Journal of Electrical Engineering
Vol.03 No.01(2015), Article ID:14997,7
pages
10.12677/JEE.2015.31004
New Methods of Selecting Capacitor Capacity for Capacitor Starting of Asynchronous Motor
Shunlong Xu1,2, Honggui Lin1,2
1Marine Engineering Institute Jimei University, Xiamen Fujian
2Fujian Province Key Laboratory of Ship and Ocean Engineering, Xiamen Fujian
Email: xu_shunlong@sina.com
Received: Mar. 3rd, 2015; accepted: Mar. 20th, 2015; published: Mar. 26th, 2015
Copyright © 2015 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Asynchronous motor’s capacitor starting can effectively reduce the starting current impact on the power network without reduced starting torque, but the selection of starting capacity is the key. If capacitor capacity is short, the starting current reduction is not obvious. If it is too large, it not only increases the investment, but leads to abnormally high voltage at the motor side and causes a lot of adverse effects. After analyzing the shortcomings of current selection methods, this paper presented two new selection methods, and calculated some sample motors with the MATLAB software to prove the feasibility and usefulness of these methods.
Keywords:Asynchronous Motor, Capacitor Starting, Method of Selecting Capacitor Capacity
异步电动机起动电容容量的选择
许顺隆1,2,林洪贵1,2
1集美大学轮机工程学院,福建 厦门
2福建省船舶与海洋工程重点实验室,福建 厦门
Email: xu_shunlong@sina.com
收稿日期:2015年3月3日;录用日期:2015年3月20日;发布日期:2015年3月26日

摘 要
异步电动机采用电容起动可在不降低起动转矩的同时有效降低起动电流对电网的冲击,但起动电容量的选择是关键。容量不足,则起动电流降低不明显;容量选择过大则不仅增加投入,而且可能在起动末期使电机端部电压异常升高,造成诸多不良影响。本文在分析目前选择方法的不足后,提出两种新的选择方法,并通过MATLAB软件对多台样机进行计算,验证两种选择方法的可行性和效用。
关键词 :异步电动机,电容起动,电容量选择方法

1. 引言
