 Applied Physics 应用物理, 2011, 1, 108-115 http://dx.doi.org/10.12677/app.2011.13018 Published Online October 2011 (http://www.hanspub.org/journal/app/) Copyright © 2011 Hanspub APP Study on the Application of Poincaré Section Algorithm to Chaotic Vibration Identification Shuyong Liu, Shijian Zhu, Qingchao Yang, Aibo Yang Ship Structure and Power College, Naval University of Engineering, Wuhan Email: lsydh@sina.com Received: Aug. 26th, 2011; revised: Sep. 24th, 2011; accepted: Sep. 26th, 2011. Abstract: In the process of Poincaré section extraction for chaotic vibration identification, there are many problems such as selection of the Poincaré section location on the phase space attractor reconstructed from single variable time series, determination of these sections when the system under quasi-periodic excitations, should be solved effectively. The improved Poincaré section is presented in this paper. The main idea is to consider these points which are satisfied with the neighborhood condition as the same section points, and a bunch of experimental trajectories which are derived from the signals are normalized. The simulation and experiment results show that when the cluster orbits of experimental attractor occur and the system is excited with different frequencies, the improved method is applied to determine the Poincaré section correctly. The interested phenomenon including multi-periodic behavior, chaos, and quasi-periodic vibration section are observed. Keywords: Poincaré Section; Orbits Cluster; Chaos Poincaré 截面法在混沌振动识别中的应用研究 刘树勇,朱石坚,杨庆超,杨爱波 海军工程大学船舶与动力学院,武汉 Email: lsydh@sina.com 收稿日期:2011年8月26日;修回日期:2011 年9月24 日;录用日期:2011 年9月26 日 摘 要:针对混沌识别过程中,单变量时间序列相空间重构吸引子上 Poincaré 截面的位置难以选择以 及当系统受到不可公约的准周期激励时 Poincaré 截面难以确定等问题,对 Poincaré截面法进行了修正, 即将不可约多频激励条件下满足近邻截面条件的点近似为同截面,且对穿越轨线中同点束进行归一化 处理。