设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投稿
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
PureMathematics
n
Ø
ê
Æ
,2021,11(7),1369-1378
PublishedOnlineJuly2021inHans.http://www.hanspub.org/journal/pm
https://doi.org/10.12677/pm.2021.117154
ä
ž
C
X
ê
Ú
ž
¢
[
œ
²
ä
½
ž
m
Ó
Ú
444
§§§
ÜÜÜ
ttt
‚‚‚
§§§
¶¶¶
UUU
∗
þ
°
“
‰
Œ
Æ
§
ê
n
Æ
§
þ
°
Email:
∗
dingwei@shnu.edu.cn
Â
v
F
Ï
µ
2021
c
6
11
F
¶
¹
^
F
Ï
µ
2021
c
7
13
F
¶
u
Ù
F
Ï
µ
2021
c
7
21
F
Á
‡
©
ï
Ä
´
ä
k
ž
C
X
ê
Ú
ž
C
ž
¢
[
œ
²
ä
(FCNNs)
½
ž
m
Ó
Ú
¯
K
§
8
´
Ï
L
E
Ü
·
›
›
ì
§
¦
ü
‡
ä
k
ž
C
X
ê
Ú
ž
C
ž
¢
FCNNs
3
k
•
ž
m
S
Ó
Ú
§
¿
…
Œ
±
Ï
L
U
C
›
›
ì
ë
ê
5
ý
k
½
X
ÚÓ
Ú
¤
I
‡
ž
m
"
Ì
‡
•{
´
E
Ü
·
›
›
ì
±
9
Lyapunov
¼
ê
§
|
^
½
ž
m
-
½
5
n
Ø
9
˜
Ø
ª
E
|
§
ä
k
ž
C
X
ê
Ú
ž
C
ž
¢
FCNNs
½
ž
m
Ó
Ú
˜
#
¿
©
^
‡
"
•
„
‰
˜
‡
ê
Š
[
~
f
y
²
©
Ì
‡
(
J
k
5
"
'
…
c
[
œ
²
ä
§
½
ž
m
Ó
Ú
§
ž
C
X
ê
§
ž
C
ž
¢
Fixed-TimeSynchronizationforFuzzy
CellularNeuralNetworkswith
Time-VaryingCoefficientsandDelays
YangLiu,SonghuanZhang,WeiDing
∗
∗
Ï
Õ
Š
ö
"
©
Ù
Ú
^
:
4
,
Ü
t
‚
,
¶
U
.
ä
ž
C
X
ê
Ú
ž
¢
[
œ
²
ä
½
ž
m
Ó
Ú
[J].
n
Ø
ê
Æ
,2021,11(7):
1369-1378.
DOI:10.12677/pm.2021.117154
4
DepartmentofMathematics,ShanghaiNormalUniversity,Shanghai
Email:
∗
dingwei@shnu.edu.cn
Received:Jun.11
th
,2021;accepted:Jul.13
th
,2021;published:Jul.21
st
,2021
Abstract
This paper studiesthe fixed-timesynchronization problem offuzzycellularneural net-
works(FCNNs)withtime-varyingcoefficientsandtime-varyingdelays.Thepurpose
istobeabletomaketwoFCNNswithtime-varyingcoefficientsandtime-varyingde-
lays canbesynchronized in afinitetimeby constructing asuitablecontroller, andthe
time required forsystem synchronization can be presetby changingthe parametersof
thecontroller.ThemainmethodistoconstructasuitablecontrollerandLyapunov
function,andusethefixed-timestabilitytheoryandsomeinequalitytechniquesto
obtainsomenewsufficientconditionsforfixed-timesynchronizationofFCNNswith
time-varyingcoefficientsandtime-varyingdelays.Finally, anexampleisgiventoprove
thevalidityofthemainresultsofthispaper.
Keywords
FuzzyCellularNeuralNetwork,Fixed-TimeSynchronization,Time-Varying
Coefficient,Time-VaryingDelay
Copyright
c
2021byauthor(s)andHansPublishersInc.
This work is licensed undertheCreative Commons Attribution International License (CCBY 4.0).
http://creativecommons.org/licenses/by/4.0/
1.
Ú
ó
3
²
ä
ù
˜
+
•
,
²
ä
Ó
Ú
¯
K
3
L
A
›
c
p
Ú
å
<
‚
4
Œ
'
5
,
¿
…
²
ä
Ó
Ú
•
•
)
õ
«
Ó
Ú
a
.
.
3ù
Ó
Ú
a
.
¥
,
½
ž
m
Ó
Ú
Ú
k
•
ž
m
Ó
Ú
A^
•
\
2
•
,
Ï
•
N
õ
¢
S
A^
Ñ
‡
¦
X
Ú
U
3
k
•
ž
m
S
¢
y
Ó
Ú
.
DOI:10.12677/pm.2021.1171541370
n
Ø
ê
Æ
4
[
œ
²
ä
(FCNNs)
´
˜
«
Ó
ž
•
Ä
Ü
6
Ú
Û
Ü
ë
Ï
5
š
‚
5
ä
(
.
é
u
FCNNs
k
•
ž
m9
½
ž
m
Ó
Ú
¯
K
,
®
²
k
N
õ
k
d
Š
¤
J
,
~
X
©
z
[1][2][3],
Ù
¥
©
z
[1][2]
ï
Ä
Ñ
´
k
•
ž
m
Ó
Ú
¯
K
,
¤
O
Ó
Ú
ž
m
Ñ
†
X
Ú
Ð
©
^
‡
ƒ
'
.
