速度过慢不能达到所需效果。使用耦合副等来辅助避免添加过多的持续接触摩擦力。
选择力工具箱中的图标 ,在夹板与外槽轮式排种器槽轮与阻塞轮、各个种子之间、种子与筛板、种子与排种器外壳、种子与外槽轮式排种器槽轮与阻塞轮之间添加接触力,接触力皆选择弹性碰撞并重命名各个接触力。
,在夹板与外槽轮式排种器槽轮与阻塞轮、各个种子之间、种子与筛板、种子与排种器外壳、种子与外槽轮式排种器槽轮与阻塞轮之间添加接触力,接触力皆选择弹性碰撞并重命名各个接触力。
6. 仿真分析
对上述模型进行仿真,选择仿真工具箱中的图标 ,设置end time为2,steps为100,选择
,设置end time为2,steps为100,选择 进行仿真分析。
进行仿真分析。
1) 对槽轮在X轴方向的位移分析
由图4所示槽轮在X轴方向的位移曲线与图5所示夹板在X轴方向的位移进行对比可知俩零件的质心在X轴方向做着同样的运动。由于夹板与外槽轮式排种器槽轮与阻塞轮是紧密接触的所以当夹板在X轴方向运动的同时,外槽轮式排种器槽轮与阻塞轮也会随之运动。但由于它们的质心的初始位置不同,所以在图中体现出是两条形状相同起点不同的曲线。这能说明夹板能准确的调节槽轮的有效工作长度。
2) 割台与拨禾轮的角度分析
在电机轴按函数180d*time运动时输出的槽轮的角速度如图6所示。可以从图中看到槽轮的角速度也一直稳定在180 d,故槽轮在电机匀速运动时转速输出稳定。
更改电机轴转动函数为:step(time,0,0d,1,180d)+step(time,1,0d,2,180d),我们可得到如图7所示的槽轮角速度变化图与图8电机轴角速度变化图。由于排种轴与外槽轮式排种器槽轮与阻塞轮是紧密接触的,为了避免添加不必要的持续接触力这里用了耦合副来连接两物体。故可以保证电机在变速转动时槽轮也可以输出相应的转速。说明电机能很好的控制槽轮的转速。
3) 对电控外槽轮式排种器技术要求分析
外槽轮式排种器主要的技术要求是排种的变异系数不能过大 [2] ,而排种的变异系数由排量所决定,而排量由槽轮有效工作长度与外槽轮式排种器槽轮与阻塞轮的转速决定。由上述分析已知电控外槽轮式排种器能够很好的控制这两个决定因素进而控制排量减小变异系数,故符合设计的要求。
7. 总结
本文介绍了利用adams对电控外槽轮式排种器仿真建模的方法,主要实现外槽轮式排种器工作时槽轮的有效长度随夹板的运动,槽轮随排种轴的旋转运动,两筛板筛选种子的上下运动,以及种子随以上运动被排出的运动。本模型在理论上说明了电控外槽轮式排种器实现的可行性,也为该排种器的具体参数设计提供了理论依据。

Figure 4. The groove wheel’s displacement in x-axis
图4. 槽轮在X轴方向的位移
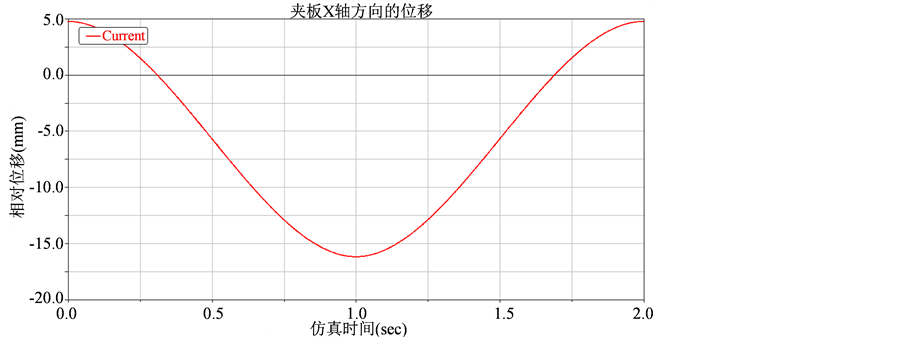
Figure 5. The pallet’s displacement in x-axis
图5. 夹板在X轴方向的位移
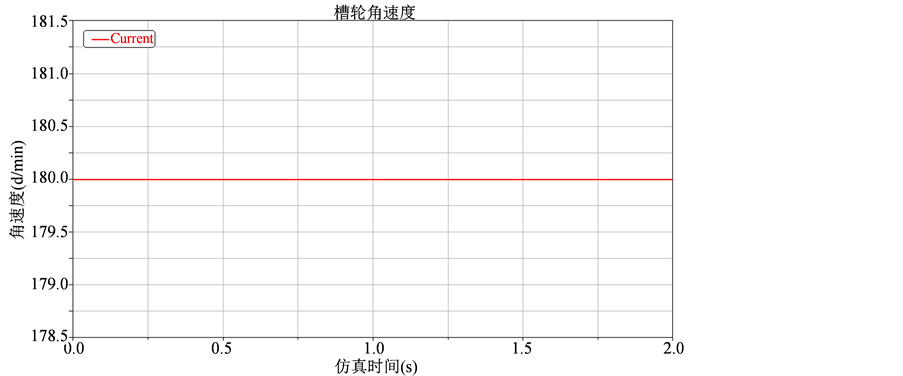
Figure 6. The Groove Wheel’s constant angular velocity
图6. 槽轮在匀速时的角速度
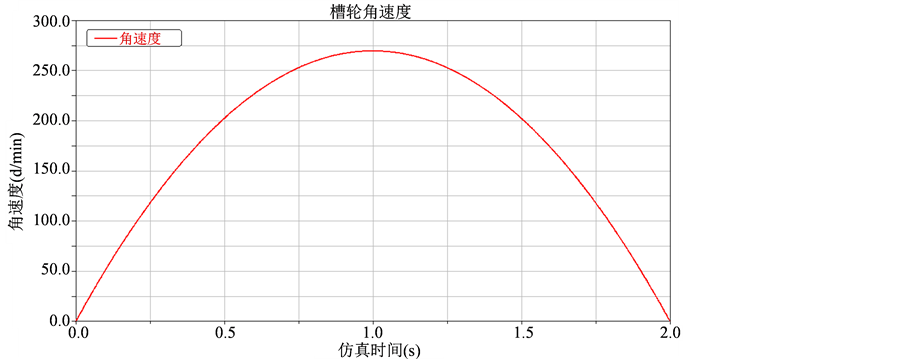
Figure 7. The groove wheel’s variable angular velocity
图7. 槽轮在变速时的角速度

Figure 8. The motor’s variable angular velocity
图8. 电机在变速时的角速度
基金项目
华中农业大学国家级大学生创新创业训练计划(201610504062)。
文章引用
许 丰. 基于PRO/E和ADAMS的电控外槽轮式排种器运动仿真
The Motion Simulation of Electronic Control External Groove Wheel Device Based on PRO/E and ADAMS[J]. 机械工程与技术, 2016, 05(02): 76-82. http://dx.doi.org/10.12677/MET.2016.52010
参考文献 (References)