Operations Research and Fuzziology
Vol.07 No.02(2017), Article ID:20745,11
pages
10.12677/ORF.2017.72008
Simulation Research on Application of T-S Fuzzy Delay Model in Truck Trailer Control System
Xingwang Liu*, Cheng Gong, Zijian Chen, Jie Deng, Xinyu Bao
The School of Mathematical Science, Heilongjiang University, Harbin Heillongjiang

Received: May 9th, 2017; accepted: May 24th, 2017; published: May 27th, 2017

ABSTRACT
The research on truck trailer reversing control system is currently a widespread engineering technical problem. Based on the Lyapunov-Krasovskii function method, linear matrix inequality (LMI) and parallel distributed compensation (PDC), this paper establishes a model of truck trailer reversing system based on T-S fuzzy delay model, and forms a linear matrix inequality (LMI). The delay-dependent state feedback controller is given to the robust stability of the truck trailer reversing system and the control performance index. The simulation results of the model verify the effectiveness of the design.
Keywords:Truck Trailer Reversing, T-S Fuzzy Time-Delay System, Lyapunov Function, Linear Matrix Inequality
T-S模糊时滞模型在卡车拖车控制系统中 的应用仿真研究
柳兴旺*,巩 诚,陈子健,邓 劼,包新宇
黑龙江大学数学科学学院,黑龙江 哈尔滨

收稿日期:2017年5月9日;录用日期:2017年5月24日;发布日期:2017年5月27日

摘 要
卡车拖车倒车控制系统研究目前是广泛存在的工程技术性问题。本文利用Lyapunov-Krasovskii函数方法和线性矩阵不等式(LMI)、平行分布式补偿技术(PDC)等技术,建立基于T-S模糊时滞模型下的卡车拖车倒车系统模型,形成以线性矩阵不等式(LMI)的形式给出的实现卡车拖车倒车系统鲁棒稳定性,同时具有控制性能指标的时滞依赖状态反馈控制器。其模型的仿真结果验证了设计的有效性。
关键词 :卡车拖车倒车,T-S模糊时滞系统,Lyapunov函数,线性矩阵不等式

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
卡车拖车倒车控制系统是一个比较复杂的非线性控制系统,其过程是利用卡车为动力源,以卡车和拖车间连杆为纽带,通过动力卡车的倒车运动将无动力的拖车和连动的卡车运动到指定的位置或路线上。
有国内外诸多专家学者应用了不同的技术方法研究了卡车拖车倒车控制问题 [1] 。而学者Hua O. Wang和日本学者Tanaka在通过结合过去经验,应用T-S模糊控制理论,系统地研究了卡车拖车倒车控制系统问题。在实际的现实生活中,信号干扰和时滞阻碍的现象广泛存在,这不仅会影响系统要素和性能特征,干扰正常的系统使用及其效能的发挥,甚至会在某种程度上影响系统的运行稳定性,造成系统的突然崩溃。因此,这种现象对卡车拖车倒车控制的影响及如何应对就成为目前研究卡车拖车倒车控制问题的一个主要方向。
我们拟应用一些新的T-S模糊时滞系统的成果,基于平行分布式补偿技术(PDC)以线性矩阵不等式(LMI)的形式得到一个卡车拖车系统控制器设计。该设计在优先保证了卡车拖车倒车系统的鲁棒稳定性的前提下,将作为给定条件的 控制性能指标实现。能以较好的效果和效率实现卡车拖车运动到指定的位置或路线上的控制目标。
控制性能指标实现。能以较好的效果和效率实现卡车拖车运动到指定的位置或路线上的控制目标。
2. T-S模糊时滞模型及控制器的基本思想
T-S模糊控制系统及其相关理论是由学者Takagi和Sugeno在结合前人研究与当时研究进展的情况下,提出的一种新型模糊模型形式,其特点是:它的模糊规则前件部分与以前的模糊控制规则情况相同,而后件却不是以前普遍使用的模糊语言变量 [2] ,而是将其变为相关输入变量的线性相关的形式,这可以视为是对模型分段线性化的有力扩展,可用来表述一类非常广泛的和动态非线性系统瞬一,比较适合于对基于模型的控制系统研究及其稳定性分析 [3] 。模糊IF-THEN规则语言是当前一般情况下T-S模糊控制理论所广泛使用的基本描述语言。相对于其他控制理论,它能够通过针对整体中的后件部分地表达非线性复杂系统的输入输出关系。T-S模糊控制理论模型的第i个规则应该如下:
IF-THEN规则: :IF
:IF  is
is  and
and  is
is ,...,and
,...,and  is
is 
THEN ,
, (1)
(1)
其中: 是模糊系统的第
是模糊系统的第 条规则
条规则 ,
, 是模糊规则的数目。
是模糊规则的数目。 ,
, 是前提变量,
是前提变量, ,
, 分别是状态变量和控制变量。式中
分别是状态变量和控制变量。式中 是模糊集合,
是模糊集合, 是状态向量,
是状态向量, 是控制输入向量,
是控制输入向量, 是模糊推理规则的个数,通过应用单点模糊化理论、乘积推理和中心加权反模糊化及相应的数学化推理方法 [2] ,可得全局模糊系统模型
是模糊推理规则的个数,通过应用单点模糊化理论、乘积推理和中心加权反模糊化及相应的数学化推理方法 [2] ,可得全局模糊系统模型