鼠笼式异步电动机起动时在其端部并联三相补偿电容,起动结束后将起动电容切除的方法称为电容起动。异步电动机采用电容起动可以在起动转矩不减小的情况下有效地降低电网提供的起动电流,不仅可减小起动时对电网的冲击,提高功率因数,减小能量损耗。而且对类似船舶电网的有限容量电网,还可减小发电机励磁调节的负担,提高电网的供电质量和运行的可靠性。
早在上世纪70年代,美国就采用电容起动方式起动大容量异步电动机获得成功[1] [2] 。但是电容起动应用的关键是选择合适容量的电容。如果容量选择过小,起动电流仍较大,达不到降低起动电流的目的;如果容量选择过大,则容易使电网的电压异常升高,产生诸多其他不利的影响[3] 。
虽然国内也有人对电容起动方式进行许多有益的尝试[4] ,但都未能给出较成熟的公式和计算起动电容的具体方法。目前较常用的方法主要有1)试算法和2)试验确定法等两种,但这两种方法都不是准确的理想选择方法,且都以补偿率作为选择依据和判断选择是否合适的主要指标。
本文以异步电动机的电路参数及“T形等效电路”为依据,利用MATLAB软件对异步电动机的起动电流进行计算和分析,提出准确选择起动电容的两种新方法,并通过具体电机的参数,对这些方法进行较详细的分析。
2. 确定起动电容的新思路
按起动补偿率确定起动电容就是按异步电动机的起动容量确定补偿电容器的容量,比较流行的做法是按起动容量的50%和100%补偿。
虽然每台电动机的标称容量已知,但由于制造等方面的影响,具体电动机的参数存在差异,容量相同的电机其电路参数实际并不一样,因此起动性能也各不相同。对于不同系列或不同型号的电动机,即使按相同补偿率选择起动电容,在起动过程中它们的无功变化也将有很大的区别,对电网的影响也是不同的。因此按起动容量确定补偿电容器容量是不科学的,也是不准确的。
根据电机学的知识,异步电动机的起动性能可通过其电路参数反映出来[5] ,由这些电路参数构成的“T形等效电路”如图1所示,在等效电路中电机定子一相绕组的总等效阻抗Z1为:
 (1)
(1)
式(1)中, 为异步电动机一相绕组的总等效电阻,
为异步电动机一相绕组的总等效电阻, 为异步电动机一相绕组的总等效感抗。每台电机的电路参数不同,根据等效电路就能对具体电机的起动性能进行有针对性的分析。
为异步电动机一相绕组的总等效感抗。每台电机的电路参数不同,根据等效电路就能对具体电机的起动性能进行有针对性的分析。
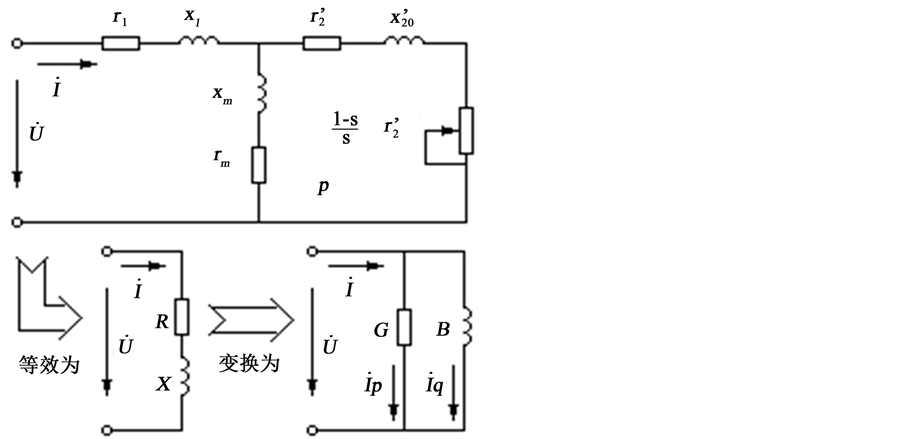
Figure 1. T-Shape Equivalent Circuit of induction motors
图1. 异步电动机“T形”等效电路
为了便于分析,利用阻抗与导纳的变换公式[6] ,可以将式(1)变换为:
 (2)
(2)
式(2)中 为异步电动机一相绕组的总等效导纳,
为异步电动机一相绕组的总等效导纳,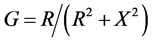 为一相绕组总等效电导,
为一相绕组总等效电导,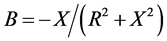 为一相绕组总等效感纳。用等效导纳表示的“T形”等效电路如图1右下角所示。
为一相绕组总等效感纳。用等效导纳表示的“T形”等效电路如图1右下角所示。
变换为导纳表示的等效电路后,异步电动机的起动电流可用有功分量 和无功分量
和无功分量 表示。电源电压一定时,
表示。电源电压一定时, 和
和 的分别由式(2)中的电导
的分别由式(2)中的电导 和感纳
和感纳 决定(
决定( ,
, )。
)。
如果在异步电动机端部并联补偿电容,由于电容的容纳符号正好与感纳符号相反,总电纳数值将减小,起动电流的无功分量 也减小。如果能够将等效电路中的感纳
也减小。如果能够将等效电路中的感纳 全部补偿,则总电纳为0,电源提供的无功电流也为0,异步电动机起动时,总起动电流将只剩下有功电流。此时的总起动电流最小,对电网的冲击也最小。这就是异步电动机电容起动的目的。
全部补偿,则总电纳为0,电源提供的无功电流也为0,异步电动机起动时,总起动电流将只剩下有功电流。此时的总起动电流最小,对电网的冲击也最小。这就是异步电动机电容起动的目的。