ƒ
'
u
©
z
[1][2],
©
ï
Ä
K
´
½
ž
m
Ó
Ú
¯
K
,
Ó
U
¢
yX
Ú
uk
•
ž
m
S
ˆ
Ó
Ú
,
`
³
3
u
¤
O
Ó
Ú
ž
m
Ú
X
Ú
Ð
©
^
‡
v
k
'
X
,
3
¢
S
A^
¥
•
\
•
B
…
2
•
.
2.
.
£
ã
3
©
¥
,
·
‚
ï
Ä
´
X
e
ä
k
ž
C
X
ê
Ú
ž
C
ž
¢
FCNNs:
˙
x
i
(
t
) =
−
c
i
(
t
)
x
i
(
t
)+
n
X
j
=1
a
ij
(
t
)
f
j
(
x
j
(
t
))+
n
X
j
=1
b
ij
(
t
)
f
j
(
x
j
(
t
−
τ
j
(
t
)))+
n
X
j
=1
d
ij
(
t
)
v
j
(
t
)
+
n
^
j
=1
T
ij
(
t
)
v
j
(
t
)+
n
^
j
=1
α
ij
(
t
)
f
j
(
x
j
(
t
−
τ
j
(
t
)))+
n
_
j
=1
S
ij
(
t
)
v
j
(
t
)
+
n
_
j
=1
β
ij
(
t
)
f
j
(
x
j
(
t
−
τ
j
(
t
)))+
I
i
(
t
)
,
x
i
(
s
) =
φ
i
(
s
)
,s
∈
[
−
τ,
0]
,
(2
.
1)
Ù
¥
i,j
∈
J
=
{
1
,
2
,...,n
}
,
x
i
(
t
)
“
L
1
i
‡
²
3
t
ž
G
;
c
i
(
t
)
´
P
~
Ç
;
f
j
(
·
)
´
-
y
¼
ê
;
3
a
ij
(
t
)
,b
ij
(
t
)
Ú
d
ij
(
t
)
¥
,
c
ü
‡
´
‡
"
†
ƒ
,
•
˜
‡
´
c
"
†
ƒ
;
V
(
W
)
L
«
Ú
(
½
)
$
Ž
;
T
ij
(
t
) (
S
ij
(
t
))
Ú
α
ij
(
t
) (
β
ij
(
t
))
©
O
´
c
"
•
(
•
Œ
)
†
Ú
‡
"
•
(
•
Œ
)
†
ƒ
;
v
j
(
t
)
Ú
I
i
(
t
)
©
O
“
L
Ñ
\
†
˜
;
τ
j
(
t
)
•
ž
C
ž
¢
;
X
Ú
(2.1)
Ð
Š
•
φ
i
(
s
)
∈C
([
−
τ,
0]
,
R
n
),
Ù
¥
C
([
−
τ,
0]
,
R
n
)
´
l
[
−
τ,
0]
N
R
n
ë
Y
¼
ê
8
,
¿
…
τ
=max
1
≤
j
≤
n
{
τ
j
(
t
)
}
.
þ
¡
X
Ú
(2.1)
´
°
Ä
X
Ú
,
é
A
•
A
X
Ú
X
e
¤
«
:
˙
y
i
(
t
) =
−
c
i
(
t
)
y
i
(
t
)+
n
X
j
=1
a
ij
(
t
)
f
j
(
y
j
(
t
))+
n
X
j
=1
b
ij
(
t
)
f
j
(
y
j
(
t
−
τ
j
(
t
)))+
n
X
j
=1
d
ij
(
t
)
v
j
(
t
)
+
n
^
j
=1
T
ij
(
t
)
v
j
(
t
)+
n
^
j
=1
α
ij
(
t
)
f
j
(
y
j
(
t
−
τ
j
(
t
)))+
n
_
j
=1
S
ij
(
t
)
v
j
(
t
)
+
n
_
j
=1
β
ij
(
t
)
f
j
(
y
j
(
t
−
τ
j
(
t
)))+
I
i
(
t
)+
u
i
(
t
)
,
y
i
(
s
) =
ϕ
i
(
s
)
,s
∈
[
−
τ,
0]
,
(2
.
2)
Ù
¥
u
i
(
t
)
•
ƒ
‡
O
›
›
ì
.
DOI:10.12677/pm.2021.1171541371
n
Ø
ê
Æ
4
^
X
Ú
(2.2)
~
X
Ú
(2.1)
Œ
Ø
X
Ú
•
:
˙
e
i
(
t
) =
−
c
i
(
t
)
e
i
(
t
)+
n
X
j
=1
a
ij
(
t
)
f
j
(
e
j
(
t
))+
n
X
j
=1
b
ij
(
t
)
f
j
(
e
j
(
t
−
τ
j
(
t
)))
+
n
^
j
=1
α
ij
(
t
)
f
j
(
e
j
(
t
−
τ
j
(
t
)))+
n
_
j
=1
β
ij
(
t
)
f
j
(
e
j
(
t
−
τ
j
(
t
)))+
u
i
(
t
)
,
e
i
(
s
) =
ϕ
i
(
s
)
−
φ
i
(
s
)
,s
∈
[
−
τ,
0]
,
(2
.
3)
Ù
¥
e
i
(
·
) =
y
i
(
·
)
−
x
i
(
·
)
,f
j
(
e
j
(
·
)) =
f
j
(
y
j
(
·
))
−
f
j
(
x
j
(
·
)).
½
Â
2.1
.
e
•
3
~
ê
T
0
÷
v
^
‡
:(i)lim
t
→
T
0
e
i
(
t
)=0,(ii)
∀
t>T
0
,e
i
(
t
)
≡
0
,i
∈
J
.