式中 ,
, ,
, ,
, 是
是 在模糊集合
在模糊集合 中的隶属度数,
中的隶属度数, ,
, ,
, 。
。
通过数学变换,可以得到如下的随机连续T-S模糊时滞系统:
 (2)
(2)
假设前提变量不依赖到输入变量 ,
, 则可以是可测前提变量。
则可以是可测前提变量。 是一个有效的时滞常数。
是一个有效的时滞常数。 是模糊集。
是模糊集。 是状态变量 [1] ,
是状态变量 [1] , 是其中IF-THEN模糊规则的数量,
是其中IF-THEN模糊规则的数量, 作为控制输入变量。
作为控制输入变量。 作为干扰输入变量,并且我们假设
作为干扰输入变量,并且我们假设 。
。 为有界时滞函数,其导数满足下式:
为有界时滞函数,其导数满足下式: 。
。 为状态的初始值,连续函数。矩阵为不确定系统矩阵 [4] ,表示系统的随机性。
为状态的初始值,连续函数。矩阵为不确定系统矩阵 [4] ,表示系统的随机性。
通过应用平行分布式补偿技术(PDC)来设计T-S模糊系统的 控制器 [1] ,利用模糊控制率来设计模糊状态反馈控制器形式 [5] 如下:
控制器 [1] ,利用模糊控制率来设计模糊状态反馈控制器形式 [5] 如下:
Rule : IF
: IF  is
is  and....
and....  is
is ,THEN
,THEN ,
, .
.
因此,总体状态模糊反馈控制率被表示为
 (3)
(3)
其中 是局部控制变量。模糊控制器的设计方法需要确定反馈局部控制变量
是局部控制变量。模糊控制器的设计方法需要确定反馈局部控制变量 ,进而使得闭环系统对于任何一个
,进而使得闭环系统对于任何一个 渐近稳定。考虑具有
渐近稳定。考虑具有 的T-S 模糊系统(2)和关联反馈控制率(3),则可以得到如下表示的闭环控制系统结果:
的T-S 模糊系统(2)和关联反馈控制率(3),则可以得到如下表示的闭环控制系统结果:
 ,
,  ,
, ,
, .
.
这一理论丰富了当前控制系统理论的层次性,大大扩展了模糊控制系统在现实生活生产中的应用,特别是应对复杂非线性系统控制方面。特别是T-S模糊控制系统的IF-THEN模糊规则的后件表现为线性组合模型的形式,使得T-S模糊控制系统成为研究非线性系统的有力工具。
3. 基于T-S 模糊时滞模型的卡车拖车倒车系统模型及 控制器设计
控制器设计
3.1. 基于T-S模糊模型的卡车拖车系统模型
一般连续时间状态下的卡车拖车系统模型,如图1所示:
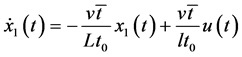


