Journal of Electrical Engineering
Vol.05 No.01(2017), Article ID:19969,9
pages
10.12677/JEE.2017.51004
Design of Speed Control System for PMSM Based on Three-Level Structure
Feng Wu, Qianqian Xu
Key Laboratory of Advanced Process Control for Light Industry, Ministry of Education, Jiangnan University, Wuxi Jiangsu

Received: Mar. 2nd, 2017; accepted: Mar. 20th, 2017; published: Mar. 24th, 2017

ABSTRACT
The three-phase PMSM has a very broad prospect in saving electrical energy. It has the characteristics of simple structure, small volume, high efficiency and good heat radiation. Compared with conventional two-level inverters, three-level inverter has a series of advantages such as low voltage-proof for single transistor, low switching loss and low harmonic content, etc. Therefore, it is of great theoretical significance and practical value to apply the three-level inverter to the speed regulating system of permanent magnet synchronous motor (PMSM). In this paper, the speed regulating system of permanent magnet synchronous motor on the basis of three level neutral point clamped (NPC) inverter is studied. Rotor flux oriented vector control method is applied on the motor. In order to implement the control process, zero sequence voltage injection method is introduced in the proposed three-level inverter control system. With this method, the balance of the neutral point voltage can be well achieved to reduce the harmonic content of the output voltage of the inverter and improve the stator current waveform, which will further minimize the motor torque ripple, and improve motor control performance. The mathematical model and vector control method of PMSM are introduced in this paper, both the topology and commutation mode of three-level inverter with neutral point clamping mode are described, and the neutral point potential balance algorithm and modulation strategy are also analyzed. Finally, the experiment verified the reliability and stability of the system.
Keywords:Three-Level Inverter, Midpoint Potential Balance, PMSM, Vector Control
基于三电平的永磁同步电机调速系统的设计
吴丰,许倩倩
江南大学,轻工过程先进控制教育部重点实验室,江苏 无锡
收稿日期:2017年3月2日;录用日期:2017年3月20日;发布日期:2017年3月24日

摘 要
三相永磁同步电机在节约电能方面具有非常广阔的前景,它具有结构简单、体积小、效率高、易于散热和维护简单等优点。相比传统的两电平逆变器,三电平逆变器具有很多优点:单管耐压低、开关损耗降低、谐波含量小等,因此将三电平技术应用到永磁同步电机调速系统中,具有重要的理论意义和实用价值。本文主要研究了基于三电平中点箝位型(NPC)逆变器的永磁同步电机(PMSM)调速系统。电机采用转子磁场定向的矢量控制。为了达到控制目的,在三电平逆变器控制系统中引入了零序电压注入法。这种方法很好地控制了中点电压的平衡,以期降低逆变器输出电压谐波含量,改善电机定子电流波形,这将减小电机转矩脉动,改善电机控制性能。本文介绍了永磁同步电机的数学模型和矢量控制方法,阐述了中点箝位型三电平逆变器的拓扑结构和换流模式,分析了中点电位平衡算法和调制策略,最后通过实验验证了系统的可靠性和稳定性。
关键词 :三电平逆变器,中点电位平衡,永磁同步电机,矢量控制

