Dynamical Systems and Control
Vol.3 No.03(2014), Article ID:13844,5 pages
DOI:10.12677/DSC.2014.33007
Controlling Chaotic Vibration of Vehicle Suspension by Sliding Mode Control
1School of Mechanics and Power Engineering, North University of China, Taiyuan
2School of Transportation and Vehicle Engineering, Shandong University of Technology, Zibo
3College of Mechatronic Engineering, North University of China, Taiyuan
Email: wwwhuangguan@126.com
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: May 14th, 2014; revised: May 26th, 2014; accepted: Jul. 8th, 2014
The suspension system is a key component of the car, and it has a significant impact on the car ride. Through the establishment of a single degree of freedom quarter car model we obtain dynamic equation. We use Runge-Kutta method for numerical analysis of the system equations and obtain parameters by changing the amplitude of the system and reveal the critical amplitude chaos. By MATLAB/SIMULINK software analysis, sliding mode control can be used to solve the problem of strong nonlinear vibration and achieve real-time control of suspension system, and it has good robustness.
Keywords:Suspension, A Quarter-Car Model, Chaos, Sliding Mode Control

黄 冠1,刘灿昌2,崔俊杰3
1中北大学机械与动力工程学院,太原
2山东理工大学交通与车辆工程学院,淄博
3中北大学机电工程学院,太原