@
o
X
Ú
(2.1)
Ú
(2.2)
3
-
½
ž
m
T
0
U
½
ž
m
Ó
Ú
,
Ù
¥
T
0
Ú
X
Ú
Ð
©
^
‡
v
k
'
X
.
Ú
n
2.1
([4]).
é
u
i,j
∈
J
,
x
j
,y
j
,ζ
ij
,ς
ij
∈
R
,
f
j
:
R
→
R
´
ë
Y
,
K
k
|
n
^
j
=1
ζ
ij
f
j
(
x
j
)
−
n
^
j
=1
ζ
ij
f
j
(
y
j
)
|≤
n
X
j
=1
|
ζ
ij
||
f
j
(
x
j
)
−
f
j
(
y
j
)
|
,
|
n
_
j
=1
ς
ij
f
j
(
x
j
)
−
n
_
j
=1
ς
ij
f
j
(
y
j
)
|≤
n
X
j
=1
|
ς
ij
||
f
j
(
x
j
)
−
f
j
(
y
j
)
|
.
Ú
n
2.2
([5]).
-
0
<µ
≤
1
<λ
,
κ
i
≥
0,
ι
i
≥
0,
i
∈
J
,
K
n
X
i
=1
ι
µ
i
≥
(
n
X
i
=1
ι
i
)
µ
,
n
X
i
=1
κ
λ
i
≥
n
1
−
λ
(
n
X
i
=1
κ
i
)
λ
.
Ú
n
2.3
([6]).
e
•
3
˜
‡
»
•
Ã
.
,
½
¿
…
ë
Y
¼
ê
V
:
R
n
→
R
+
S
{
0
}
k
˙
V
(
e
(
t
))
≤
−
aV
λ
(
e
(
t
))
−
bV
µ
(
e
(
t
)),
Ù
¥
0
<µ<
1
<λ,a>
0
,b>
0,
@
o
Ø
X
Ú
(2.3)
½
ž
m
-
½
,
K
X
Ú
(2.1)
Ú
(2.2)
3
-
½
ž
m
T
0
ž
½
ž
m
Ó
Ú
,
¿
…
k
T
0
≤
T
max
=
1
a
(
λ
−
1)
+
1
b
(1
−
µ
)
.
3.
Ì
‡
(
J
©
k
X
e
ü
^
b
:
(
A
1
).
é
u
∀
x,y
∈
R
n
,x
6
=
y
,
•
3
~
ê
ω
i
>
0
÷
v
|
f
i
(
y
)
−
f
i
(
x
)
|≤
ω
i
|
y
−
x
|
,i
∈
J.
(
A
2
).
b
c
i
(
t
),
a
ij
(
t
),
b
ij
(
t
),
d
ij
(
t
),
T
ij
(
t
),
α
ij
(
t
),
S
ij
(
t
),
β
ij
(
t
),
v
j
(
t
),
I
i
(
t
):
R
→
R
´
ë
Y
¿
…
k
.
¼
ê
.
é
u
ë
Y
k
.
¼
ê
g
(
t
),
k
X
e
P
Ò
:
g
−
=inf
t
∈
R
g
(
t
)
,g
+
= sup
t
∈
R
g
(
t
)
.
•
¦
X
Ú
(2.1)
Ú
(2.2)
U
¢
y
½
ž
m
Ó
Ú
,
·
‚
E
X
e
›
›
ì
:
u
i
(
t
) =
−
k
i
e
i
(
t
)
−
η
i
sign(
e
i
(
t
))
|
e
i
(
t
−
τ
i
(
t
))
|−
ρ
i
sign(
e
i
(
t
))
|
e
i
(
t
)
|
λ
−
l
i
sign(
e
i
(
t
))
|
e
i
(
t
)
|
µ
,
(3.1)
DOI:10.12677/pm.2021.1171541372
n
Ø
ê
Æ
4
Ù
¥
k
i
≥
0
,η
i
≥
0
,ρ
i
>
0
,l
i
>
0
,
0
<µ<
1
<λ,i
∈
J.
½
n
3.1
.
3
(
A
1
),(
A
2
)
Ú
›
›
ì
(3.1)
e
,
e
e
Ø
ª
¤
á
:
c
−
i
+
k
i
−
n
X
j
=1
|
a
ji
|
+
ω
i
≥
0
,
η
i
−
n
X
j
=1
(
|
b
ji
|
+
+
|
α
ji
|
+
+
|
β
ji
|
+
)
ω
i
≥
0
,
(3
.
2)
@
o
X
Ú
(2.1)
Ú
(2.2)
Œ
±
3
½
ž
m
T
0
Ó
Ú
,
¿
…
T
0
≤
T
max
=
1
ρn
1
−
λ
(
λ
−
1)
+
1
l
(1
−
µ
)
,
(3.3)
Ù
¥
ρ
=min
1
≤
i
≤
n
{
ρ
i
}
>
0
,l
=min
1
≤
i
≤
n
{
l
i
}
>
0
,i,j
∈
J.
y
²
.
•
Ä
X
e
Lyapunov
¼
ê
V
(
e
(
t
)) =
n
X
i
=1
|
e
i
(
t
)
|
.
(3.4)
(i)
e
i
(
t
) =0
ž
,
é
u
›
›
ì
(3.1)
k
u
i
(
t
) =0,
¿
…
Ø
X
Ú
(2.3)
3ù
ž´
-
½
.
Ï
d
o
´
k
Ü
·
ë
ê
÷
v
^
‡
(3.2).
•
Ò
´
`
,
½
n
3.1
˜
½
´
¤
á
.