仿真和试验结果表明,在不同激励频率以及当试验信号重构吸引子出现轨道簇时,该方法能够 有效地确定Poincaré 截面,观察到了包括多周期、混沌、拟周期振动在内的不同截面图,为实测非线 性时间序列分析提供有益参考。 关键词:Poincaré 截面;轨道簇;混沌 1. 引言 Poincaré 截面法是非线性动力学系统分析中一种 非常有效的方法[1],其主要特点是能将连续系统转化 为对应的离散系统进行分析,并使系统的维数从 n维 减少低至(n – 1)维,从而有效地简化了对高维系统的 动力学特性进行分析[2]。在混沌识别中,Poincaré 截面 图可用来对系统的解进行分类,如轨线与截面只有一 个交点时,表示系统为周期 – 1解;Poincaré 截面图 为一个封闭的圆时,对应 系统为拟周期解;Poincaré 截面图具有明显的层次结构——分形结构时,系统为 混沌解[3-7]。Poincaré 映射法是Melnikov 方法的重要基 础[8]。当截面上同宿点或异宿点的稳定流型和不稳定 流型相交时,系统具有 Smale马蹄意义下的混沌行为。 但传统 Poincaré 映射进行混沌识别的过程中,存在如  刘树勇 等截面法在混沌振动识别中的应用研究109 | Poincaré 下不足:在相空间重构吸引子[9,10]上,Poincaré 截面的 位置选择缺乏有效方法;当系统受到不可公约的准周 期激励时,难以保证不同频率的运动在 Poincaré 截面 上都有截点;在实验信号处理过程中容易出现虚假 Poincaré 截点,导致混沌识别过程中的误判。本文对 Poincaré 截面法进行了改进,解决了不同激励频率条 件下以及在试验信号重构吸引子出现轨道簇时, Poincaré 截面难以确定的问题,为混沌识别提供有益 参考。 2. 改进 Poincaré 截面法 对于动力学系统[11]: , x fx , n x R, (1) l S T 其中,表示 -维环面。 表示周长为 1 1 l l i T l1 S 2 的圆。因此,系统的轨迹在 l-维环面上运动。 Poincaré 截面定义为[12]: 0 ,nl i xRT , I = 1l (2) 因此可以在(l – 1)维环面上研究系统的运动情况。 每隔周期T的时间,系统的轨线就将和 截面相交。 映射 :nn P RR 定义为: 00 , tT Px t (3) 讨论:当 l = 1 时,式(1)表示一个低维系统。它的 轨线在圆周上运动,每隔一个周期和 截面相交一次。 如果映射满足 ** x Px,* x 是一个不动点,它对应于 系统有周期 – 1 解。如果 ** kk1 x Px ( ) 且 1, 1kK * 1 * K x Px,集合 * ,, * K1 x x是一个周期 K闭轨, 它对应于系统有K次谐波解。当 l = 2时,式(1)表示 一个双周期激励的系统,它的轨线在二维环面 11 SS 上运动。假设激励周期分别为T1和T2,系统的行为具 有两种频率成分 1 1T、2 1T。当T1和T2可以相约时, 总存在 kT1 = pT2(k ≠ p ≠ 0)。此时轨线可以出现首尾 相连结的现象。当T1和T2不能相约(准周期激励)时, kT1 + pT2 = 0 的条件是k = p = 0。