问题是式(2)中, 、
、 、
、 和
和 都不仅由电机的具体电路参数决定,还由电机的转差率s决定。也就是说,在电机起动过程中,
都不仅由电机的具体电路参数决定,还由电机的转差率s决定。也就是说,在电机起动过程中, 、
、 、
、 和
和 都是转差率s的函数,都随时转速的变化而变化。因此,要在整个起动过程中满足要求,补偿电容就应根据异步电动机具体的参数进行确定。
都是转差率s的函数,都随时转速的变化而变化。因此,要在整个起动过程中满足要求,补偿电容就应根据异步电动机具体的参数进行确定。
某鼠笼式异步电动机的电路参数为:
 ,
, ,
, ,
, ,
, ,
, ,定子绕组采用D连接。一相绕组参数为:
,定子绕组采用D连接。一相绕组参数为: ,
, ,
, ,
, ,
, ,
, 。由图1所示用导纳表示的等效电路可知:有功电流
。由图1所示用导纳表示的等效电路可知:有功电流 ,无功电流
,无功电流 ,总起动电流为
,总起动电流为 和
和 的矢量和。将上述电机的参数代入这些关系式,通过MATLAB软件仿真,可得到异步电动机起动电流曲线如图2所示。由图2可见,异步电动机起动电流之所以较大,主要是因为其无功电流大,也就是说式(2)中的感纳B较大。而随着电机转速的升高,无功电流减小,则说明电机的感纳减小。由此可知,起动过程中电机的感纳变化很大,而采用电容补偿时,电容的容量是固定不变的。进一步分析可知,在起动过程中有功电流有个最大值,也就是说,不论如何选择补偿电容,在图2
的矢量和。将上述电机的参数代入这些关系式,通过MATLAB软件仿真,可得到异步电动机起动电流曲线如图2所示。由图2可见,异步电动机起动电流之所以较大,主要是因为其无功电流大,也就是说式(2)中的感纳B较大。而随着电机转速的升高,无功电流减小,则说明电机的感纳减小。由此可知,起动过程中电机的感纳变化很大,而采用电容补偿时,电容的容量是固定不变的。进一步分析可知,在起动过程中有功电流有个最大值,也就是说,不论如何选择补偿电容,在图2
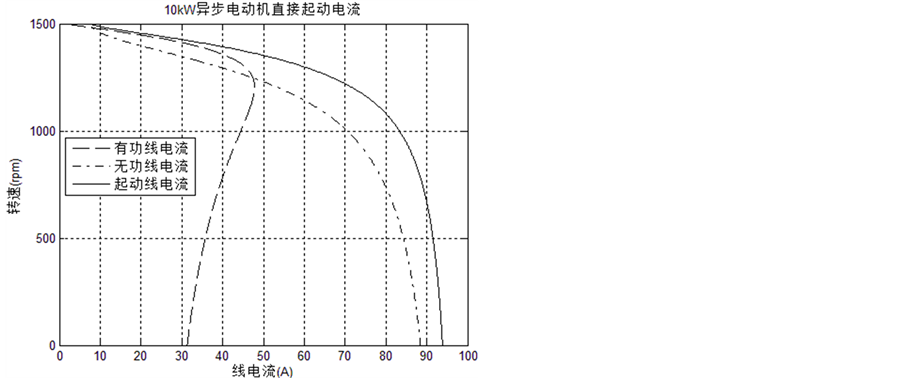
Figure 2. Starting current curves of induction motors
图2. 异步电动机起动电流曲线
所示的有功电流最大值处,起动电流将大于等于有功电流最大值。
因此,选择电容容量时可把着眼点放在这个最大值上。第一个方法是:以电导最大值(即有功电流最大值)时的转差率 为依据,计算对应的感纳(暂且称为临界感纳
为依据,计算对应的感纳(暂且称为临界感纳 )。令每相补偿电容器的容纳值等于临界感纳值,起动时在
)。令每相补偿电容器的容纳值等于临界感纳值,起动时在 处,
处, ,总起动电流将等于有功电流的最大值。
,总起动电流将等于有功电流的最大值。
第二个方法是:既然起动过程中,起动电流将大于等于有功电流最大值。而从图2所示的曲线看,起动瞬间起动电流最大,因此可考虑将起动瞬间的总起动电流控制在有功电流的最大值上。即,起动瞬间补偿电容和异步电动机的等效导纳并联后的总导纳,等于电动机电导最大值。
第二种方法实际计算计算比较复杂,首先要计算电导最大值 ,然后计算起动瞬间
,然后计算起动瞬间 时电机的电导值
时电机的电导值 和感纳值
和感纳值 ,并令补偿后起动瞬间总导纳的模
,并令补偿后起动瞬间总导纳的模 。由于补偿后起动瞬间总电导值
。由于补偿后起动瞬间总电导值 不变,由于
不变,由于 ,可求出补偿后总感纳值的平方
,可求出补偿后总感纳值的平方 。而
。而 ,则每相并联的补偿电容器的容纳
,则每相并联的补偿电容器的容纳 。此外,计算过程中还应注意感纳和容纳的符号不同,即:感纳
。此外,计算过程中还应注意感纳和容纳的符号不同,即:感纳 ,
, ,且
,且 。
。
综上所述,本文提出的选择补偿电容容量的新方法有两个:1) 补偿电容容纳等于补偿前有功电流最大值时对应的感纳。2) 补偿后起动瞬间总相电流的有效值等于补偿前最大有功相电流值。下面分别利用MATLAB软件分析两种方法的起动电流。