Email: wwwhuangguan@126.com
收稿日期:2014年5月14日;修回日期:2014年5月26日;录用日期:2014年7月8日

悬架系统是汽车的关键部件,对汽车的平顺性有重要的影响。通过建立单自由度1/4汽车模型得到动力学方程。采用龙格–库塔法对系统方程进行数值分析,并通过改变激励参数得到系统的临界振幅及揭示混沌现象。通过MATLAB/SIMULINK软件对系统进行控制仿真,滑模控制可以用来解决强非线性振动的控制问题,可以实现对悬架系统的实时控制,且具有良好的鲁棒性。
汽车悬架,1/4汽车模型,混沌,滑模控制

悬架系统是影响汽车乘坐舒适性和操纵稳定性的主要部件,传统的被动悬架只能保证在某种特定的道况和速度下达到性能最优。最新研究的悬架多是采用磁流变减振器的半主动悬架。半主动悬架的减振器常表现为非线性特性[1] ,而且悬架的各个子系统之间相互作用,其隔振系统的输出状态容易进入混沌振动[2] 。此外,汽车在行驶过程中还会有许多不确定因素,其混沌振动在一定的载荷激励下影响十分突出[3] 。因而,对悬架系统建模,并进行数值仿真,分析出现的混沌现象,将为汽车的动态设计和结构改进及悬架系统的设计提供重要的理论依据,并有助于提高对混沌现象本质的认识。
目前,对悬架的混沌振动控制方式有状态反馈控制、时滞控制、神经网络控制、模糊控制等控制策略。与其它控制算法相比,本文采用的滑模控制具有建模简单,控制精度高、非线性适应性强等优点。
本文通过建立了汽车简化模型,得出单自由度1/4悬架系统的动力学方程,利用MATLAB/SIMULINK构建了系统的仿真模型,改变路面激励参数模拟混沌现象,并利用滑模控制实现汽车悬架混沌控制。
假设汽车的悬架质量分配系数![]() ,轮胎的变形很小,忽略轮胎的弹性与质量,得到分析汽车垂直方向振动的单自由度1/4汽车模型[4] ,如图1。
,轮胎的变形很小,忽略轮胎的弹性与质量,得到分析汽车垂直方向振动的单自由度1/4汽车模型[4] ,如图1。
单自由度1/4汽车模型动力学方程为[5]
 (1)
(1)
 为车体质量,
为车体质量, 是悬架系统的阻尼力和刚度力,由相对位移和速度决定[6] 。
是悬架系统的阻尼力和刚度力,由相对位移和速度决定[6] 。
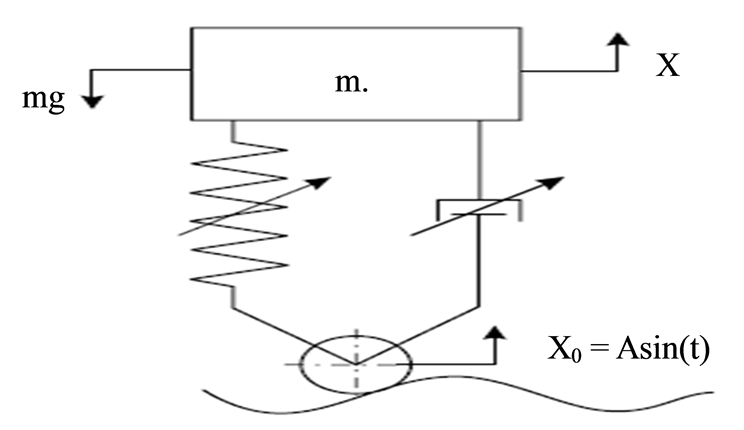
Figure 1. Single degree of freedom 1/4 car model
图1. 单自由度1/4汽车模型
 (2)
(2)
其中: 为线性刚度系数,
为线性刚度系数,![]() 为非线性刚度系数,
为非线性刚度系数, 为线性阻尼系数,
为线性阻尼系数, 为非线性阻尼系数。
为非线性阻尼系数。
 (3)
(3)
其中:![]() 为路面激励,激励频率
为路面激励,激励频率 ,
, 是汽车的速度,A和
是汽车的速度,A和![]() 分别是道路轮廓的振幅和波长。
分别是道路轮廓的振幅和波长。
定义一个新的变量
 (4)
(4)
可以得到
![]() (5)