(ii)
e
i
(
t
)
6
= 0
ž
,
O
Ž
(3.4)
ê
˙
V
(
e
(
t
)) =
n
X
i
=1
sign(
e
i
(
t
))˙
e
i
(
t
)
.
ò
(2.3)
Ú
(3.1)
“
\
?
1
˜
Œ
˙
V
(
e
(
t
)) =
n
X
i
=1
sign(
e
i
(
t
))[
−
c
i
(
t
)
e
i
(
t
)+
n
X
j
=1
a
ij
(
t
)
f
j
(
e
j
(
t
))+
n
X
j
=1
b
ij
(
t
)
f
j
(
e
j
(
t
−
τ
j
(
t
)))
+
n
^
j
=1
α
ij
(
t
)
f
j
(
e
j
(
t
−
τ
j
(
t
)))+
n
_
j
=1
β
ij
(
t
)
f
j
(
e
j
(
t
−
τ
j
(
t
)))
−
k
i
e
i
(
t
)
−
η
i
sign(
e
i
(
t
))
|
e
i
(
t
−
τ
i
(
t
))
|−
ρ
i
sign(
e
i
(
t
))
|
e
i
(
t
)
|
λ
−
l
i
sign(
e
i
(
t
))
|
e
i
(
t
)
|
µ
]
≤
n
X
i
=1
−
(
c
i
(
t
)+
k
i
)
|
e
i
(
t
)
|
+
n
X
i
=1
n
X
j
=1
|
a
ij
(
t
)
||
f
j
(
e
j
(
t
))
|
+
n
X
i
=1
n
X
j
=1
|
b
ij
(
t
)
||
f
j
(
e
j
(
t
−
τ
j
(
t
)))
|
+
n
X
i
=1
|
n
^
j
=1
α
ij
(
t
)
f
j
(
e
j
(
t
−
τ
j
(
t
)))
|
+
n
X
i
=1
|
n
_
j
=1
β
ij
(
t
)
f
j
(
e
j
(
t
−
τ
j
(
t
)))
|
−
n
X
i
=1
η
i
|
e
i
(
t
−
τ
i
(
t
))
|−
n
X
i
=1
ρ
i
|
e
i
(
t
)
|
λ
−
n
X
i
=1
l
i
|
e
i
(
t
)
|
µ
.
DOI:10.12677/pm.2021.1171541373
n
Ø
ê
Æ
4
Š
â
Ú
n
2.1
k
˙
V
(
e
(
t
))
≤
n
X
i
=1
−
(
c
i
(
t
)+
k
i
)
|
e
i
(
t
)
|
+
n
X
i
=1
n
X
j
=1
|
a
ij
(
t
)
||
f
j
(
e
j
(
t
))
|
+
n
X
i
=1
n
X
j
=1
|
b
ij
(
t
)
||
f
j
(
e
j
(
t
−
τ
j
(
t
)))
|
+
n
X
i
=1
n
X
j
=1
|
α
ij
(
t
)
||
f
j
(
e
j
(
t
−
τ
j
(
t
)))
|
+
n
X
i
=1
n
X
j
=1
|
β
ij
(
t
)
||
f
j
(
e
j
(
t
−
τ
j
(
t
)))
|
−
n
X
i
=1
η
i
|
e
i
(
t
−
τ
i
(
t
))
|−
n
X
i
=1
ρ
i
|
e
i
(
t
)
|
λ
−
n
X
i
=1
l
i
|
e
i
(
t
)
|
µ
.
Š
â
(
A
1
)
Ú
(
A
2
)
Œ
˙
V
(
e
(
t
))
≤
n
X
i
=1
−
(
c
−
i
+
k
i
)
|
e
i
(
t
)
|
+
n
X
i
=1
n
X
j
=1
|
a
ij
|
+
ω
j
|
e
j
(
t
)
|
+
n
X
i
=1
n
X
j
=1
(
|
b
ij
|
+
+
|
α
ij
|
+
+
|
β
ij
|
+
)
ω
j
|
e
j
(
t
−
τ
j
(
t
))
|
−
n
X
i
=1
η
i
|
e
i
(
t
−
τ
i
(
t
))
|−
n
X
i
=1
ρ
i
|
e
i
(
t
)
|
λ
−
n
X
i
=1
l
i
|
e
i
(
t
)
|
µ
=
n
X
i
=1
−
(
c
−
i
+
k
i
)
|
e
i
(
t
)
|
+
n
X
i
=1
n
X
j
=1
|
a
ji
|
+
ω
i
|
e
i
(
t
)
|
+
n
X
i
=1
n
X
j
=1
(
|
b
ji
|
+
+
|
α
ji
|
+
+
|
β
ji
|
+
)
ω
i
|
e
i
(
t
−
τ
i
(
t
))
|
−
n
X
i
=1
η
i
|
e
i
(
t
−
τ
i
(
t
))
|−
n
X
i
=1
ρ
i
|
e
i
(
t
)
|
λ
−
n
X
i
=1
l
i
|
e
i
(
t
)
|
µ
=
n
X
i
=1
−
(
c
−
i
+
k
i
−
n
X
j
=1
|
a
ji
|
+
ω
i
)
|
e
i
(
t
)
|
−
n
X
i
=1
[
η
i
−
n
X
j
=1
(
|
b
ji
|
+
+
|
α
ji
|
+
+
|
β
ji
|
+
)
ω
i
]
|
e
i
(
t
−
τ
i
(
t
))
|
−
n
X
i
=1
ρ
i
|
e
i
(
t
)
|
λ
−
n
X
i
=1
l
i
|
e
i
(
t
)
|
µ
.