这时轨线永远不会出 现首尾连结,而是布满整个环面[13]。 考虑环面上的坐标 12 , ,1 对应于周期 T1的 分量, 2 对应于周期 T2的分量。如果固定一个变量1 , 那么截面上的点为 J1: = 12 10 ,: 。同理,如 果固定 2 ,那么截面上的点为 J2: = 12 2 0 ,: 。 假设轨线的形式表示为: 12 , x tF tt (4) 其中, 11 :n F SS R,且: 11 2 2 2mod2 2mod2 tft ft t (5) 映射 P的作用是每隔 T2的时间在 x(t)上采样,得 到: 12 12 22 12 2mod2π 2mod2π 2mod2 0 kT kf f k kT kf f (k = 0,1,) (6) 当T1和T2不能相约时, (k = 0,1,) 12 kT 不是一个周期重复的点,而是在 内任意接近的 点。因此,在这种情况下Poincaré映射点为一个圆。 0, 2π 在具体应用中,Poincaré 截面映射点受到多种情 况的影响,如仿真的步长、激励频率特征等等。如果 不能够采取有效的方法得到合适的Poincaré 截面,将 严重影响该方法对系统动力学特性的描述。对激励频 率而言,当激励频率可约时,可以根据 kT1 = pT2 = T 来确定截面的位置[14]。当两个激励频率不相等时,kT1 ≠ pT2,因此,确定截面位置时遇到的问题是:当以 T = kT1来确定截面时,而另一种频率的运动可能在截面上 没有交点。同理,如果采用 T = pT2来确定截面时,会 出现同样的问题。由于上述原因,在截面选择的过程 中,需要采取特殊处理方法。 选择一个小的 ,如果使得 pT2处于(kT1+ )内, 那么 Poincaré 映射的点由 100 , kkT x xt 组成,其中, k满足: 12 mod, 2kT T (7) 由于存在 ,Poincaré 映射可能不是单一的点 x , 而是包含 x 的一个小的区间段J,且满足 0 lim k J xx (8) 在自治系统中,需要通过空间截取的方式来得到 截面上的点。理论上,截面 Σ在某个位置和轨线相截 Copyright © 2011 Hanspub APP  刘树勇 等 | Poincaré截面法在混沌振动识别中的应用研究 Copyright © 2011 Hanspub APP 110 后,可以得到Poincaré 映射点 ,但是实际应用 0 kk x 率谱图如图 1(b)所示,从图中可以观察到响应具有线 谱特征。系统响应的相平面图如图 1(c)所示,从图中 可以观察到相轨线结构比较简单。Poincaré 截面图如 图1(d)所示,从图中可以观察到 3个离散的点,因此 系统在上述参数条件下产生了周期3响应。 中xk不会准确地处于截面上,而是在截面的 邻域 面内。此外,对于实测信号重构吸引子,受测试环 境、误差等多种因素影响,其轨线具有不完全重合 性,会产生轨道簇,其 Poincaré 截面与仿真信号的 不同之处在于在截面上几乎不会出现单个截点,而 是点束。因此需要根据点束的多少来确定周期解的 性质。此外,每根轨道在相同的周期内不一定返回 到起始点的邻域中,采用以激励周期为单位提取 Poincaré 截面时,可能存在多个截点,因而直接通过 空间截取的方式进行分析是比较合理的。再次,轨 线实际上是由一些离散的点组成,它们和截面的交 点并不总是一定存在,因此将距离截面小于某个值 的点统计在同一截面上。 b) 当系统的参数为 δd = 0.25,γ1 = γ2 = 0.25,ω1 = ω2 = 1,初始条件为(0.5, 0)时,系统响应的时间历程图 如图 2(a)所示,从图中可以观察到响应曲线没有明显 的规律。对其进行功率谱分析,如图2(b)所示,从图 中可以观察到宽谱特征。