Computer Science and Application
Vol.05 No.12(2015), Article ID:16676,10
pages
10.12677/CSA.2015.512057
The Research of High Dimensional Solution Space Adaptation Based on Case-Based Reasoning during Mission Planning
Yuan Zhang, Yudong Qi, Yongjun Qiao, Qinghua Chen
Department of Ordnance Science and Technology, Naval Aeronautical and Astronautical University, Yantai Shandong

Received: Dec. 11th, 2015; accepted: Dec. 27th, 2015; published: Dec. 30th, 2015
Copyright © 2015 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Adaptation is the most difficult stage in the CBR cycle, especially, when the solution space is multi- dimensional in the Command Entity’s Mission Planning. This paper discusses the adaptation of a high dimensional solution space in the Command Entity’s Mission Planning and proposes a possible approach to it. A Visualization induced Self Organizing Map (ViSOM) is used to map the problem space and solution space first, then a Back Propagation (BP) network is applied to analyze the relations between these two maps. A simple military scenario is used as a case study for evaluation purposes.
Keywords:CBR, Multi-Dimensional Solution Space, Adaptation, ViSOM, Mission Planning

任务规划中基于案例推理的高维解空间适应性问题研究
张媛,齐玉东,乔勇军,陈青华
海军航空工程学院兵器科学与技术系,山东 烟台

收稿日期:2015年12月11日;录用日期:2015年12月27日;发布日期:2015年12月30日

摘 要
利用案例推理对指挥实体任务规划过程中决策问题求解方法的修正过程是该方法推理过程中最困难的阶段,尤其当决策问题解空间是多维的情况下。文章讨论了指挥实体任务规划过程中高维决策空间的修正问题,并提出了可行的解决方法。首先利用自组织匹配法(ViSOM)清晰展现问题空间与决策空间的映射过程,然后,利用BP神经网络分析匹配结果间的相关性问题,最后选取一个简化的军事剧情对该方法的合理性进行验证。
关键词 :CBR,多维解空间,适应,ViSOM,任务规划

1. 引言
案例推理法(Case-Based Reasoning, CBR)是一种利用曾经求解过的类似问题来类比映射得到决策问题解的适配方法。其中对决策问题求解方法的修正过程是CBR推理过程中最困难的阶段。