DOI:10.12677/pm.2021.1171541374
n
Ø
ê
Æ
4
d
^
‡
(3.2)
9
Ú
n
2.2
O
Ž
˙
V
(
e
(
t
))
≤−
n
X
i
=1
ρ
i
|
e
i
(
t
)
|
λ
−
n
X
i
=1
l
i
|
e
i
(
t
)
|
µ
≤−
ρ
n
X
i
=1
|
e
i
(
t
)
|
λ
−
l
n
X
i
=1
|
e
i
(
t
)
|
µ
≤−
ρn
1
−
λ
(
n
X
i
=1
|
e
i
(
t
)
|
)
λ
−
l
(
n
X
i
=1
|
e
i
(
t
)
|
)
µ
=
−
ρn
1
−
λ
V
λ
(
e
(
t
))
−
lV
µ
(
e
(
t
))
,
Ù
¥
ρ
=min
1
≤
i
≤
n
{
ρ
i
}
>
0
,l
=min
1
≤
i
≤
n
{
l
i
}
>
0
.
Ï
L
Ú
n
2.3,
·
‚
U
X
Ú
(2.1)
Ú
(2.2)
Œ
±
3
-
½
ž
m
T
0
¢
y
½
ž
m
Ó
Ú
,
¿
…
T
0
≤
T
max
=
1
ρn
1
−
λ
(
λ
−
1)
+
1
l
(1
−
µ
)
.
y
.
.
í
Ø
3.1
.
e
X
Ú
(2.1)
Ú
(2.2)
¥
¤
k
ž
C
X
ê
Ñ
ò
z
•
~
ê
,
@
o
½
n
3.1
(
Ø
E,
¤
á
.
í
Ø
3.2
.
e
X
Ú
(2.1), (2.2)
9
›
›
ì
(3.1)
¥
¤
k
ž
C
ž
¢
t
−
τ
j
(
t
)
Ñ
O
†
•
'
~
ž
¢
q
ij
t
,
Ù
¥
q
ij
∈
(0
,
1],
K
½
n
3.1
(
Ø
E,
¤
á
.
5
3.1
.
©
z
[1]
9
©
z
[2]
®
²
©
O
ï
Ä
ä
k
~
X
ê
Ú
ž
C
ž
¢
FCNNs
9
ä
k
ž
C
X
ê
Ú
'
~
ž
¢
FCNNs ,
¿
…
Ñ
´
ï
Ä
k
•
ž
m
Ó
Ú
¯
K
,
¤
O
-
½
ž
m
Ñ
Ú
X
Ú
Ð
©
^
‡
´
ƒ
'
.
´
3
˜
„
œ
¹
e
,
Ð
©
^
‡
Ø
N
´
¼
,
í
Ø
3.1
Ú
í
Ø
3.2
-
½
ž
m
Ñ
Ú
Ð
©
^
‡
v
k
'
X
,
í
Ø
3.1
Ú
í
Ø
3.2
(
J
'
©
z
[1]
Ú
[2]
‡
•
\
¢
^
.
5
3.2
.
Ï
•
sign
¼
ê´
Ø
ë
Y
,
§
Œ
U
¬
—
ËÄ
,
Š
â
©
z
[1]
Ž
{
,
·
‚
^
ë
Y
…
Š
•
•
(
−
1
,
1)
tanh
¼
ê
5
O
†
.
@
o
›
›
ì
(3.1)
Ò
C
¤
u
i
(
t
) =
−
k
i
e
i
(
t
)
−
η
i
tanh(
ξ
i
e
i
(
t
))
|
e
i
(
t
−
τ
i
(
t
))
|−
ρ
i
tanh(
%
i
e
i
(
t
))
|
e
i
(
t
)
|
λ
−
l
i
tanh(
p
i
e
i
(
t
))
|
e
i
(
t
)
|
µ
,
(3.5)
Ù
¥
k
i
≥
0
,η
i
≥
0
,ξ
i
>
0
,ρ
i
>
0
,%
i
>
0
,l
i
>
0
,p
i
>
0
,
0
<µ<
1
<λ,i
∈
J.
4.
ê
Š
[
3ù
˜
!
¥
·
‚
‰
˜
‡
‘
(
=
n
= 2)
~
f
y
©
¤
(
J
k
5
.
~
4.1
.
é
u
X
Ú
(2.1),(2.2)
9
›
›
ì
(3.5)
k
X
e
Š
:
α
i
1
(
t
)=
β
i
1
(
t
)=
1+sin
it
3
,α
i
2
(
t
)=
β
i
2
(
t
)=
1+cos
it
3
,c
1
(
t
)=
2+3sin
t
2
,c
2
(
t
)=
2+3cos
t
2
,a
i
1
(
t
)=
b
i
1
(
t
)=
1+sin
it
2
,a
i
2
(
t
)=
b
i
2
(
t
)=
1+cos
it
2
,τ
j
(
t
)=
exp(
t
)
1+exp(
t
)
,f
j
(
x
)=0
.
5(
|
x
+ 1
|−|
x
−
1
|
)
,I
i
(
t
)=
−
4
,T
ij
(
t
) =
v
j
(
t
) =
S
ij
(
t
) =
d
ij
(
t
) = 1
,i,j
= 1
,
2
.
Ð
©
^
‡
•
φ
(
s
)=(0
.
2
,
−
0
.
4)
T
,ϕ
(
s
)=(
−
0
.
2
,
0
.
4)
T
.
›
›
ì
(3.5)
¥
k
k
i
=3
,η
i
=5
,ρ
i
=
DOI:10.12677/pm.2021.1171541375
n
Ø
ê
Æ
4
1
,l
i
= 3
,λ
= 1
.