系统响应的相平面图如图 2(c) 所示,从相图中可以观察到吸引子具有不同于点、极 限环以及环面的特征,是奇怪吸引子。系统响应的 Poincaré截面图如图 2(d)所示,截面图上的点具有分 形结构。利用时间序列最大 Lyapunov 指数的计算方法 可得最大Lyapunov指数 λmax 为0.3714,因此系统产生 了混沌响应。 3. 仿真研究 实际振动系统可能受到多种频率的激励,将多频 率激励振动微分方程无量纲化后得到系统: c) 当系统的参数为 0.25 d ,10.15 ,20.1 11 ,22 ,初始条件为(0.5, 0)时,系统响应的 时间历程图如图 3(a)所示,从图中可以观察到响应曲 线没有明显的规律。对其进行功率谱分析,如图 3(b) 所示,从图中可以观察到明显的线谱成分。系统响应 的相平面图如图 3(c)所示,相图具有一种网状结构, 这主要是由于响应中运动频率不可公约,相轨线在环 面上运动时相互靠近但不重合导致的。所得到的 Poincaré截面图如图 3(d)所示,截面图上的点形成了 一个圆,因此系统产生了拟周期响应。 2 3 1 cos di i xy yxx yt i (9) 其中 d 为阻尼, i 为激励力幅值, i 为激励频 率。当上述参数处于不同的范围时,系统具有不同的 响应。本节对前面研究的 Poincaré 截面法进行仿真, 探讨不同响应的Poincaré截面特征。 a) 当系统参数分别 0.22 d ,12 0.15 , 121 2 0.15 1 ,初始条件为(0.5, 0)时,系统 响应如图 1(a)所示。从图中可以观察到时间历程图具 有明显的周期特征。对响应进行功率谱分析,得到功 4. 试验结果 设计了一个带有反馈控制增益的基于空气弹簧的 Figure 1. Period-3 response of system 图1. 系统的周期 3响应  刘树勇 等截面法在混沌振动识别中的应用研究111 | Poincaré Figure 2. Chaotic response of system 图2. 系统的混沌响应 Figure 3. Quasi-periodic response of system 图3. 系统的拟周期响应 Figure 4. The designed nonlinear vibration system 图4. 设计的非线性振动系统 振动系统,如图 4所示。振动系统由激振器产生具有 一定频率的简谐激励力,由于空气弹簧的非线性特性, 通过调整该系统的参数,可以得到不同的响应。 4.1. 对频谱为线谱的信号进行分析 当空气弹簧的压力为 0.08 Mpa,激励力大小为 30 N,激励频率为 10 Hz,反馈增益为 5时,隔振系统上 层振动加速度响应如图5(a)所示,对其进行频谱分析, 功率谱图如图 5(b)所示,可以观察到该组信号具有明 显的线谱特征,因此可以初步断定系统产生了周期响 应。为了进行相空间重构,利用优化重构参数法计算 得到嵌入维数为5,延迟时间为 3。重构相平面图如图 6(a)所示。从图中可以观察到吸引子具有环状结构, 它不同于不动点和单个的极限环,而是多个环绕叠。 利用 Poincaré 截面方法对其进行详细分析。为了 获得 Poincaré 截面图,选取某个截面与吸引子横截相 交。对于实验信号而言,由于多种因素的影响,轨道 不完全重合,因此吸引子上的轨线比较粗,而且在相 同的时间内,某一点邻域内出发的点,在一个激励周 期内不一定能够返回到邻域中。由于这两个原因的存 在,使得 Poincaré 截面图和仿真数据的所得到的截面 图有所不同:在截面上几乎不会出现单个截点,而是 点束。因此需要根据点束的多少来确定周期解的性质。 同时,由于重构轨线的不完全重合性,它们在相同的 周期内不一定返回到起始点的邻域中,因此采用以激 励周期为单位提取 Poincaré 截面图时,可能存在多个 截点。