设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投稿
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
AdvancesinAppliedMathematics
应用数学进展
,2022,11(1),516-525
PublishedOnlineJanuary2022inHans.http://www.hanspub.org/journal/aam
https://doi.org/10.12677/aam.2022.111059
人工抗体治疗
COVID-19
的
病毒动力学模型
支从安,马春鸽
上海师范大学
,
上海
收稿日期:
2021
年
12
月
26
日;录用日期:
2022
年
1
月
21
日;发布日期:
2022
年
1
月
28
日
摘要
在本文中,我们建立了常量注射
ACE2
受体药物治疗
COVID-19
的动力学模型。首先,我们在
生物学意义下定义了基本再生数
R
0
,并且得出了系统的两个平衡点:无病平衡点
E
0
和地方病平
衡点
E
1
。其次,利用
Lyapunov
函数和
Routh-Hurwitz
判据证明了无病平衡点和地方病平衡
点的存在性和稳定性条件,即当
R
0
<
1
时,
E
0
局部渐近稳定;更进一步可证存在一个常数
R
1
。
当
R
1
<
1
时,
E
0
全局渐近稳定;当
R
0
>
1
时,
E
1
局部渐近稳定。最后,通过数值模拟验证了
所得结论。
关键词
COVID-19
病毒动力学模型,
Lyapunov
函数,
Routh-Hurwitz
判据
AVirusDynamicaModelforCOVID-19
TherapywithArtificialAntibody
Cong’anZhi,ChungeMa
ShanghaiNormalUniversity,Shanghai
Received:Dec.26
th
,2021;accepted:Jan.21
st
,2022;published:Jan.28
th
,2022
文章引用
:
支从安
,
马春鸽
.
人工抗体治疗
COVID-19
的病毒动力学模型
[J].
应用数学进展
,2022,11(1):516-525.
DOI:10.12677/aam.2022.111059
支从安,马春鸽
Abstract
Inthispaper,weformulateadynamicmodelforCOVID-19therapywiththeconst-
sntinjectionofACE2.First,thebasicreproductionnumber
R
0
isgiven.Wegettwo
possiblebiologicallymeaningfulequilibria:disease-freeequilibrium
E
0
andinfection
equilibrium
E
1
.When
R
0
<
1
,disease-freeequilibrium
E
0
islocallyasymptotically
stable;further,wecanprovethatthereexistsan
R
1
,when
R
1
<
1
,disease-freeequi-
librium
E
0
isgloballyasymptoticallystable;when
R
0
>
1
,
E
1
islocallyasymptotically
stable.Finally,numerical simulation isalsopresentedtodemonstrate theapplicability
ofthetheoreticalpredictions.
Keywords
COVID-19DynamicModel,LyapunovFunction,Routh-HurwitzCriterion
Copyright© 2022byauthor(s)andHansPublishersInc.
This work is licensed under theCreative Commons Attribution InternationalLicense (CCBY4.0).
http://creativecommons.org/licenses/by/4.0/
1.
引言
2019
冠状病毒病
(COVID-19)
是一种由严重急性呼吸综合征冠状病毒
2(SARS-CoV-2)
引起
的传染病
[1],
在国内被称为新型冠状病毒,简称“新冠肺炎”
.
新冠肺炎主要通过飞沫传播和接触
传播
.
人体感染新冠病毒后常见症状有呼吸道感染
,
发热
,
咳嗽
,
气促
,
呼吸困难等
[2].
新型冠状病
毒具有高传染性
,
目前针对新型冠状病毒的疫苗已经大规模投放使用
,
但是临床上依然没有有效的
抗病毒药物
.
在全球新冠疫情暴发的大背景下,早日研发出特效药物至关重要
.
目前的潜在疗法集
中于抑制或阻断病毒在体内的复制
,
通过注射
ACE2
人工抗体中和病毒被认为是一种有效的手段
.
病毒进入人体后
,
病毒会与细胞表面的
ACE2
受体结合并内在化
,
通过胞吞使其进入细胞
,
通过膜
融合
,
病毒的
RNA
被释放到细胞质中
,
从而引发病毒感染
.
注射
ACE2
受体可以有效避免病毒与
细胞表面的
ACE2
受体结合
,
从而可以达到避免健康细胞被感染的效果
.
建立数学模型来研究病毒
在体内的传播规律具有重要意义
.
本文将通过建立数学模型来研究这一潜在疗法的治疗效果
.
本文
结构如下
:
在第二部分
,
我们建立模型并对模型进行分析
,
我们首先证明了模型解的正有界性
.
其次
对平衡点及其稳定性进行分析
,
在证明过程中我们引入了基本再生数
R
0
,在第三部分
,
我们通过数
DOI:10.12677/aam.2022.111059517
应用数学进展
支从安,马春鸽
值模拟证明了上述结果
.
2.
模型建立及分析
2.1.
模型建立
建立数学模型来研究病毒在体内的传播规律具有重要意义
,1997
年
Bonhoeffer
和
May
建立了
关于
HIV
和
CD4+T
细胞的简单数学模型
[3]
˙
x
=
λ
−
αxv
−
d
1
x,
˙
y
=
αxv
−
d
2
y,
˙
v
=
ky
−
d
3
v,
(2.1)
其中
x,y,v
分别代表健康细胞
,
被病毒感染的细胞和病毒的数量
.
该模型被称为病毒动力学基本
模型
.1999
年
,Perelson
和
Nelson
在此模型的基础上考虑健康的
CD4+T
细胞以
logisitic
形式增
长
[4].
此后研究者们在此工作基础上考虑细胞免疫
,
体液免疫
,
治疗
,
时滞等因素建立大量的模
型
[5–7].