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随多电平逆变器是一种新型的逆变器类型,在中点箝位型三电平逆变器的基础上发展起来。通过对传统逆变器主电路拓扑结构的改进,克服了传统逆变器较高的电压和电流上升率所引起的开关应力等缺点,使所有功率器件工作在基频以下,达到了减小开关应力,改善输出波形的目的 [1] - [7] 。
本文在分析NPC三电平逆变器工作原理和永磁同步电动机数学模型的基础上,将基于转子磁场定向的矢量控制策略应用于基于三电平结构的PMSM控制系统中,对控制系统进行硬件设计,由此进行实验及并对结果分析。
2. PMSM的数学模型
为简化永磁同步电机在运行状态时的数学模型,一般假设:1) 对于铁芯忽略磁饱和,不计涡流和磁滞损耗;2) 转子无阻尼线圈,永磁体不产生阻尼作用;3) 在气隙空间永磁体产生无高次谐波、正弦分布的磁势;4) 永磁材料的电导率为零。
三相绕组的电压方程可表示为
 (1)
(1)
式中, 代表x相绕组的全磁链。则磁链方程为
代表x相绕组的全磁链。则磁链方程为
 (2)
(2)
凸装式永磁同步电动机的气隙均匀,定子三相线圈互差120度,互感认为是对称,定子三相线圈是Y形联结,没有中性线引出,故可得磁链方程
 (3)
(3)
可将式(1)转换为矢量方程,即有
 (4)
(4)
将式(3)带入式(4),可得
 (5)
(5)
式中 ,
, 为
为 在ABC轴系内的空间相位,另有
在ABC轴系内的空间相位,另有
 (6)
(6)
上式中,右边第一项为变压器电动势项,由于 为恒值,所以该项为零;第二项称为反电动势项,将式(6)带入式(5)可得:
为恒值,所以该项为零;第二项称为反电动势项,将式(6)带入式(5)可得:
 (7)
(7)
在正弦稳态下的电磁功率为
 (8)
(8)
式中, 为内功率因数角,电磁转矩为
为内功率因数角,电磁转矩为
 (9)
(9)
由上式可以看出,在转矩的矢量控制中,控制的是定子电流矢量 的幅值和相对
的幅值和相对 的空间相对角。
的空间相对角。
3. 三电平逆变器拓扑及其调制方式
3.1. 三电平逆变器的拓扑结构
目前常见的三电平逆变器主要存在以下三种形式:二极管箝位式(NPC)、飞跨电容式和级联式,如图1所示。三电平结构每个功率管电压应力小,谐波含量低,开关损耗低,对电机绝缘体损伤小,主轴电腐蚀小。
3.2. 二极管箝位型三电平逆变器
NPC三电平逆变器拓扑如图2所示,每相有四个功率开关管、四个反并联续流二极管和两个箝位二极管,其中每个功率开关管承受的正向和反向阻断电压为 ,直流侧电压通过两个等值电容分压,一般将两个电容串联的中点定义为中性点。
,直流侧电压通过两个等值电容分压,一般将两个电容串联的中点定义为中性点。
3.3. 三电平逆变器的中点电位平衡问题
三电平中点电位容易受到直流侧电容的误差、负载转矩、功率因数等影响而发生偏移和波动。中点

Figure 1. Common three level inverter structure
图1. 常见的三电平逆变器结构
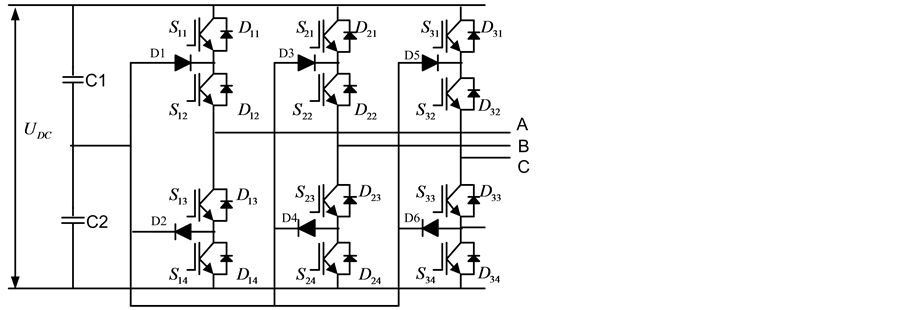
Figure 2. The diode clamped three level inverter
图2. 二极管箝位型三电平逆变器
电位不平衡时,输出波形中含有一定量的低次谐波,输出效率降低,同时电机调速性能由于转矩的波动而变差。
中点电位平衡以注入电荷为切入口定量讨论不平衡。如图3所示,以三电平逆变器A相桥臂为例,输出1电平时,必然要从中点抽取或者向中点灌入一定量的电荷数,这就导致中点电压出现不平衡。这样不平衡问题转化为分析从中点抽取或向中点灌入电荷的大小,即1电平持续的时间。
在三相系统中,假设: ,
, ,
, ,
, ,
, ,此时A相为2电平,B相为0电平,C相为0电平。设一个PWM周期为
,此时A相为2电平,B相为0电平,C相为0电平。设一个PWM周期为 ,三相PWM波形以及各个电平的占空比如图4所示。
,三相PWM波形以及各个电平的占空比如图4所示。
如果注入一个零序分量,为保证不改变三相电压极性,防止过调制,做以下规定 ,
, 。此时从中位点抽取的电荷为:
。此时从中位点抽取的电荷为:
 (10)
(10)
从结果看出,注入零序分量后,向中位点注入的电荷分为两项。一项为实现调制从中位点抽取的电荷,该部分为不可控量;另一项为注入零序分量后从中位点抽取的电荷,为可控量。这样,根据每个周期内的电流正负,可以确定零序分量的正负来实现中位点的调节。