当这种情况发生时,无法判断点束的个数。采 取图 6(b)所示的截面进行分析是比较合理的选择。然 而由于轨线实际上是一些离散的点组成,和截面的交 点并不总是存在,因此需要将距离截面小于 1 的点仍 Copyright © 2011 Hanspub APP 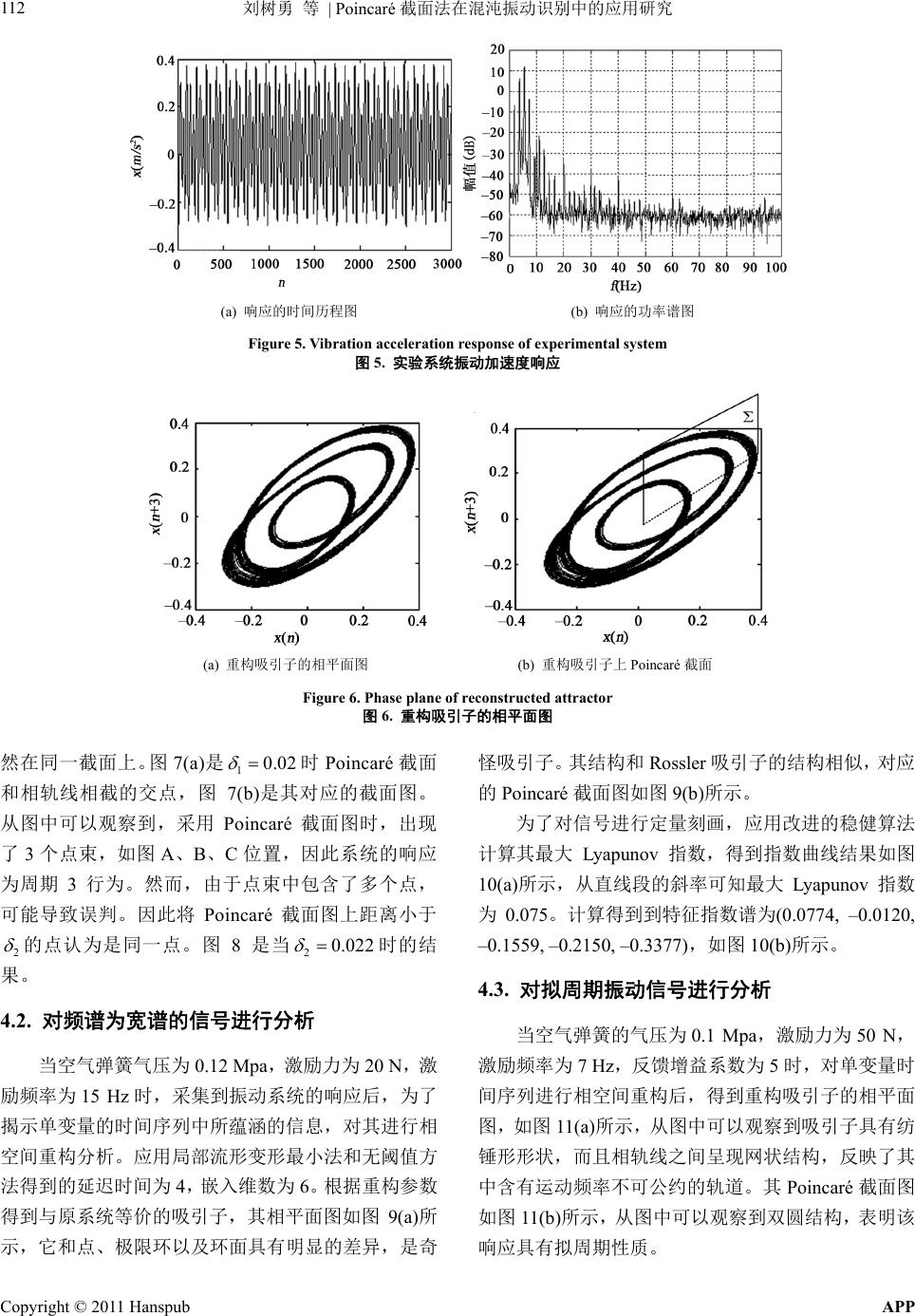 刘树勇 等截面法在混沌振动识别中的应用研究 112 | Poincaré (a) 响应的时间历程图 (b) 响应的功率谱图 Figure 5. Vibration acceleration r e sponse of experimental system 图5. 实验系统振动加速度响应 (a) 重构吸引子的相平面图 (b) 重构吸引子上 Poincaré 截面 Figure 6. Phase plane of reconstructed attractor 图6. 重构吸引子的相平面图 然在同一截面上。图7(a)是10.02 时Poincaré截面 和相轨线相截的交点,图7(b)是其对应的截面图。 从图中可以观察到,采用 Poincaré 截面图时,出现 了3个点束,如图A、B、C位置,因此系统的响应 为周期 3行为。然而,由于点束中包含了多个点, 可能导致误判。因此将 Poincaré 截面图上距离小于 2 的点认为是同一点。图 8是22当20.0 时的结 果。 4.2. 对频谱为宽谱的信号进行分析 结构相似,对应 的P 0.0120, )所示。 4.3. 对拟周期振动信号进行分析 以观察到双圆结构,表明该 响应具有拟周期性质。 当空气弹簧气压为 0.12 Mpa,激励力为 20 N,激 励频率为15 Hz时,采集到振动系统的响应后,为了 揭示单变量的时间序列中所蕴涵的信息,对其进行相 空间重构分析。应用局部流形变形最小法和无阈值方 法得到的延迟时间为 4,嵌入维数为 6。根据重构参数 得到与原系统等价的吸引子,其相平面图如图 9(a)所 示,它和点、极限环以及环面具有明显的差异,是奇 怪吸引子。其结构和 Rossler吸引子的 oincaré 截面图如图9(b)所示。 为了对信号进行定量刻画,应用改进的稳健算法 计算其最大 Lyapunov 指数,得到指数曲线结果如图 10(a)所示,从直线段的斜率可知最大 Lyapunov 指数 为0.075。计算得到到特征指数谱为(0.0774, – –0.1559, –0.2150, –0.3377),如图 10(b 当空气弹簧的气压为 0.1 Mpa,激励力为 50 N, 激励频率为 7 Hz,反馈增益系数为5时,对单变量时 间序列进行相空间重构后,得到重构吸引子的相平面 图,如图 11 (a) 所示,从图中可以观察到吸引子具有纺 锤形形状,而且相轨线之间呈现网状结构,反映了其 中含有运动频率不可公约的轨道。其 Poincaré 截面图 如图 11(b)所示,从图中可 Copyright © 2011 Hanspub APP  刘树勇 等截面法在混沌振动识别中的应用研究113 | Poincaré (a) 未改进 Poincaré 截面与轨道相截的交点 (b) 未改进 Poincaré 截面图上的点束 图7. 未改进的Poincaré 截面图 Figure 7. Poincaré map of experimental signal (a) 改进后 Poincaré 截面与轨线相截的交点 (b) 改进后Poincaré 截面图 上的点 Figure 8. Modified Poincaré map of experimental signal 图8. 