(5)
其中, ,
, ,
, ,
, 。
。
式(5)的状态方程可写为
 (6)
(6)
给定系统参数为 ,
, ,
, ,
, ,
, 。分别令A
= 0.25、0.41,
。分别令A
= 0.25、0.41,![]() ,初始条件为
,初始条件为 ,
, 。取时间步长为0.005
s,用四阶定步长Runge-Kutta法对式(6)进行数值分析,可得到系统的时间历程、相轨迹,如图2所示。
。取时间步长为0.005
s,用四阶定步长Runge-Kutta法对式(6)进行数值分析,可得到系统的时间历程、相轨迹,如图2所示。
通过数值模拟发现,图2(a)、2(b)中 相轨迹图起初复杂无章最终轨迹重合,时间历程趋向呈现明显的规律性。而图2(c)、2(d)中(A
= 0.41)相轨迹图不重复且杂乱无章,时间历程曲线不规律,最大的李雅普诺夫指数为
相轨迹图起初复杂无章最终轨迹重合,时间历程趋向呈现明显的规律性。而图2(c)、2(d)中(A
= 0.41)相轨迹图不重复且杂乱无章,时间历程曲线不规律,最大的李雅普诺夫指数为 ,可以判定此时(A = 0.41)悬架系统的运动为混沌振动。
,可以判定此时(A = 0.41)悬架系统的运动为混沌振动。
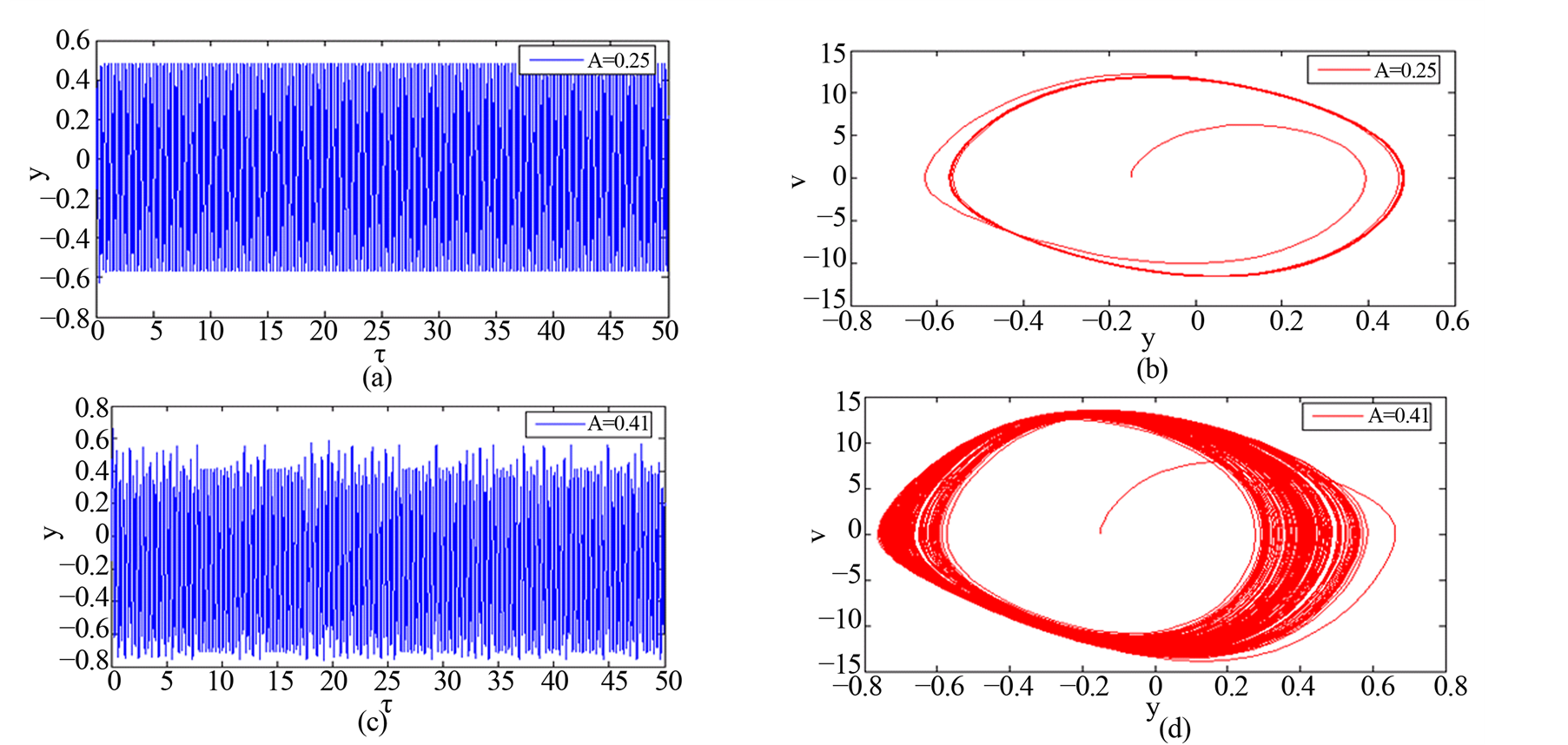
Figure 2. (a) and (b) The time course curve and phase trajectory when A = 0.25; (c) and (d) Time history curves and phase trajectory when A = 0.41
图2.( a)、(b) A=0.25时的时间历程曲线和相轨迹;(c)、(d) A = 0.41时的时间历程曲线和相轨迹
对式(6)变形得到
 (7)
(7)
其中,![]() ,
,![]() ,
,![]() 。
。
通过三次强非线性系统强迫振动改进的L-P法可以证明![]() 有界[7]
,可得到
有界[7]
,可得到 ,
, 。
。
系统的滑模面为
 (8)
(8)
其中c为正常数。
控制律可写成
 (9)
(9)
式中 项为控制增益
项为控制增益
 (10)
(10)
其中 。
。
对式(8)求导得
 (11)
(11)
将u代入式(11)得
 (12)
(12)
则
 (13)
(13)
将式(10)代入(13)得
 (14)
(14)
由式(14)可知,系统的滑模面是渐近稳定的。
取位置跟踪信号为 ,则
,则 ,
, ,控制参数
,控制参数![]() ,
,![]() ,
, 。对象初始状态为[−0.15,
0.1]。仿真结果如图3、图4、图5所示。
。对象初始状态为[−0.15,
0.1]。仿真结果如图3、图4、图5所示。
Figure 3. Time course curve of system and tracking signal curve after control
图3. 控制前后系统的时间历程曲线及跟踪信号变化曲线