5
,µ
= 0
.
9
,ξ
i
=
%
i
=
p
i
= 2.
ω
i
= 1,
K
²
O
Ž
Œ
(
A
1
), (
A
2
)
9
^
‡
(3.2)
Ñ
÷
v
.
¿
d
(3.3)
Œ
-
½
ž
m
T
0
≤
T
max
≈
6
.
161.
Ï
d
,
Š
â
½
n
3.1
Œ
•
,
3
›
›
ì
(3.5)
e
,
X
Ú
(2.1)
Ú
X
Ú
(2.2)
3
T
0
ž
Œ
¢
y
½
ž
m
Ó
Ú
.
d
Matlab
^
‡
Œ
X
e
n
‡
ã
”
:
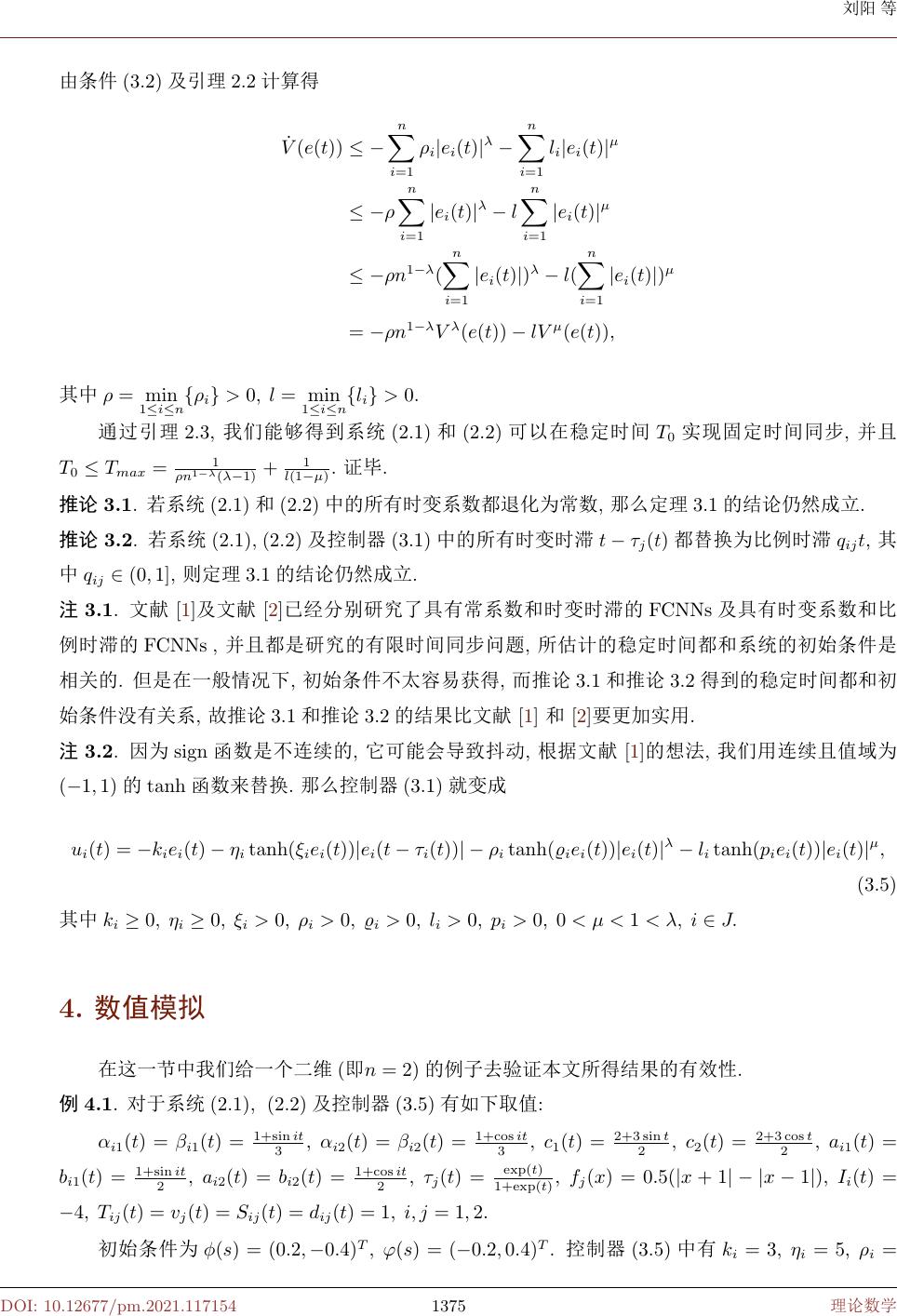
ã
1
L
²
e
Ã
›
›
ì
(3.5) ,
Ø
X
Ú
(2.3)
Ø
-
½
,
K
X
Ú
(2.1)
Ú
X
Ú
(2.2)
Ø
U
¢
y
Ó
Ú
(
„
ã
1).