最简单的修正策略是由一系列用于解决新问题与已有案例间差异性与冲突性问题的修正规则构成。为了克服基于规则推理的修正计算所带来的困难和局限性,里克等人[1] 提出了一种转换型修正方法与规则相结合的混合案例修正计算方法,这些规则用于引导实现系统空间中必要的转换。此系统空间中不仅保留着修正过程中的转换操作过程,而且还保持着空间中的每一步搜索痕迹。尽管里克提出的方法功能比较强大,但由于每次仅能实现对一个修正目标的计算,所以仍然存在一定的局限性。另外,这种方法也不太适用于具有有限知识需求能力的CBR系统。这是因为,里克的方法依赖于大量进行明确表示的可用知识,并且无论系统进行修正所需的知识储备是否充足,都依赖于用户的紧密参与。因此,通过分析识别案例及其决策结果之间的差异性,Hanney和Keane [2] 提出了一种在案例库中直接建立修正规则的方法,如果可能的话,这将是一种可行的模式。Jarmulak等人 [3] 基于CBR知识内容的可用性特点也开发了一套修正方案。此方法指出系统空间中的每一个案例都作为测试案例,并将其与案例库中其它与其最相近的案例进行比较。每一种比较过程中,都会构建一种修正方案。这个方案包含了测试案例库与检索案例中问题与决策结果之间的差异性及其描述信息。当新问题产生时,修正案例就会对所提出解决方案的正确性进行估计并提出必要的建议性意见。
上述提到的解决方法都是“知识启发式方法” [4] ,即对CBR系统的自身案例进行修正性学习,并把它们作为知识库建立的来源。这些方法首先对所萃取出的信息进行预处理,再用学习算法对其进行处理。学习过程中必须考虑所调查的问题域及其修正目标的问题。它将预处理信息转换成满足要求的修正决策方案。知识启发式修正方法必须由CBR系统提供足够数量的多种知识来支撑。不充足的知识储备可能会对系统造成负面影响。此外,由学习算法产生的修正知识必须正确,并适当结合已有的修正单元、解析过程,必要的时候也要考虑一下矛盾情况和不相匹配的情况。
许多CBR系统的决策空间只是一维的,例如对财产的估值,或对案例的评估分析等 [5] - [8] 。但是,在利用CBR技术来解决军事行动方案的制定问题(suitable course of action, COA)时,每一行动路线由相应时间所对应的实体位置来表示,因此我们所建立的案例决策空间是一个多维空间。这个多维空间可以简单认为是由若干个单维空间组成,每个单维空间应用相同的方法,然后再将每个单维决策结果进行组合。然而,这种思路可能会认为COA是一个由多个独立决策单元组成的结合体,这明显是错误的。所以,我们提出了自组织匹配(SOM)和ViSOM相结合的案例修正方法以解决类似情况下的案例修正问题。
2. SOM和VISOM
SOM是一种被模式识别、图像分析和误差诊断等广泛领域成功应用的无人监督神经网络算法。基本的SOM算法受到人脑直觉思维模式的启发,通过神经元将感知印象映射到大脑立体空间或形成神经元色质间的立体空间关系。这就是所谓的竞争学习。SOM算法是由两层神经元组成:具有n个输入节点的输入层(表示n维输入向量)和N个输出节点的输出层(表示N个决策范围)。每一个输入节点都与一个输出节点相连接,所有的连接关系都会赋予相关的权重,因此SOM就形成了一个将高维数据整合成低维网格的非线性投影图,基本过程如下:
1) 初始化:随机赋予全部神经元的权重向量值。
2) 相似性匹配:运用角距离公式或欧几里德距离公式。计算模式i与模式j之间的欧几里德距离为:
 (1)
(1)
其中 越小,表示向量就越接近。角距离是基于向量的内积:
越小,表示向量就越接近。角距离是基于向量的内积:
 (2)
(2)
 是向量的欧几里德范数。
是向量的欧几里德范数。
在这里 值越大,向量的相似度就越接近。所以我们就可以发现时间t时最佳匹配值
值越大,向量的相似度就越接近。所以我们就可以发现时间t时最佳匹配值 为:
为:
 (3)
(3)
3) 更新:利用更新公式调整所有神经元的突触权重向量:
 (4)
(4)
其中 表示当前t时刻神经元的学习率;
表示当前t时刻神经元的学习率; 是一个以最佳匹配值