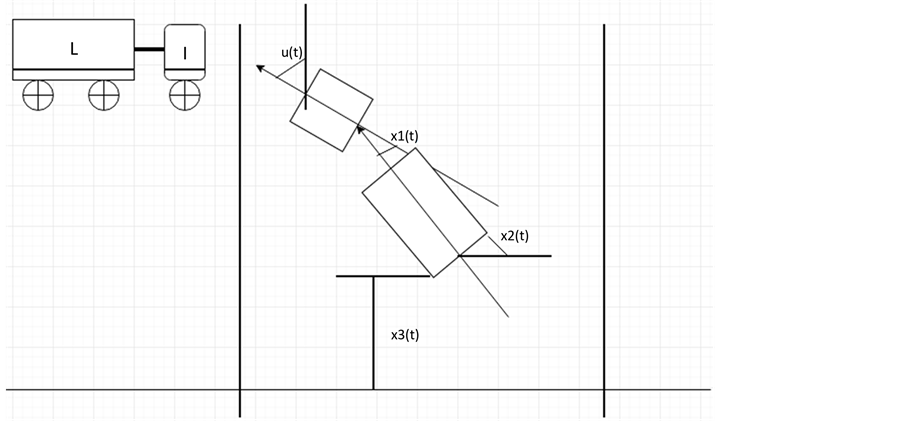
Figure 1. The diagram of truck trailer system
图1. 卡车拖车系统示意图
为了说明在时滞系统上的建议结果,我们假设系统 被扰动时滞和时滞模型给出卡车拖车系统的模型如下所示:
被扰动时滞和时滞模型给出卡车拖车系统的模型如下所示:


 .
.
常数 是延迟系数,我们假设
是延迟系数,我们假设 。其中卡车拖车各参数如下:
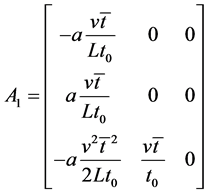
。其中卡车拖车各参数如下:
 ,
, ,
, ,
, ,
, ,
, ,
, ,由上述参数可知,
,由上述参数可知, ,
, 可得
可得 ,
, 。
。
模型采用以下模糊规则:

Rule 1: IF  is about 0, THEN
is about 0, THEN
 (4)
(4)
Rule 1: IF  is about
is about ,THEN
,THEN
 (5)
(5)
其中
 ,
, ,
, ,
, ,
,
 ,
, ,
, ,
, ,
,
 ,
, ,
,
 ,
, ,
,
 ,
,
将以上的模糊控制规则的测量输出设置为:
 (6)
(6)
并且 和
和 。系统中的随机部分可以被设置为:
。系统中的随机部分可以被设置为: 并且
并且 ,
, ,
, ,
, ,而且
,而且 ,
, ,
, 。
。
其中 。
。
隶属度函数为:
 ,
, ,
,
取钟型隶属度函数:
 ,
,
3.2. 卡车拖车系统模型鲁棒状态反馈 控制设计方法
控制设计方法
根据之前的控制器设计,我们通过利用平行分布式补偿技术(PDC),结合线性矩阵不等式(LMI)的有关形式设计出一个T-S模糊时滞卡车拖车系统控制器 [1] 。该控制器设计能在首先保证了卡车拖车倒车系统的鲁棒稳定性的前提下,将作为给定条件的 控制性能指标实现。
控制性能指标实现。
定理:给定量 和
和 ,如果存在矩阵
,如果存在矩阵 ,
, ,
, 和矩阵
和矩阵 ,以及一些量
,以及一些量 ,
, ,
, 和
和
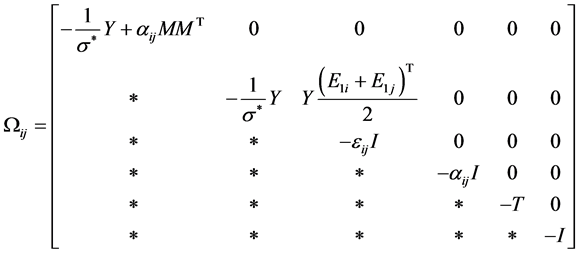
 使得以下线性矩阵不等式成立:
使得以下线性矩阵不等式成立:
 (7)
(7)
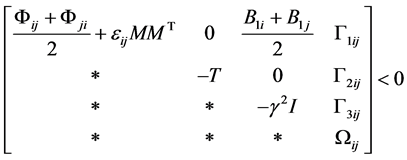 (8)
(8)
其中下列方程式成立,