试验信号 Poincaré 截面图的改进 (a) 重构吸引子的相平面图 (b) 吸引子的 Poincaré 截面图 图9. 重构吸引子相平面图和 Poincaré 截面图 Figure 9. Reconstruct e d attractor phase plane and Poincaré map Copyright © 2011 Hanspub APP  刘树勇 等截面法在混沌振动识别中的应用研究 114 | Poincaré (a) 最大 Lyapunov指数计算曲线 (b) Lyapunov指数谱曲线 图10. 实验时间序列 Lyapunov 指数曲线图 Figure 10. Lyapunov exponent curves of experimental signal (a) 系统响应重构吸引子相平面图 (b) 吸引子的 Poincaré 截面图 图11. 试验系统的振动加速度响应 5. 结论 caré 截面法进行了改进。当激励频率可约 时, Figure 11. Vibration acceleration response of experimental system 对Poin 可以根据kT1 = pT2 = T来确定截面的位置。当两 个激励频率不相等时,kT1 ≠ pT2,因此,确定截面位 置时存在的问题是:当以 T = kT1来确定截面时,而另 一种频率的运动可能在截面上没有交点。为此,引入 截面邻域,使得 0 lim k J xx ,从而尽量保证了截面 点的存在。实测信号重构吸引子,由于轨线具有不完 全重合性,会产生轨道簇,其Poincaré 截面与仿真信 质。设计了非线性振动实验装置,对研究结果进行了 验证。 6. 致谢 感谢国家自 号的不同之处在于在截面上几乎不会出现单个截点, 而是点束。因此可根据点束的多少来确定周期解的性 然科学基金(51179197),海洋工程国 家重点实验室(上海交通大学)开放课题(1009)资助。 参考文献 . ble-well potential for parametric and external harmonic oscilla- (References) [1] C. N. D. Buckjohn, M. S. Siewe, C. Tchawoua and T. C. Kofane Transition to chaos in plasma density with asymmetry dou- Copyright © 2011 Hanspub APP 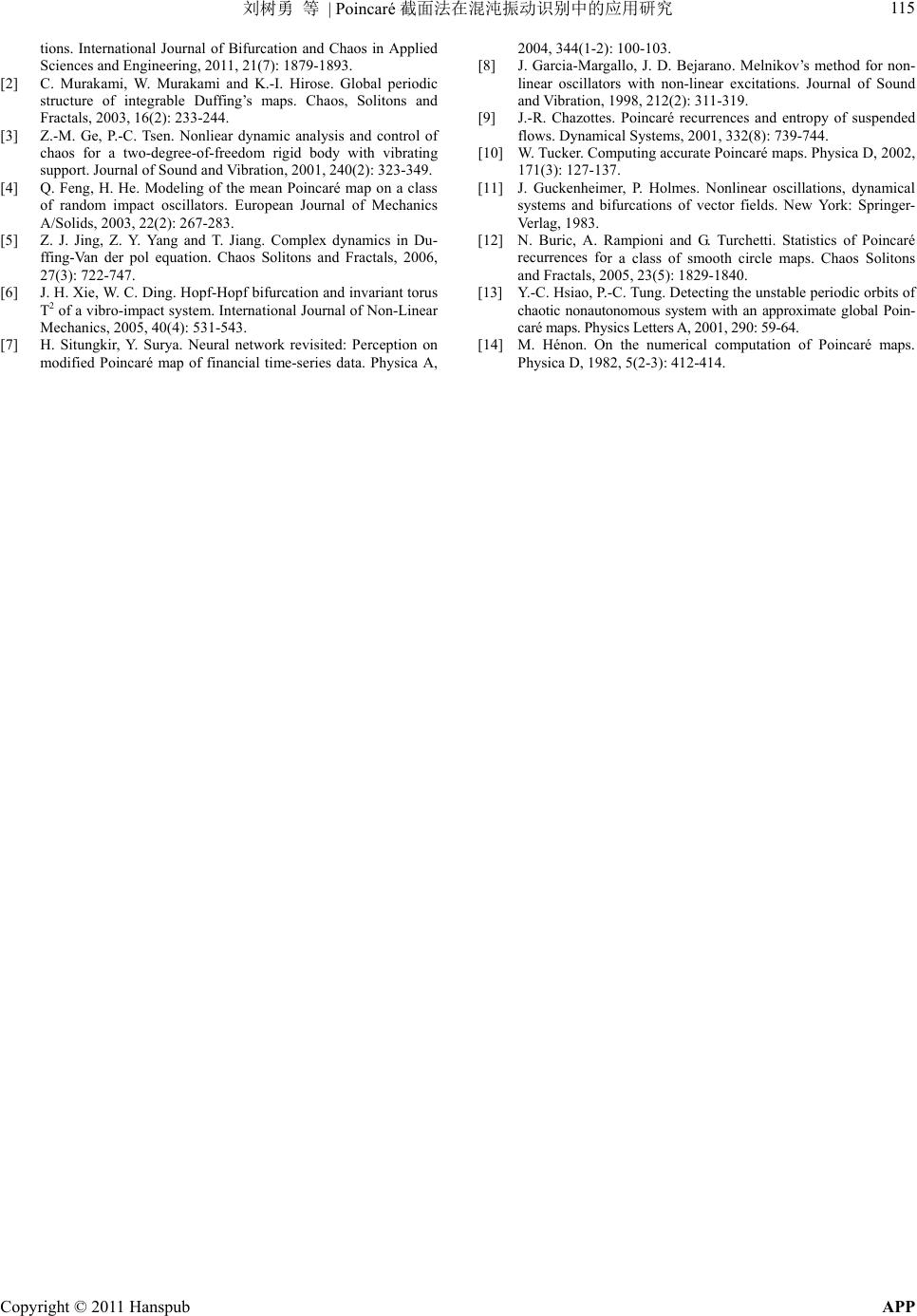 刘树勇 等截面法在混沌振动识别中的应用研究115 | Poincaré ifurcation and Chaos in Applied 21(7): 1879-1893. -linear excitations. Journal of Sound : 739-744. cations of vector fields. New York: Springer- r a class of smooth circle maps. Chaos Solitons approximate global Poin- tions. International Journal of B Sciences and Engineering, 2011, 200 [2] C. Murakami, W. Murakami and K.-I. Hirose. Global periodic structure of integrable Duffing’s maps. Chaos, Solitons and Fractals, 2003, 16(2): 233-244. [3] Z.-M. Ge, P.