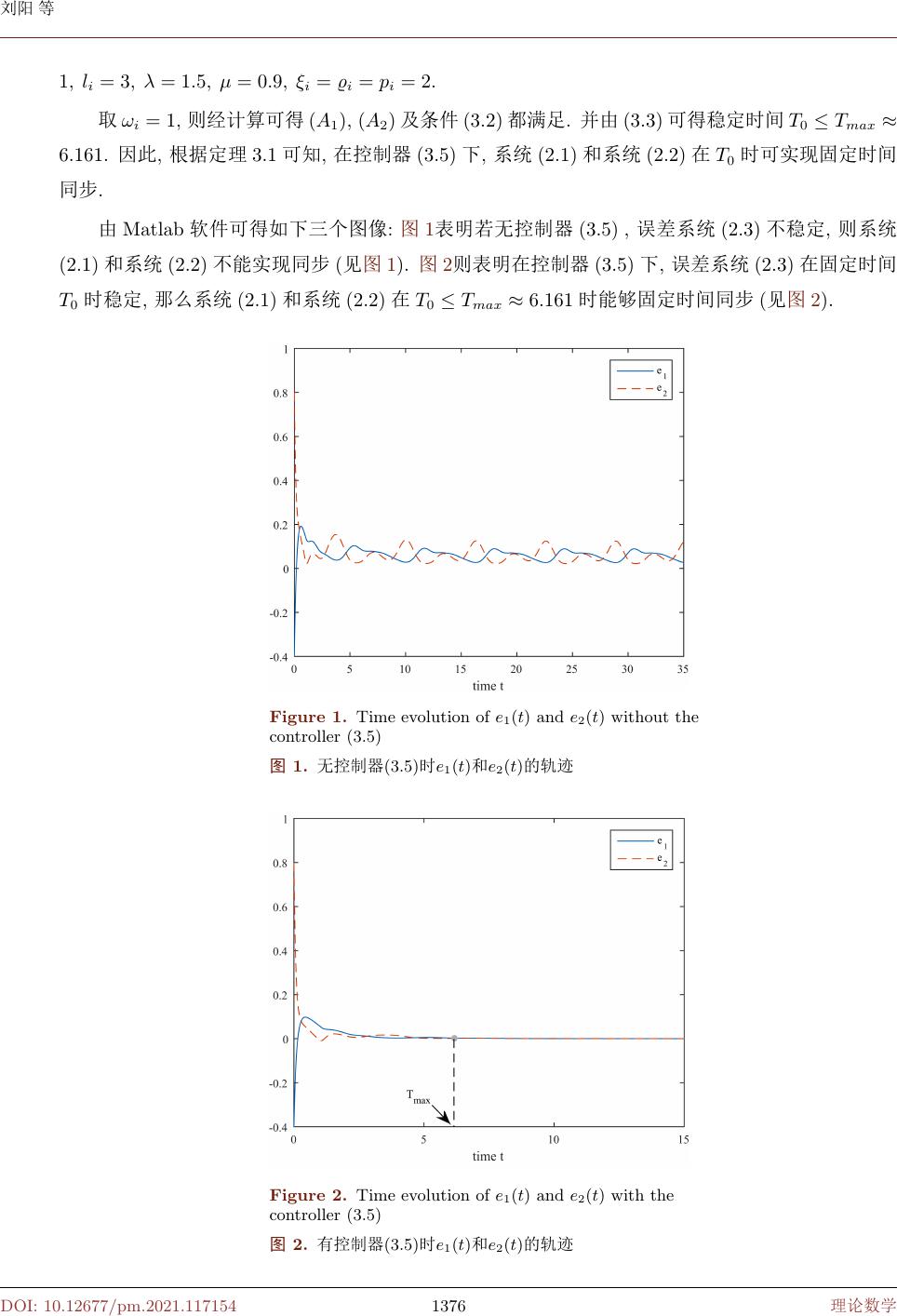
ã
2
K
L
²
3
›
›
ì
(3.5)
e
,
Ø
X
Ú
(2.3)
3
½
ž
m
T
0
ž
-
½
,
@
o
X
Ú
(2.1)
Ú
X
Ú
(2.2)
3
T
0
≤
T
max
≈
6
.
161
ž
U
½
ž
m
Ó
Ú
(
„
ã
2).
Figure1.
Timeevolutionof
e
1
(
t
)and
e
2
(
t
)withoutthe
controller(3.5)
ã
1.
Ã
›
›
ì
(3.5)
ž
e
1
(
t
)
Ú
e
2
(
t
)
;
,
Figure2.
Timeevolutionof
e
1
(
t
)and
e
2
(
t
)withthe
controller(3.5)
ã
2.