Figure 3. The A phase bridge arm of three phase inverter
图3. 三电平逆变器A相桥臂
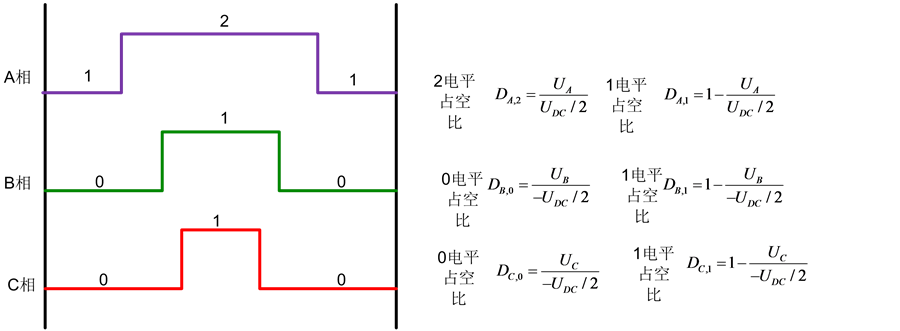
Figure 4. Three-phase PWM waveform
图4. 三相PWM波形
4. 永磁同步电机控制系统的调节器的设计及实现
4.1. 电流内环PI调节器设计
电流环的主要使电流紧紧跟随其外环调节器的输出量;对直流侧电压的波动能够迅速抗扰;在转速动态过程中,保证获得电动机允许的最大电流,从而加快动态过程。图5给出了电流内环的控制框图,图6为电流内环结构框图。
稳定状态时,期待电流没有余差,堵转特性比较理想。实际系统动态情况下要求定子电流动态过程中超调量小于等于允许值,并不严格要求对直流端电压不稳定的快速抗扰特性。因此,内环要求跟随性能好,通过PI调节器校正为I型系统,其传递函数可以写成:
 (11)
(11)
为了让调节器零点与控制对象的大时间常数极点对象对消,令 ,则系统的开环传递函数:
,则系统的开环传递函数:
 (12)
(12)