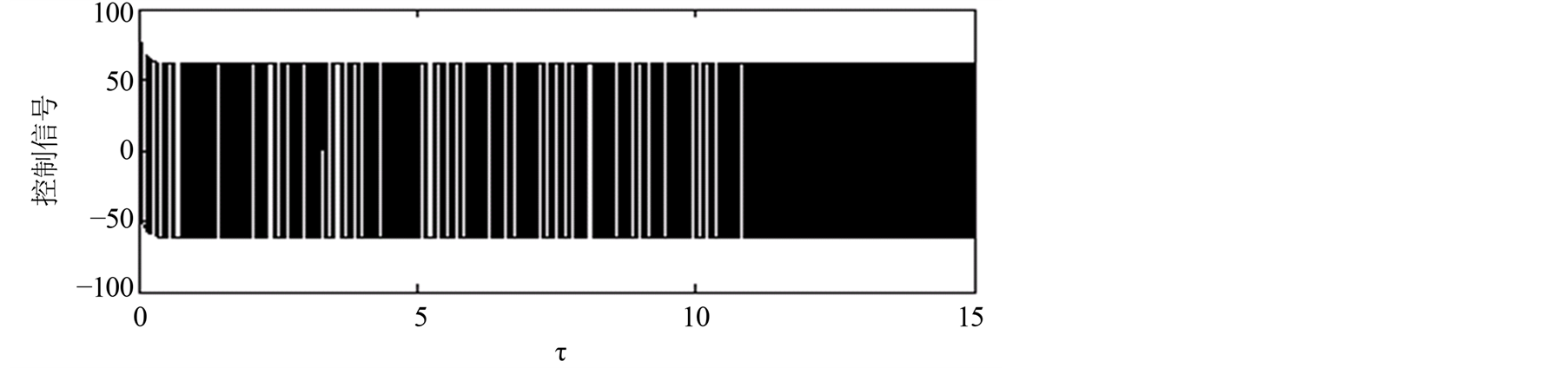
Figure 4. Time course curve of control signal
图4. 控制信号时间历程曲线

Figure 5. Phase trajectories
图5. 相轨迹
在图3中,可以看出基于上下界的滑模控制算法也能够实现悬架系统的运动轨迹随输入的跟踪信号变化。在图4中可以看到输入的控制信号的随时间的变化规律。由图5可知,控制后系统的运动轨线在滑模面上来回移动,说明了滑膜控制能够实现对混沌振动的控制。
由分析可知,针对悬架系统的混沌振动设计的状态的滑模控制器,可以实现对混沌的控制。这种方法不仅仅可以让原系统稳定在目标平衡点上,还可以用来跟踪目标函数,从而降低了汽车行驶过程中悬架系统的振动幅度及速度,实现了对汽车车身高度及悬架的动挠度的有效控制,提高了汽车行驶平顺性和操作稳定性。
汽车悬架系统是一个复杂的非线性系统,本文充分考虑了悬架系统存在的非线性因素,建立了一个研究悬架系统的混沌振动的单自由度1/4汽车模型。利用数值方法研究了这一系统存在的复杂动力学行为,通过MATLAB/SIMULINK软件仿真,得到系统在不同激励参数影响下的时间历程图、相图,证明了悬架系统会产生混沌振动。并提出了一种有效的滑模控制策略,仿真的结果表明该策略能够有效地控制混沌振动。
- [1] 郭大蕾, 胡海岩 (2002) 基于磁流变阻尼器的车辆悬架半主动控制研究——间接自适应控制与实验. 振动工程学报, 3, 285-288.
- [2] 盛云, 吴光强 (2008) 汽车非线性悬架的混沌研究. 汽车工程, 1, 57-60.
- [3] 吴光强, 盛云 (2010) 混沌理论在汽车非线性系统中的应用进展. 机械工程学报, 10, 81-87.
- [4] 余志生 等 (2006) 汽车理论. 机械工业出版社, 北京.
- [5] Li, S., Yang, S. and Guo, W. (2004) Investigation on chaotic motion in histeretic non-linear suspension system with multi-frequency excitations. Mechanics Research Communications, 31, 229-36.
- [6] Litak, G., Borowiec, M., Friswell, M. and Szabelski, K. (2008) Chaotic vibration of a quarter-car model excited by the road surface profile. Communications in Nonlinear Science and Numerical Simulation, 13, 1373-1383.
- [7] 陈树辉, 等 (2007) 强非线性振动系统的定量分析. 北京科学出版社, 北京.