3. 补偿电容选择方法分析
3.1. 第一种方法
第一种方法就是以电动机每相绕组的临界感纳值 作为每相并联补偿电容的容纳值
作为每相并联补偿电容的容纳值 。
。
根据前面介绍的方法,需要对每相绕组的电导求最大值。将电动机的电导对转差率s求导,并令所得导数为0,从而得到最大值时的转差率 ,将
,将 代入电导和感纳的表达式后,可得最大电导值
代入电导和感纳的表达式后,可得最大电导值 和临界感纳值
和临界感纳值 。令
。令 ,即可求出每相补偿电容量
,即可求出每相补偿电容量 。
。
但是异步电动机的等效电导的表达式比较复杂,在不借助于计算软件而靠人工直接对其求导并求对应的转差率 实际相当困难。通过进一步的分析可知,最大电导对应的转差率
实际相当困难。通过进一步的分析可知,最大电导对应的转差率 实际就是求解异步电动机机械特性时的临界转差率
实际就是求解异步电动机机械特性时的临界转差率 。因此,可以直接利用简化或近似计算公式求得临界转差率
。因此,可以直接利用简化或近似计算公式求得临界转差率 ,再由式(2)求临界感纳值:
,再由式(2)求临界感纳值:
 (3)
(3)
 (4)
(4)
式(3)为简化计算公式,式(4)为近似计算公式。当然,利用简化或近似计算公式求得的 与
与 存在一定的误差,这将影响补偿电容值的计算精度,从而影响电容启动的性能。
存在一定的误差,这将影响补偿电容值的计算精度,从而影响电容启动的性能。
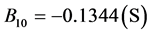
仍然以前面10 kW鼠笼式异步电动机为例,代入具体参数后通过MATLAB软件可求得 ,并代入式(2)求得临界感纳值
,并代入式(2)求得临界感纳值 ,补偿电容量
,补偿电容量 。以式⑶计算的数据为:
。以式⑶计算的数据为: ,
, ,
, ;以式(4)计算为:
;以式(4)计算为: ,
, ,
, 。利用MATLAB软件,可绘制出以方法1补偿后总起动电流变化曲线如图3所示。
。利用MATLAB软件,可绘制出以方法1补偿后总起动电流变化曲线如图3所示。
由计算结果和图2所示曲线可知:
1) 如果能够精确计算出临界转差率 ,并求出临界感纳
,并求出临界感纳 ,令每相补偿电容器的容纳为临界感纳,则采用电容起动后,在异步电动机的整个起动过程中,总起动电流将在45.6770~47.7853(A)之间变化,起动瞬间,电源提供的总起动电流从原来的
,令每相补偿电容器的容纳为临界感纳,则采用电容起动后,在异步电动机的整个起动过程中,总起动电流将在45.6770~47.7853(A)之间变化,起动瞬间,电源提供的总起动电流从原来的 减小为47.1109 A,起动电流下降为原来的50.1961%。
减小为47.1109 A,起动电流下降为原来的50.1961%。
2) 采用简化或近似计算公式求得的临界转差率 比实际的小,异步电动机对应的感纳小,计算出来的补偿电容容量小,因此起动电流比较大。采用简化式计算并补偿时,起动瞬间电流等于54.9957 A,下降为原来的58.5973%。而采用近似式计算并补偿时,起动瞬间电流等于62.1472 A,仅下降为原来的66.2172%。
比实际的小,异步电动机对应的感纳小,计算出来的补偿电容容量小,因此起动电流比较大。采用简化式计算并补偿时,起动瞬间电流等于54.9957 A,下降为原来的58.5973%。而采用近似式计算并补偿时,起动瞬间电流等于62.1472 A,仅下降为原来的66.2172%。
3) 采用简化或近似计算的电容,尤其是采用近似计算的电容,其补偿效果较差,因此需要进行修正。本例简化计算电容量的修正系数约为1.23,近似计算电容量的修正系数约为1.53。
3.2. 第二种方法
第二种方法是使起动电流值等于有功电流的最大值。同样将电机的参数代入,在求得临界转差率 后,根据电导的计算式计算出最大电导为
后,根据电导的计算式计算出最大电导为 ,然后计算起动瞬间电动机的电导和感纳分别为