 ,
,

那么T-S模糊系统(4) (5) (6)在给定时滞
 条件下渐近稳定,并且满足
条件下渐近稳定,并且满足 干扰衰减指标
干扰衰减指标 :
: ,其控制器由下式可得:
,其控制器由下式可得:
 。
。
4. 仿真结果与讨论
这里,我们基于卡车拖车系统模型鲁棒状态反馈 控制器及其定理,设控制输出初始状态向量选择为
控制器及其定理,设控制输出初始状态向量选择为 ,干扰输入为
,干扰输入为 。然后,设
。然后,设 和
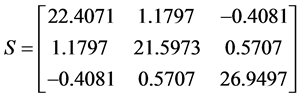
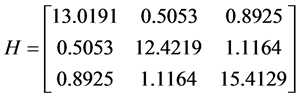
和 解线性矩阵不等式(7)和(8)其结果如下:
解线性矩阵不等式(7)和(8)其结果如下:
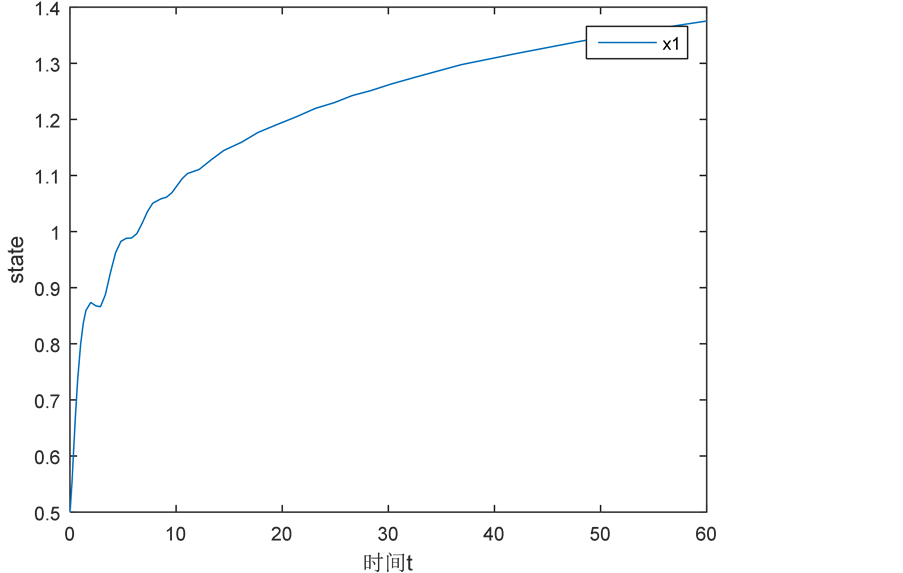
Figure 2. Status trajectories of  for open loop systems
for open loop systems
图2. 开环系统的 的状态轨迹
的状态轨迹