是一个以最佳匹配值 为中心的邻域方程,这个最佳匹配单元和它的邻域都可以通过修正当前输入的参考向量值来对输入进行表示。学习单元的大小由其邻近的影响函数来决定,这个影响函数在映射网格中是一个从最佳匹配单元进行单元距离递减的函数。最大权重的修正过程就是最佳匹配值正向产生的过程,并且根据正向产生过程中节点j和节点
为中心的邻域方程,这个最佳匹配单元和它的邻域都可以通过修正当前输入的参考向量值来对输入进行表示。学习单元的大小由其邻近的影响函数来决定,这个影响函数在映射网格中是一个从最佳匹配单元进行单元距离递减的函数。最大权重的修正过程就是最佳匹配值正向产生的过程,并且根据正向产生过程中节点j和节点 之间的距离,以最佳匹配点为始,直到某一径向距离
之间的距离,以最佳匹配点为始,直到某一径向距离 处,权重修正值经过微调降为0(N中的最大允许距离)。这种效应可以通过高斯函数方便地实现:
处,权重修正值经过微调降为0(N中的最大允许距离)。这种效应可以通过高斯函数方便地实现:
 (5)
(5)
其中 为高斯函数方差,它确定了节点j偏离理想节点的距离d范围。其效果会随着训练时间t的增长而降低。
为高斯函数方差,它确定了节点j偏离理想节点的距离d范围。其效果会随着训练时间t的增长而降低。
为了加快计算的速度,可以使用Λ函数,这个函数规定在半径r范围内的神经元只能进行恒等的正向权重改变。
4) 延拓:在过程2)执行基础上,通过训练过程中对参数η和Λ进行动态计算,直到其没有显著变化为止。学习进程开始时,邻域的半径是相当大的,但它会随着学习过程的开展而有所收敛。这保证了学习开始时就对全局次序进行确定,随着过程的结束,半径变得越来越小,匹配表中模型向量的局部修正过程将更具体。
SOM算法最重要的典型特征就是保持映射过程的拓扑性。Bauer和Pawelzik [9] 和Kohonen等人 [10] 采取各种测量方法,将高维数据映射到低维特征图(一维或二维特征地图),同时文献 [11] 和文献 [12] 也相继提出了提高SOM算法的拓扑可维护性方法。然而,SOM算法不会一直可靠地描述数据及其结构分布,因此需要采取一些措施来计算特征图的质量以便得出最好结果。平均量化误差表示矢量数据与其原型之间的平均距离。一般来说,当特征图的尺寸增加时,就需要有更多的单元来对其数据进行表示,因此每个数据向量越会更接近其最佳匹配单元,从而两者之间的平均量化误差就会越小。
ViSOM使用与标准SOM类似的网格结构,两者的不同之处在于前者更新理想点邻域中神经元权重值的方式如方程(6)所示。
 (6)
(6)
其中 是邻域函数,而ViSOM利用公式(7)对理想点邻域中神经元权重值进行更新:
是邻域函数,而ViSOM利用公式(7)对理想点邻域中神经元权重值进行更新:
 (7)
(7)
其中 为时间t时理想神经元的权重值;
为时间t时理想神经元的权重值; 为输入空间中神经元
为输入空间中神经元 和神经元
和神经元 间的距离;
间的距离; 为特征图中神经元
为特征图中神经元 和神经元
和神经元 间的距离;
间的距离; 为预先指定结论参数的相对值。这个值越小,表明得到的特征图决策质量越高。
为预先指定结论参数的相对值。这个值越小,表明得到的特征图决策质量越高。
ViSOM的关键特征在于特征图中神经元之间的距离可以反映出原始数据空间对应点间的距离。我们在案例问题空间及其决策空间中都采用了ViSOM理论。一旦这两类空间中都采用ViSOM算法,那么案例问题空间中的案例位置就是ViSOM算法的输入,决策空间中相应案例的位置就是ViSOM算法的输出。由于位置变量是一个二维向量,因此BP网络结构比直接输入原数据库所采用的BP网络结构简单的多。这种方法试图分别模仿问题空间作为输入模型和决策空间作为输出模型的过程,并且通过调整连接权重值的大小将问题与其决策结果关系相映射。
ViSOM算法的输入为案例问题空间中每对案例位置间的位置差异,而非实际位置点。同样,案件决策方案中同一案例对间的位置差异作为ViSOM算法的输出。目标案例与其最相似案例间的区别经过训练后作为神经网络的输入。同样得到决策空间特征表中目标方案的位置信息。
