Advances in Applied Mathematics
Vol.3 No.03(2014), Article
ID:14020,5
pages
DOI:10.12677/AAM.2014.33022
Stability in a Predator-Prey Model with Discrete and Distributed Delays
Hunan College of Information, Changsha
Email: zhu-huan-tao@163.com
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: May 28th, 2014; revised: Jun. 27th, 2014; accepted: Jul. 8th, 2014
ABSTRACT
The stability in a predator-prey model with discrete and distributed delays is investigated. By using linearized methods for the positive equilibrium and analyzing the corresponding characteristic equations, sufficient conditions for asymptotic stability of the positive equilibrium and the Hopf bifurcation occurring are derived.
Keywords:Delays, Predator Model, Stability, Hopf Bifurcation

一类具离散和分布时滞的捕食–食饵模型的稳定性
朱焕桃,张钟德,陈五立
湖南信息职业技术学院,长沙
Email: zhu-huan-tao@163.com
收稿日期:2014年5月28日;修回日期:2014年6月27日;录用日期:2014年7月8日

摘 要
研究了一类具有离散和分布时滞的捕食–食饵模型系统,通过在正平衡点处线性化模型,并分析相应的特征方程,得到了正平衡点的渐近稳定性和模型产生Hopf分支的条件。
关键词
时滞,捕食模型,稳定性,Hopf分支

1. 引言
经典的Lotka-Volterra捕食—食饵模型是生物数学研究领域中最重要的模型之一。Volterra最先提出含有时滞的捕食—食饵模型[1] ,随后,Brelot对其进行了修正并得到如下具分布时滞的模型[2]
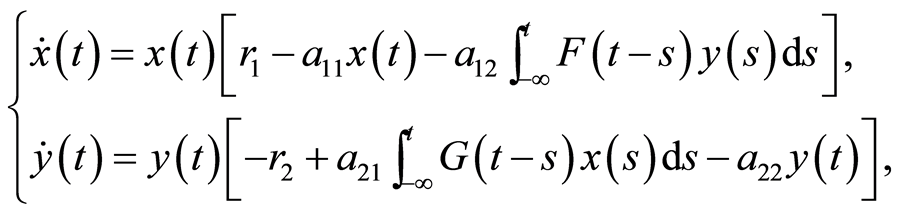
其中 和
和 分别表示
分别表示 时刻食饵和捕食种群的密度,
时刻食饵和捕食种群的密度, 和
和 是正常数,
是正常数, 和
和![]() 是非负连续的时滞函数且
是非负连续的时滞函数且

Song和Yuan研究了如下一类具有离散和分布时滞的捕食—食饵系统[3]

其中![]() ,时滞
,时滞 是参数,他们得到了系统的正平衡点失去稳定性和Hopf分支的条件。
是参数,他们得到了系统的正平衡点失去稳定性和Hopf分支的条件。
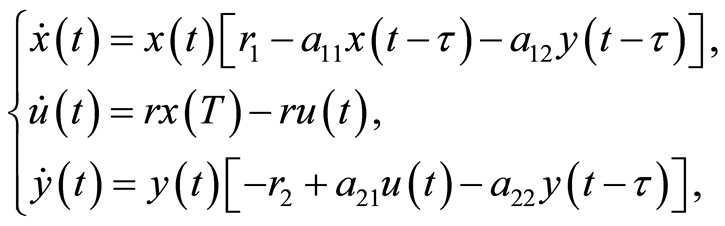
本文我们将考虑如下具有离散和分布时滞的捕食—食饵系统
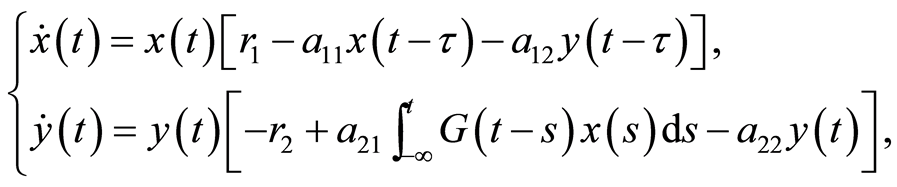 (1)
(1)
其中![]() ,
,![]() ,
, ,
, ,函数
,函数 是在
是在 上的非负有界函数。下面探讨系统(1)的正平衡点失去稳定性和Hopf分支的条件。
上的非负有界函数。下面探讨系统(1)的正平衡点失去稳定性和Hopf分支的条件。
2. 引理
引理1[4] [5] (Routh-Hurwitz定理)多项式方程
 (2)
(2)
所有根具有负实部的充要条件是 ,
, ,当
,当 时,定义
时,定义 。
。
引理2[6] 指数多项式