Figure 3. Status trajectories of  for open loop systems
for open loop systems
图3. 开环系统的 的状态轨迹
的状态轨迹
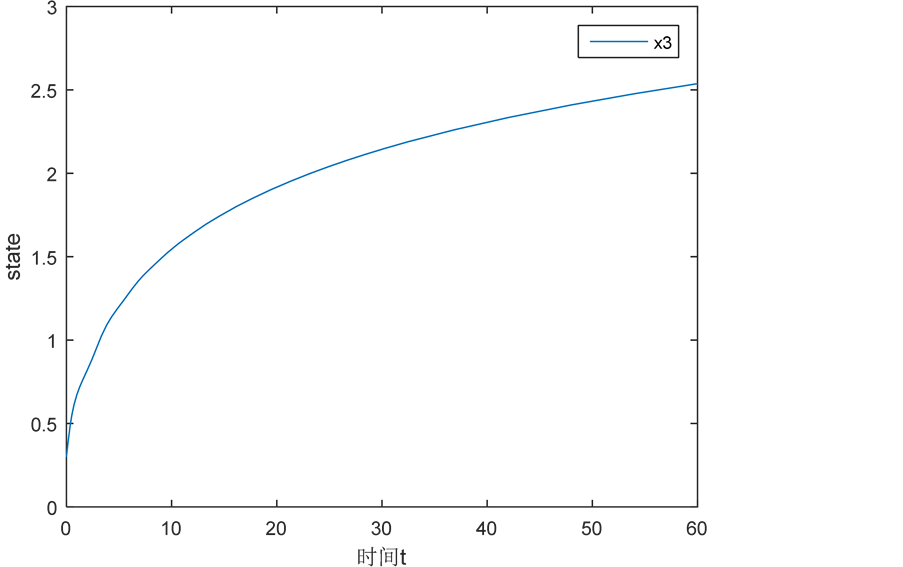
Figure 4. State trajectories of  for open loop systems
for open loop systems
图4. 开环系统的 的状态轨迹
的状态轨迹
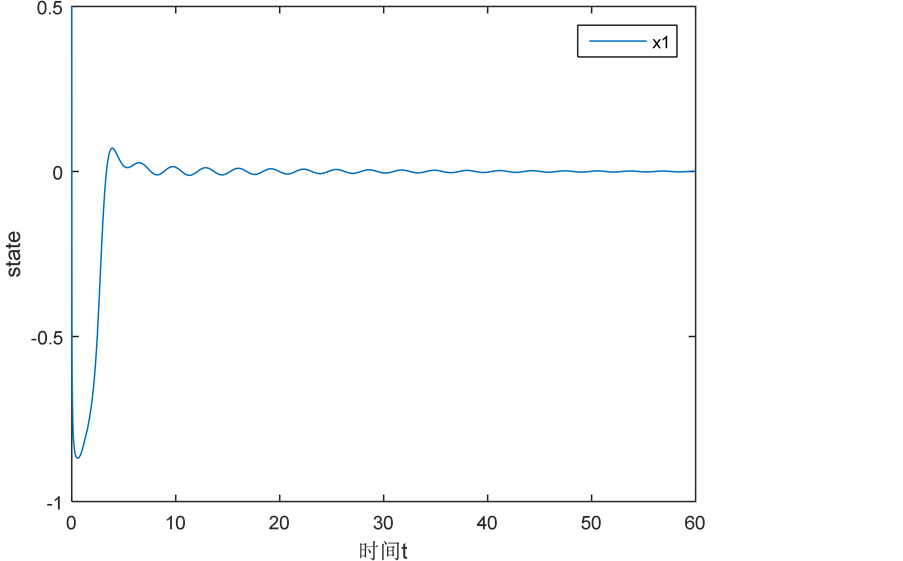
Figure 5. State trajectories of  for closed-loop systems
for closed-loop systems
图5. 闭环系统的 的状态轨迹
的状态轨迹
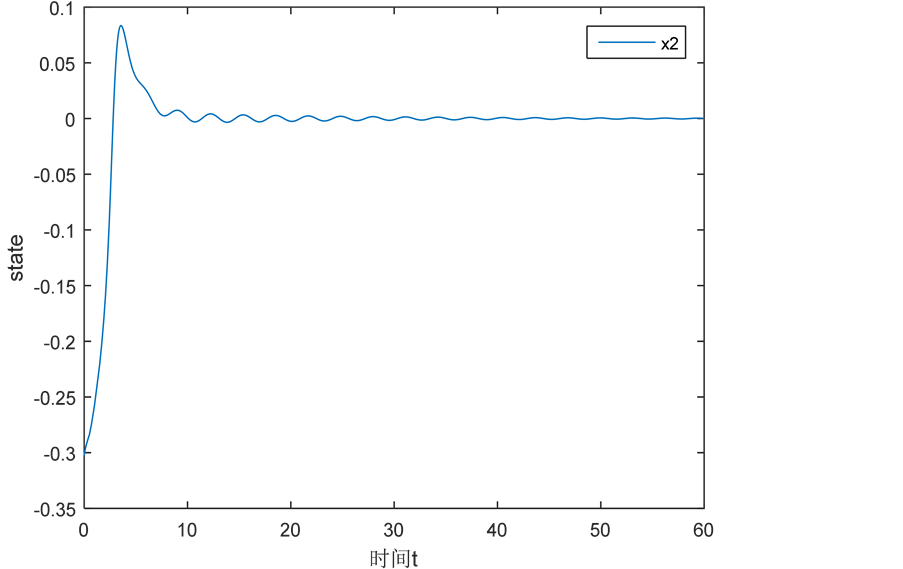
Figure 6. State trajectories of  for closed-loop systems
for closed-loop systems
图6. 闭环系统的 的状态轨迹
的状态轨迹