,然后计算起动瞬间电动机的电导和感纳分别为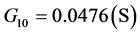 ,
, 。令
。令 ,根据前面介绍的方法,最终可求得每相补偿电容量
,根据前面介绍的方法,最终可求得每相补偿电容量 。
。
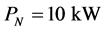
利用简化或近似临界转差率计算的每相补偿电容量分别为:260.5695 (pf)和279.3817 (pf)。利用MATLAB软件绘制的以方法2补偿后总起动电流变化曲线如图4所示。
由计算结果和图4所示曲线可知:
Figure 3. Starting current curves with 1st method
图3. 方法1补偿后的起动电流曲线
1) 采用精确计算的临界转差率,总起动电流将在44.7814~47.9953 (A)之间变化,起动瞬间,电源提供的总起动电流 ,下降为原来的50.9136%,结果与采用方法1差不多。
,下降为原来的50.9136%,结果与采用方法1差不多。
2) 由于采用简化或近似计算公式求得的临界转差率 比实际的小,以其计算的最大电导比实际最大电导小。令它等于起动时的导纳,将比实际导纳小,则所需补偿的电容容量将比实际容量大。因此修正系数应该是小于1的数。本例简化计算补偿电容的修正系数约为0.97,近似计算补偿电容的修正系数约为0.91。
比实际的小,以其计算的最大电导比实际最大电导小。令它等于起动时的导纳,将比实际导纳小,则所需补偿的电容容量将比实际容量大。因此修正系数应该是小于1的数。本例简化计算补偿电容的修正系数约为0.97,近似计算补偿电容的修正系数约为0.91。
4. 选择方法的验证与结论
为了验证上述介绍的选择电容容量的两种新方法,另选择三台容量和频率都不同的鼠笼式异步电动机作为样机,电机主要参数如表1所示,采用方法1和方法2的计算结果如表2所示。
由表2计算结果可以得到如下的结论:
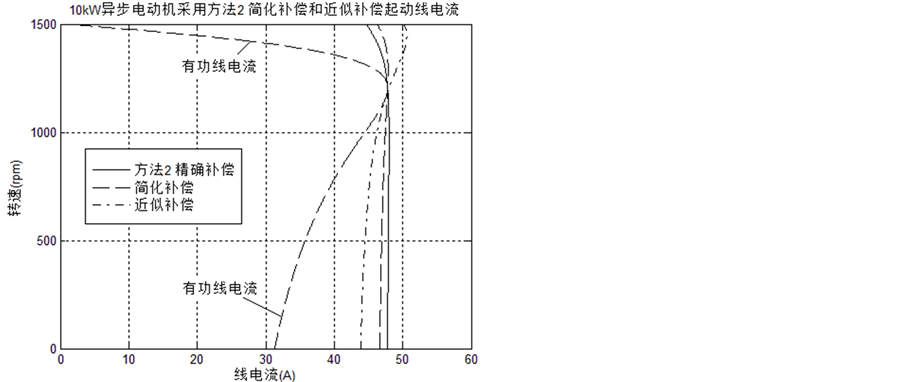
Figure 4. Starting current curves with 2nd method
图4. 方法2补偿后的起动电流曲线

Table 1. The key parameters of squirrel cage induction motors
表1. 鼠笼式异步电动机主要参数
Table 2. The computed results with Method 1 & Method 2
表2. 采用方法1和方法2的计算结果
1) 采用本文提出的两种计算方法,都能够比较准确地计算出合适的补偿电容,使起动电流倍数下降到1.5~3.0之间,并使起动瞬间的功率因数提高1倍左右。
2) 不论采用方法1还是采用方法2计算的补偿电容,都能使异步电动机在整个起动过程中得到接近“恒容量负载”的状态。也就是说,整个起动过程中,起动电流基本不变。
3) 两种方法计算的补偿电容不会出现明显的欠补偿和过补偿。也就是说,在减小电机起动电流对电网冲击的同时,不会在起动结束后由于某种原因不能及时切除起动电容而引起电动机端部电压异常升高。
4) 两种计算方法都要求电机的等效电路参数尽量准确,尤其要求对临界转差率的计算准确。采用简化或近似方法计算的临界转差率,计算得到的补偿电容值与合适值之间存在误差,尤其是采用近似公式计算的临界转差率,误差比较大,需要乘以一个修正系数才能满足要求。因此,应用本文所提出的方法计算补偿电容值时,最好能够根据电动机等效导纳的表达式,求出最大导纳对应的转差率后再计算补偿电容值。
文章引用
许顺隆,林洪贵, (2015) 异步电动机起动电容容量的选择
New Methods of Selecting Capacitor Capacity for Capacitor Starting of Asynchronous Motor. 电气工程,01,24-31. doi: 10.12677/JEE.2015.31004
参考文献 (References)