-C. Tsen. Nonliear dynamic analysis and control of chaos for a two-degree-of-freedom rigid body with vibrating support. Journal of Sound and Vibration, 2001, 240(2): 323-349. [4] Q. Feng, H. He. Modeling of the mean Poincaré map on a class of random impact oscillators. European Journal of Mechanics A/Solids, 2003, 22(2): 267-283. [5] Z. J. Jing, Z. Y. Yang and T. Jiang. Complex dynamics in Du- ffing-Van der pol equation. Chaos Solitons and Fractals, 2006, 27(3): 722-747. [6] J. H. Xie, W. C. Ding. Hopf-Hopf bifurcation and invariant torus T2 of a vibro-impact system. International Journal of Non-Linear Mechanics, 2005, 40(4): 531-543. [7] H. Situngkir, Y. Surya. Neural network revisited: Perception on modified Poincaré map of financial time-series data. Physica A, 4, 344(1-2): 100-103. [8] J. Garcia-Margallo, J. D. Bejarano. Melnikov’s method for non- linear oscillators with non and Vibration, 1998, 212(2): 311-319. [9] J.-R. Chazottes. Poincaré recurrences and entropy of suspended flows. Dynamical Systems, 2001, 332(8) [10] W. Tucker. Computing accurate Poincaré maps. Physica D, 2002, 171(3): 127-137. [11] J. Guckenheimer, P. Holmes. Nonlinear oscillations, dynamical systems and bifur Verlag, 1983. [12] N. Buric, A. Rampioni and G. Turchetti. Statistics of Poincaré recurrences fo and Fractals, 2005, 23(5): 1829-1840. [13] Y.-C. Hsiao, P.-C. Tung. Detecting the unstable periodic orbits of chaotic nonautonomous system with an caré maps. Physics Letters A, 2001, 290: 59-64. [14] M. Hénon. On the numerical computation of Poincaré maps. Physica D, 1982, 5(2-3): 412-414. Copyright © 2011 Hanspub APP |