Figure 7. State trajectories of  for closed-loop systems
for closed-loop systems
图7. 闭环系统的 的状态轨迹
的状态轨迹
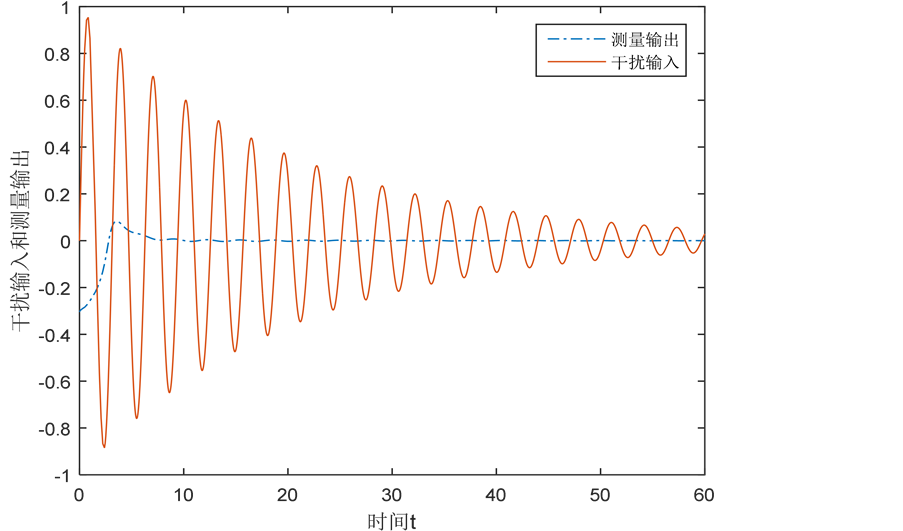
Figure 8. Measurement output and interference input for closed-loop systems
图8. 闭环系统的测量输出和干扰输入
 ,
,
 ,
,
 ,
, ,
, ,
, ,
, ,
,
我们根据条件及定理,得到图2、图3和图4为系统开环状态及外界干扰影响下的系统运行轨迹,分析可知,系统在此状态下相当不稳定。设置模拟闭环控制系统 ,
, ,通过总体状态模糊反馈控制率
,通过总体状态模糊反馈控制率 ,我们应用上面所求得的鲁棒
,我们应用上面所求得的鲁棒 控制器,对系统进行仿真,仿真结果如图5、图6、图7和图8所示。
控制器,对系统进行仿真,仿真结果如图5、图6、图7和图8所示。
可以看出,对于 抑制条件,使用模糊控制律
抑制条件,使用模糊控制律 闭环控制系统鲁棒稳定。模拟结果可以明显看出所给方法对于具有时滞的卡车拖车系统的有效性。
闭环控制系统鲁棒稳定。模拟结果可以明显看出所给方法对于具有时滞的卡车拖车系统的有效性。
基金项目
黑龙江大学大学生创新创业训练计划项目(2016366)。
文章引用
柳兴旺,巩 诚,陈子健,邓 劼,包新宇. T-S模糊时滞模型在卡车拖车控制系统中的应用仿真研究
Simulation Research on Application of T-S Fuzzy Delay Model in Truck Trailer Control System[J]. 运筹与模糊学, 2017, 07(02): 61-71. http://dx.doi.org/10.12677/ORF.2017.72008
参考文献 (References)
- 1. 黄建安. 基于模糊模型的非线性网络化控制系统的建模与分析[D]: [硕士学位论文]. 广州: 广东工业大学, 2014.
- 2. 巩长忠. 基于T-S模糊模型的控制方法及稳定性分析[D]: [博士学位论文]. 大连: 大连理工大学, 2003.
- 3. 彭彤. 离散T-S模糊系统的模型降阶及降阶滤波器设计研究[D]: [博士学位论文]. 哈尔滨: 哈尔滨工业大学, 2014.
- 4. 巩诚. T-S模糊时滞系统的鲁棒H_∞控制及滤波[D]: [博士学位论文]. 哈尔滨: 哈尔滨工业大学, 2008.
- 5. 李晶莹. T-S模糊采样系统的稳定性分析与控制器设计[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工业大学, 2014.