由于ViSOM算法保留着特征图中输入数据各点间的距离信息,因此离目标案例最近的案例就是所采用的目标案例决策结果。在实验中,我们采用了一个三层BP神经网络,此神经网络由2个元素构成输入向量,5个神经元构成隐藏层以及2个神经元构成输出层组成, 函数作为各层间的传递函数,训练过程采用适用于小型神经网络的快速训练方法——trainlm算法(莱文博格–马夸特算法)。
函数作为各层间的传递函数,训练过程采用适用于小型神经网络的快速训练方法——trainlm算法(莱文博格–马夸特算法)。
3. 目标案例解的求解
在获得ViSOM案例决策空间中目标案例的位置后,如果同一位置没有预期存在的案例信息,那么这个案例的决策方案就作为目标决策结果。如果同一位置不只存在一个预期案例,那么这些预期案例决策结果的平均值就是目标案例的决策结果。但是,当在这个位置上没有预期案例存在时,我们采取下几种可能的解决方式从相应高维决策方案中寻找准确决策结果的位置:
首先,建立ViSOM案例解空间中对应节点的向量原型。一旦对ViSOM解空间进行训练,解空间中每一个节点都会有其对应的原型向量。当ViSOM解空间中目标案例的位置已知时,对应节点就可能成为目标案例解的理想节点,并且此节点的权重大小可能对输出结果具有一定的影响。
其次,使用反向距离加权的KNN算法。需要注意的是,此算法使用的是目标案例位置间的距离和决策空间特征图中的相邻距离,而非问题空间中的距离。
4. 实验设计
我们将一个COA表示作战兵团中一个作战指挥官,选取MAK VR-Forces软件作为我们的仿真环境。通过利用VR-Forces软件中实体的位置及其到达此航路点所对应的时间来表示一个COA的决策制定过程。换句话说,一个COA是由一个相当于人类指挥官指挥过程公式化表示的同步矩阵进行表示的。其中,矩阵是由仿真过程中不同时间段上所对应的实体航路点组成:其中行表示实体,列表示时间段。
文中,利用VR-Forces软件产生一个剧情作为测试实例。剧情设计为四个敌方坦克(BMP 1, 3, T80, BMP2, BMP2和2)部署在一个雷区后面。我方用三个排(每排拥有4辆坦克,分别用蓝排,红排和白排进行标识)对敌方坦克进行压制,同时安排两个工程车辆进行扫雷。
作战想定如图1所示。
攻防剧情描述场景为:
蓝排原地待命,随时准备向敌军开火;红排向红色路线点挺进,为工程兵排雷提供掩护;白排向白色路线点挺进,为工程兵排雷提供掩护;工程兵紧随红排其后,当红排到达红色路线点,并且敌军被摧毁后,工程兵挺进雷区进行排雷。
4.1. 情景描述
在有关CBR系统军事案例中,案例来自于实战训练科目安排,先验知识,战术及其作战条例 [13] 。根据领域知识和经验,任务,敌人,地形,部队,和时间(METT-T)通常是人类指挥官真实作战过程中考虑的因素。本剧情中,在保持突破雷区任务不变的情况下。为了简化剧情的表示形式,本项目中不需要对任务进行描述,只是由一个符号对象来每个实体进行表示。即使这样,也仍然无法比较敌对双方的能力大小。因此我们对每组兵力采取综合表示而非分别表示的方式,利用可以采用简化的方式,根据其兵力比例等级来表示其能力大小。例如,T80坦克的能力为5,M1A2的能力为6,BMP2的能力为3。同时,把战斗效能认为是一组有序数据而非符号。因此,“全能”用1表示,而“无法使用”用0表示和“退化”用0.5表示。然后兵力比例等级由公式(8)给出:
 (8)
(8)

Figure 1. Breaching scenario
图1. 攻防剧情
其中 为友方兵力第
为友方兵力第 队的能力,
队的能力, 表示友方兵力第
表示友方兵力第 队的战斗效能。
队的战斗效能。 为第
为第 个敌方兵力的能力,
个敌方兵力的能力, 表示第
表示第 个敌方兵力的战斗效能。
个敌方兵力的战斗效能。
VR-Forces仿真过程中,整个仿真战场中实体的位置都使用网格坐标系中(x,y)网格信息来表示一个实体的位置,不在网格单元中心的实体将被分配到最近的网格单元上。
我们用矩阵存储所有实体的网格信息。如果某一网格单元中没有实体,我们就将这个网格单元位置赋予0;否则表示此网格单元存有实体。表1中,我们在仿真战场中产生实体a和实体b,定义相应的矩阵为:
对于每一实体的数据表示方式主要有两种,一种为分类数据的表示方式,另一种为数据的表示方式。例如有两种敌方实体:BMP2和T80。每类实体的数量可能有所不同。若采用分类数据的表示方式,假设用1代表BMP2,用2代表T80。那么敌方兵力就可以用一个含有0,1,2三种元素构成的矩阵来表示。若采用数据的表示方式,那么实体的位置就可以根据其在坐标系中的位置来进行存储。例如,实体A = (3,2)和B = (5,4)的表示如表1所示。
第二种方法更适合表示实验方案中的友军信息。假设友军部队主要有四个角色组成:蓝排,红排,白排和工兵。为了简化决策的过程,文中忽略了案例表示中的时间,采用(X,Y)两维坐标进行表示友军部队兵力的位置(假设地形是确定的,并且每一兵力同时到达每一航路点)。表2显示了此剧情中对所有实体兵力的表示。

Table 1. Grid representation
表1. 网格表示
Table 2. Scenario representation
表2. 剧情表示
4.2. 案例决策
正如前面所讨论的,COA可以用剧情中由不同时间步长所对应实体的航路点位置所构成的矩阵来进行表示:每一行对应一个实体,每列对应一个时间步长。对于这个简单的剧情,我们使用案例所描述的四个路线来表示决策部分:蓝排路线,红排路线,白排路线和工兵路线。每条路线由相应时间段的五个航路点组成,包括开始点和结束点,每个航路点由X和Y两维坐标进行表示,如表3所示。
4.3. 数据收集
为了收集案例数据库的输入数据,我们随机对300个案例进行描述,其中随机产生的案例值包括兵力比例能力初始值以及敌我双方的位置初始值。然后根据每个案例的描述,选取一个具有通用感知能力的COA并用VR-Forces软件对其进行仿真。进而对作战目的是否达到、敌方剩余(开火)力量和友军的剩余力量等结果进行记录。选取上述影响因素中具有最大权重W值的COA作为最合适的解决方案。
 (9)
(9)
其中, 是领域知识定义的权重;
是领域知识定义的权重; 表示目的是否达到;
表示目的是否达到; 表示友军剩余力量;
表示友军剩余力量; 表示敌军剩余力量。
表示敌军剩余力量。
因为本剧情不可能穷举所有部署情况下的所有敌方计划,因此他们的路径也可以改变。我们需要选择不同情况下,覆盖了大部分剧情变化情况下的案例。图2和图3显示了两个例子。
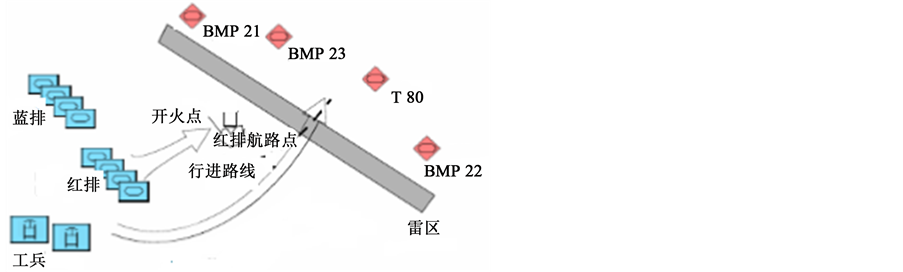
Figure 2. Breaching exercise variation 1 (White platoon is missing)
图2. 缺省情况下的练习变化1(白排没有参加行动)
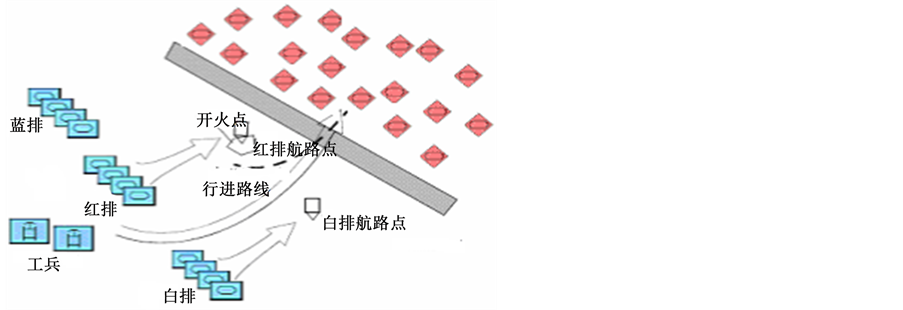
Figure 3. Breaching exercise variation 2 (Enemy firepower is stronger than that of the friendly troops)
图3. 缺省情况下的练习变化2(敌人的火力比友方军队火力强)
Table 3. Troops section route representation
表3. 军队行进路线表示
5. 评估
由于缺乏大量的军事决策支持系统,甚至基于不同剧情数据的类似项目支持也很少,所以确立一个应用标准就变得很困难。领域专家的评估方法是最直接的一种方式,如军事方面的资深专家(SME)。我们可以对评估案例进行图灵测试,进而结合SME的建议进行相应输出结果的比较。一个比较实际的方法就是利用VR-Forces软件对所生成的COA进行仿真模拟,以发现是否对应的COA是否能够帮助友军部队达成他们的作战目标的,并将反馈结果反向输入到系统中以提高系统的学习能力。
我们将案例库中的300个案例分为两组:一组用于训练,另一组用于评估。训练组中的案例作为ViSOM和BP神经网络训练系统的输入,同时评估组中的案例用于判断训练组输出结果的优劣。