其中 ,
, 为常数。当
为常数。当 连续变化时,指数多项式
连续变化时,指数多项式 的位于右半平面的零点的重数之和只有在虚轴上存在根或者有根穿过虚轴时,才能发生变化。
的位于右半平面的零点的重数之和只有在虚轴上存在根或者有根穿过虚轴时,才能发生变化。
引理3[7] 设 关于
关于 有连续的一阶导数,对一切
有连续的一阶导数,对一切 ,
, ,并且满足以下两条件:1) 方程
,并且满足以下两条件:1) 方程 的特征矩阵
的特征矩阵![]() 是
是 的一阶连续可微函数,
的一阶连续可微函数, 存在一对简单纯虚特征根
存在一对简单纯虚特征根 ,所有其他的特征值
,所有其他的特征值 ,
, 为任意整数;2)
为任意整数;2) ,则存在常数
,则存在常数 ,函数
,函数 ,
, ,以及具有周期为
,以及具有周期为 的函数
的函数![]() ,当
,当 是,上述三个函数关于
是,上述三个函数关于 连续可微,使得
连续可微,使得![]() 是方程
是方程 的一个解,并且
的一个解,并且
 (3)
(3)
其中当 时,
时, ,
, 。此外,对于
。此外,对于 ,
, ,方程
,方程 满足
满足 的
的 周期解相差某个时间的相移外,必有(3)的形式。
周期解相差某个时间的相移外,必有(3)的形式。
3. 主要结论
定义变量 ,则系统(1)可转化为如下的等价系统
,则系统(1)可转化为如下的等价系统
 (4)
(4)
下面我们将研究系统(4),经计算系统(4)的平凡平衡点 ,其边界平衡点为
,其边界平衡点为 ,则有一下结论:
,则有一下结论:
1) 系统(4)在平凡平衡点 的特征根为
的特征根为 ,
, ,
, ,故
,故 是不稳定的;
是不稳定的;
2) 系统(4)在边界平衡点![]() 的特征根为
的特征根为 ,
, ,其它特征值由方程
,其它特征值由方程 决
决
定。当 时,所有特征值有负实部,平衡点
时,所有特征值有负实部,平衡点![]() 是局部渐进稳定;反之,当
是局部渐进稳定;反之,当 时,特征值有正实部,平衡点
时,特征值有正实部,平衡点![]() 是不稳定的。
是不稳定的。
下面讨论系统(4)的正平衡点。为保证系统(4)存在一正解,假设(4)的系数满足如下条件:
(H1) 
显然,在条件(H1)下,系统(4)有唯一的正平衡点 ,其中
,其中

在条件(H1)下,我们得到系统(4)在 的特征方程
的特征方程
 (5)
(5)
其中

在方程(5)两边乘以 可得
可得
 (6)
(6)
当![]() 时,方程(6)变为
时,方程(6)变为
![]() (7)
(7)
根据引理1,方程(7)的所有根有负实部,即当![]() 时,系统的正平衡点
时,系统的正平衡点 是局部渐进稳定的。
是局部渐进稳定的。
当![]() 时,令
时,令 是纯虚根,则有
是纯虚根,则有

分离实部和虚部可得

因此,我们有

其中

由 ,我们有
,我们有
 (8)
(8)
其中

令 ,则方程(7)可化为
,则方程(7)可化为
 (9)
(9)
令![]()
假设下面的条件成立
(H2) 方程(9)至少有一个正实根
由于 ,我们得到若
,我们得到若 ,则条件(H2)成立。
,则条件(H2)成立。
不失一般性,假设方程(9)有六个正实根,分别定义为 。这时,方程(8)有六个正实根
。这时,方程(8)有六个正实根
![]()
又

令

其中 ;
; ,则
,则 是方程(6)的一对纯虚根,它与
是方程(6)的一对纯虚根,它与 对应。定义
对应。定义

假设
(H3) 
在方程(6)两边同时对 求导,可得
求导,可得

故

我们可以得到
 其中
其中
于是
根据引理2和引理3,我们得到如下定理:
定理 假设条件(H1)-(H3)成立,则有
1) 当 时,系统(4)的正平衡点
时,系统(4)的正平衡点 (即系统(1)的正平衡点
(即系统(1)的正平衡点 )是局部渐进稳定的;
)是局部渐进稳定的;
2) 系统(4)的正平衡点 (即系统(1)的正平衡点
(即系统(1)的正平衡点 )在
)在 时经历Hopf分支。
时经历Hopf分支。
4. 举例
考虑如下系统
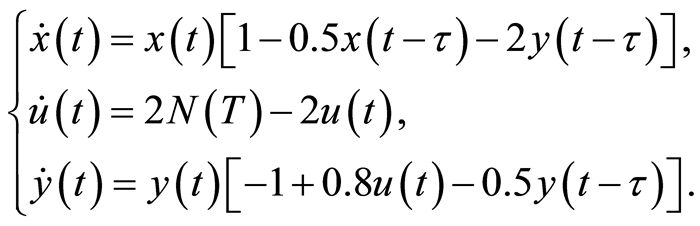 (10)
(10)
通过计算可得,系统(10)有唯一的正平衡点 ,
, ,
, ,
, ,因此,定理的条件满足,于是,当
,因此,定理的条件满足,于是,当 时正平衡点
时正平衡点 是局部稳定的;当
是局部稳定的;当 超过临界点
超过临界点 时正平衡点
时正平衡点 失去稳定性,从而分支出周期解。
失去稳定性,从而分支出周期解。
基金项目
湖南省教育厅资助科研项目(13C660)。
参考文献 (References)
- [1] Volterra, V. (1931) Lecons sur la theorie mathematique de la lutte pour la vie. Gauthier-Villars, Pairs.
- [2] Brelot, M. (1931) Sur le probleme biologique hereditaiar de deux especes devorante et devore. Annali di Matematica Pura ed Applicata, 9, 58-74.
- [3] Song, Y.L. and Yuan, S.L. (2006) Bifurcation analysis in a predator-prey system with time delay. Nonlinear Analysis: Real World Applications, 7, 265-284.
- [4] 廖晓昕 (2001) 稳定性的数学理论及应用. 第二版, 华中师范大学出版社, 武汉.
- [5] 马知恩, 周义仓 (2001) 常微分方程定性与稳定性方法. 科学出版社, 北京.
- [6] Ruan, S.G. and Wei, J.J. (2003) On the zeros of transcendental functions with applications to stability of delay differential equations with two delays. Dynamics of Continuous, Discrete and Impulsive Systems, Ser. A: Mathematical Analysis, 10, 863-874.
- [7] Hale, J.K. and Lunel, S.M.V. (1993) Introduction to Functional Differential Equations. Springer-Verlag, Berlin.