k
›
›
ì
(3.5)
ž
e
1
(
t
)
Ú
e
2
(
t
)
;
,
DOI:10.12677/pm.2021.1171541376
n
Ø
ê
Æ
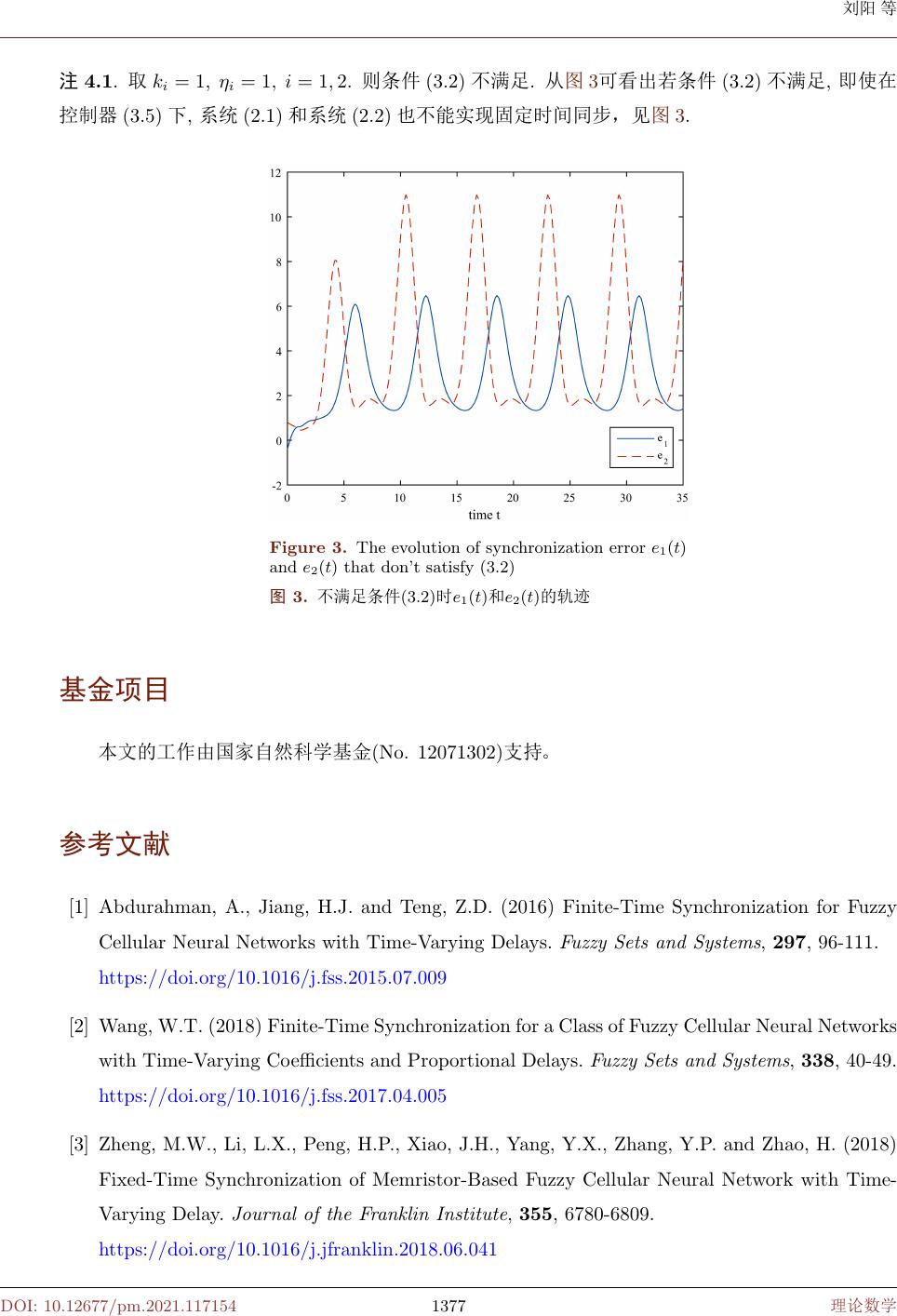
4
5
4.1
.
k
i
= 1
,η
i
= 1
,i
=1
,
2.
K
^
‡
(3.2)
Ø
÷
v
.
l
ã
3
Œw
Ñ
e
^
‡
(3.2)
Ø
÷
v
,
=
¦
3
›
›
ì
(3.5)
e
,
X
Ú
(2.1)
Ú
X
Ú
(2.2)
•
Ø
U
¢
y
½
ž
m
Ó
Ú
§
„
ã
3.
Figure3.
Theevolutionofsynchronizationerror
e
1
(
t
)
and
e
2
(
t
)thatdon’tsatisfy(3.2)
ã
3.
Ø
÷
v
^
‡
(3.2)
ž
e
1
(
t
)
Ú
e
2
(
t
)
;
,
Ä
7
‘
8
©
ó
Š
d
I
[
g
,
‰
Æ
Ä
7
(No.12071302)
|
±
"
ë
•
©
z
[1]Abdurahman,A.,Jiang,H.J.andTeng,Z.D.(2016)Finite-TimeSynchronizationforFuzzy
CellularNeuralNetworkswithTime-VaryingDelays.
FuzzySetsandSystems
,
297
,96-111.
https://doi.org/10.1016/j.fss.2015.07.009
[2]Wang, W.T.(2018) Finite-TimeSynchronization foraClass ofFuzzyCellularNeural Networks
withTime-Varying Coefficients andProportionalDelays.
FuzzySetsandSystems
,
338
,40-49.
https://doi.org/10.1016/j.fss.2017.04.005
[3]Zheng,M.W.,Li,L.X.,Peng,H.P.,Xiao,J.H.,Yang,Y.X.,Zhang,Y.P.andZhao,H.(2018)
Fixed-TimeSynchronizationofMemristor-BasedFuzzyCellularNeuralNetworkwithTime-
VaryingDelay.
JournaloftheFranklinInstitute
,
355
,6780-6809.
https://doi.org/10.1016/j.jfranklin.2018.06.041
DOI:10.12677/pm.2021.1171541377
n
Ø
ê
Æ
4
[4]Ding,W.andHan,M.A.(2008)SynchronizationofDelayedFuzzyCellularNeuralNetworks
BasedonAdaptiveControl.
PhysicsLettersA
,
372
,4674-4681.
https://doi.org/10.1016/j.physleta.2008.04.053
[5]Chen, C., Li, L., Peng,H., Yang, Y.andZhao,H.(2020) ANewFixed-TimeStabilityTheorem
andItsApplicationtothe Fixed-TimeSynchronization ofNeuralNetworks.
NeuralNetworks
,
123
,412-419.https://doi.org/10.1016/j.neunet.2019.12.028
[6]Polyakov,A. (2012) Nonlinear FeedbackDesign forFixed-TimeStabilization ofLinear Control
Systems.
IEEETransactionsonAutomaticControl
,
57
,2106-2110.
https://doi.org/10.1109/TAC.2011.2179869
DOI:10.12677/pm.2021.1171541378
n
Ø
ê
Æ