实验中所选取的案例是按照2:1的比例进行划分的。因此,随机抽取200例作为训练集,其余100例组成评估集合。评估过程重复10次,结果如表4所示。其中,平均误差(ME)就是这100个案例中COA的预测值与其真实值间欧几里德方差的均值。方差的标准化过程就是将这些平均误差与其真实COA计算结果的模相除,得到的结果就是平均百分比误差(MPE)。
表4中LockKNN一行显示的是通过使用不同规模特征图中的实体位置训练BP神经网络,再利用KNN方法(K值不同)得到决策方案的过程来获取的ME和MPE值。LocProto行显示的是通过使用不同规模特征图中的实体位置训练BP神经网络,再利用特征原型向量得到决策方案的过程来获取的ME和MPE值;DifKNN一行显示的是通过使用不同规模特征图中实体间位置的差异性训练BP神经网络,再利用KNN方法(K值不同)得到决策方案的过程来获取的ME和MPE值;DifProto一行显示的是通过使用不同规模特征图中实体间位置的差异性训练BP神经网络,再利用特征原型向量得到决策方案的过程来获取的ME和MPE值。
表5显示了上述所讨论方法的ANOVA结果,其中 ,
, 。因此,表4所显示结果的差异性在统计上是不明显的。
。因此,表4所显示结果的差异性在统计上是不明显的。
从表4中的计算结果可以看出,采用位置差异性训练BP神经网络,特征图原型获得的结果最好;相反,采用特征图中实体位置训练BP神经网络,KNN算法得到的决策结果最差。这是因为位置间的差异性比单一位置本身含有更多的信息,并且使用位置间差异性进行网络训练也增加了训练样本的大小。此外,使用决策方案中的特征模型向量过程中,必须考虑整个决策空间,而非只考虑其最近邻域。
6. 结论
军事应用问题的研究与开发是一个难度程度非常大的工程。由于CBR方法是一种模仿人类思维过程
Table 4. Experimental result for all the methods discussed
表4. 所有方法的试验结果
Table 5. ANOVA result of different approaches
表5. 不同方法的ANOVA结果
ANOVA: 单因素(single factor)
总结(summary)
ANOVA
的计算方法,因此,在军事剧情中使用CBR方法模拟COA的决策过程是十分合理的。但是,COA的决策空间是一个多维空间,并且决策仿真过程中选取的案例不可能穷举所有情况,因此案例的选取又具有有限性。针对上述情况,本文提出了一种解决高维案例空间中有限案例之间的适应性问题。首先将问题空间和决策空间分别映射到两种不同的ViSOM中,然后分析这两类映射空间之间的映射关系,最后选取一个简单的军事剧情作为实例进行效果验证,取得了理想的效果。虽然案例数据库中所有的案例属性都具有数值,但是非数值属性也可以先转换为数值再被使用。因此,我们的方法可以应用于其他数据库中。但是必须指明的是,这项研究只是一个概念论证方面的尝试,并且今后工作中还有许多需要改进提高的方面。
基金项目
国家自然科学基金。
文章引用
张媛,齐玉东,乔勇军,陈青华. 任务规划中基于案例推理的高维解空间适应性问题研究
The Research of High Dimensional Solution Space Adaptation Based on Case-Based Reasoning during Mission Planning[J]. 计算机科学与应用, 2015, 05(12): 454-463. http://dx.doi.org/10.12677/CSA.2015.512057
参考文献 (References)
- 1. Leake, B., Kinley, A. and Wilson, D. (1996) Acquiring Case Adaptation Knowledge: A Hybrid Approach. Proceedings of the Thirteenth National Conference on Artificial Intelligence, AAAI Press, Menlo Park.