Figure 5. Inner current loop control block diagram
图5. 电流内环控制框图

Figure 6. Inner current loop structure diagram
图6. 电流内环结构框图
闭环传递函数为:
 (13)
(13)
如果对于系统无特殊系统,一般取阻尼比: 。由闭环传递函数可得:
。由闭环传递函数可得:
 (14)
(14)
计算得到以下结果:
 (15)
(15)
4.2. 转速外环PI调节器设计
转速环的作用主要是增强系统的抗负载能力,抑制速度波动,其输出限幅值决定电动机允许的最大电流。图7给出了转速外环的结构框图。
设转速环PI调节器:
 (16)
(16)
经过计算,可以将除转速环以外的部分等效成一个Ⅰ型系统,其传递函数为:
 (17)
(17)
将两个小惯性环节进行化简得(图9)。
为了能够获得较好的抗扰性能,一般将转速环校正成一个Ⅱ型系统。根据式(18)和式(19)确定转速环PI参数。加大中频宽度h,可以降低超调量,但系统的快速性减弱。一般h值在3~10之间,若h更大时,降低超调量的效果就不明显了。最终h根据实际系统去确定。
 (18)
(18)
 (19)
(19)
系统控制原理框图如图10所示:
5. 实验验证与结果分析
为验证系统的可靠性和稳定性,在实验室搭建了以飞思卡尔DSC为控制核心的实验平台如图11所示:
图12(a),图12(b)分别给出了电机启动和制动过程中相电流、Iq和转速的波形,图13是其对应的电流展开图。从图中可以看出启动过程中相电流增大,达到稳定后空载运行电流很小,转速调节性能良好,直流侧电压略微降低,电机制动过程刚好相反。
图14给出了电机突加突减负载时,相电流、Iq和转速的变化曲线。从图中可以看出突加负载时,相电流和Iq明显增大,电机转速略微降低,调节器作用明显。突减负载时,电流减小,转速突然升高,调节器调节作用明显。

Figure 7. Outer ring structure
图7. 转速外环结构框图

Figure 8. Simplified structure of the block diagram
图8. 化简后的结构框图

Figure 9. The block diagram of the equivalent second order system
图9. 等效二阶系统的结构框图

Figure 10. Control block diagram
图10. 控制原理框图

Figure 11. Experiment platform
图11. 实验平台
 (a) 电机启动 (b) 电机制动
(a) 电机启动 (b) 电机制动
Figure 12. Motor start and brake process
图12. 电机启动、制动过程

 (a) 电机启动(b) 电机制动
(a) 电机启动(b) 电机制动
Figure 13. Start and brake current waveform
图13. 启动、制动电流波形图

Figure 14. The motor suddenly loading and unloading load
图14. 电机突加突减负载
6. 结论
本文在基于转子磁场定向矢量控制的策略下实现对永磁同步电机的控制。文中阐述了永磁同步电机的运用前景及其发展状况,以及现阶段永磁同步电机的控制的主要方法;介绍了永磁同步电机的数学模型和三电平拓扑结构。同时还利用了经典的电流内环和转速外环的电机双环控制理论,以及逆变器的SPWM发波方式等一些永磁同步电机控制理论和电力电子技术方法。在这些理论和方法的指导下,完成了控制系统环路参数设计。搭建了硬件平台,进行了实验,主要完成了电机的双闭环控制实验,电机的调速实验。
文章引用
吴 丰,许倩倩. 基于三电平的永磁同步电机调速系统的设计
Design of Speed Control System for PMSM Based on Three-Level Structure[J]. 电气工程, 2017, 05(01): 25-33. http://dx.doi.org/10.12677/JEE.2017.51004
参考文献 (References)
- 1. 金永顺. 三电平逆变器SVPWM方法的分析与研究[D]: [硕士学位论文]. 长沙: 湖南大学, 2007.
- 2. 肖卫文. 永磁同步电机电磁系统的研究[D]: [硕士学位论文]. 长沙: 湖南大学, 2009.
- 3. Rodriguez, J., Lai, J.S. and Peng, F.Z. (2002) Multilevel Inverters: A Survey of Topologies, Controls, and Applications. IEEE Transactions on Industrial Electronics, 49, 724-738.
- 4. 邵章平. 三电平背靠背变流器系统的关键技术研究[D]: [硕士学位论文]. 合肥: 合肥工业大学, 2011.
- 5. 张志, 谢云强, 等. 一种消除中点电位低频振荡的三电平逆变器载波调制方法[J]. 电力自动化设备, 2010, 30(4): 1-3.
- 6. Nabae, A., Takahashi, I. and Akagi, H. (1981) A New Neutral Point Clamping PWM Inverter. IEEE Transactions on Industry Applications, 17, 518-523. https://doi.org/10.1109/TIA.1981.4503992
- 7. Yuan, X.M. and Barbi. I. (2000) Fundamentals of a New Diode Clamping Multilevel Inverter. IEEE Transactions on Industrial Electronics, 15, 711-718.