- 2. Hanney, K. and Keane, M.T. (1997) The Adaptation Knowledge: How to Easy It by Learning from Cases. Proceedings of the Second International Conference on Case-Based Reasoning, Springer, Berlin, 359-370.
- 3. Jarmulark, J., Craw, S. and Rowe, R. (2001) Using Case-Base Data to Learn Adaptation Knowledge for Design. Proceedings of the Seventeenth IJCAI Conference, Morgan Kaufmann, San Mateo, 1011-1016.
- 4. Wilke, W., Vollrath, I., Althoff, K.D. and Bergmann, R. (1997) A Framework for Learning Adaptation Knowledge Based on Knowledge Light Approaches, Proceedings of the Fifth German Workshop on Case-Based Reasoning.
- 5. 段美美, 于本海, 朱荫. 基于CBR的软件项目成本估算方法[J]. 计算机工程与设计, 2014, 35(11): 3837-3844.
- 6. 李蕾, 祁慧敏, 杨凤霞. 基于案例与模糊推理的中医诊断系统研究[J]. 信阳师范学院学报(自然科学版), 2014, 27(4): 585-588.
- 7. 董磊, 任章, 李清东. 基于模型和案例推理的混合故障诊断方法[J]. 系统工程与电子技术, 2012, 34(11): 2339-2343.
- 8. 任章, 李清东, 董磊, 等. 基于案例推理和等价空间的定性/定量混合诊断故障方法[J]. 南京航空航天大学学报, 2011, 43(5): 87-90.
- 9. Bauer, H.U. and Pawelzik, K.R. (1992) Quantifying the Neighbourhood Preservation of Self-Organizing Feature Maps. IEEE Transactions on Neural Networks, 13, 570-579. http://dx.doi.org/10.1109/72.143371
- 10. Kohonen, T. (2001) Self-Organizing Maps. Vol. 30 of Springer Series in Information Sciences, 3rd Edition, Springer- Verlag, Berlin Heidelberg. http://dx.doi.org/10.1007/978-3-642-56927-2
- 11. Kirk, J.S. and Zurada, J.M. (2000) A Two-Stage Algorithm for Im-proved Topography Preservation n self-Organizing Maps. IEEE International Conference on Systems, Man, and Cy-bernetics, IEEE Service Center, 4, 2527-2532. http://dx.doi.org/10.1109/icsmc.2000.884373
- 12. Su, M.C. and Chang, H.T. (2001) A New Model of Self-Organizing Neual Networks and Its Application in Data Projection. IEEE Transactions on Neural Networks, 12, 153-158. http://dx.doi.org/10.1109/72.896805
- 13. Pratt, D.R. (2001) Case Based Reasoning for the Next Generation Synthetic Force. Technical Report SAIC-01/7836&00, Science Applications International Corporation, Orlando.