在本文中
,
我们在基本模型的基础上考虑缺损性干扰粒子的作用以及体液免疫
,
建立模型
如下
:
˙
x
=
λ
−
αxv
−
d
1
x,
˙
y
=
αxv
−
d
2
y,
˙
v
=
ky
−
d
3
v
−
ρwv,
˙
w
=
δ
−
d
4
w,
˙
u
=
ρwv
−
d
5
u.
(2.2)
其中
x
,
y
,
v
,
w
,
u
分别是健康的细胞
,
被病毒感染的细胞
,
病毒
,
注射了人造
ACE2
受体的细胞
,
被人造
ACE2
受体结合的病毒
.
λ
,
α
,
ρ
,
δ
分别代表健康细胞的生成率
,
健康细胞的感染率
,
人造
ACE2
受体与病毒的结合率
,
病毒的繁殖率
,
人造
ACE2
受体的注射率
.
d
1
,
d
2
,
d
3
,
d
4
,
d
5
分别代表
健康细胞的自然死亡率
,
被病毒感染的细胞的自然死亡率
,
病毒的自然死亡率
,
注射了人造
ACE2
受体的细胞的自然死亡率
,
被人造
ACE2
受体结合的病毒的自然死亡率。
2.2.
解的正不变性与有界性分析
假设系统的初始条件都大于零
,
即
x
(0)=
x
0
>
0
,y
(0)=
y
0
>
0
,v
(0)=
v
0
>
0
,w
(0)=
w
0
>
0
,u
(0)=
u
0
>
0
.
(2.3)
因为系统
(2.2)
的右端满足
Lipschitz
条件
,
在满足初始条件
(2.3)
的情况下
,
方程有唯一解
.
下面我
们来证明解的正不变性与有界性
.
DOI:10.12677/aam.2022.111059518
应用数学进展
支从安,马春鸽
定理
2.1.
(2.2)
.
证明
.
从系统
(2.2)
的第
1
个方程我们可以得到
x
(
t
)=
e
−
∫
t
0
(
d
1
+
αv
(
p
))
dp
x
(0)+
λ
∫
t
0
e
−
∫
t
p
(
d
1
+
αv
(
q
))
dq
dp
所以当
t
>
0
,x
(0)
>
0
时
,
x
(
t
)
>
0
.
同理可证
w
(
t
)
>
0
.
接下来证明对于所有的
t
>
0
,
y
(
t
)
和
v
(
t
)
大于
0
.
假设
t
1
,
t
2
分别是
y
(
t
)
,
v
(
t
)
第一次等于
0
,
令
t
0
=
min
{
t
1
,t
2
}
,
讨论下面的三种情况
.(1)
当
t
0
=
t
1
时
,
有
y
(
t
)
>
0
,v
(
t
)
>
0
,t
∈
[0
,t
1
)
,y
(
t
1
)=0
,v
(
t
1
)
>
0
,t
=
t
1
.
由系统
(2.2)
的第
2
个
方程得
,
˙
y
|
t
=
t
1
=
αx
(
t
1
)
v
(
t
1
)
>
0
.
即
lim
t
→
t
−
1
y
(
t
)
−
y
(
t
1
)
t
−
t
1
>
0
,
从而
y
(
t
)
<y
(
t
1
)=0
,
这与
y
(
t
)
>
0
,t
∈
[0
,t
1
)
矛盾
.(2)
当
t
0
=
t
2
时
,
有
y
(
t
)
>
0
,v
(
t
)
>
0
,t
∈
[0
,t
2
)
,y
(
t
2
)
>
0
,v
(
t
2
)=0
,t
=
t
2
.
由系统
(2.2)
的第
3
个方程得
,
˙
v
|
t
=
t
2
=
ky
(
t
2
)
>
0
.
即
lim
t
→
t
−
2
v
(
t
)
−
v
(
t
2
)
t
−
t
2
>
0
,
从而
v
(
t
)
<v
(
t
2
)=0
,
这与
v
(
t
)
>
0
,t
∈
[0
,t
2
)
矛盾
.(3)
当
t
0
=
t
1
=
t
2
时
,
由系统
(2.2)
的第
2
个方程
y
(
t
)=
e
−
d
2
t
y
(0)+
∫
t
0
αx
(
p
)
v
(
p
)
e
−
d
2
(
t
−
p
)
dp.
(2.4)
在
(2.4)
中
,
令
t
=
t
0
时
,
有
y
(
t
0
)=
e
−
d
2
t
0
y
(0)+
∫
t
0
0
αx
(
p
)
v
(
p
)
e
−
d
2
(
t
0
−
p
)
dp>e
−
d
2
t
0
y
(0)
>
0
.
这与
y
(
t
0
)=0
矛盾
,
从而
y
(
t
)
>
0
,
v
(
t
)
>
0
.
由
u
(
t
)
>
0
,
v
(
t
)
>
0
易证
u
(
t
)
>
0
.
综上
,
定理可
证
.
定理
2.2.
(2.2)
.
证明
.
首先
,
由系统
(2.2)
的第
4
个方程得
,
w
(
t
)=
e
−
d
4
t
w
(0)+
δ
∫
t
0
e
−
d
4
(
t
−
p
)
dp.
易得
w
(
t
)
是有界的
.
令
h
(
t
)=
x
(
t
)+
y
(
t
)
,
则
˙
h
(
t
)=
λ
−
d
1
x
−
d
2
y<λ
−
d
(
x
+
y
)
.
其中
d
=
min
{
d
1
,d
2
}
.
即有
{
˙
h
(
t
)
<
0
,
当
x
+
y>
λ
d
,
˙
h
(
t
)
>
0
,
当
x
+
y<
λ
d
.
DOI:10.12677/aam.2022.111059519
应用数学进展
支从安,马春鸽
从而
x
(
t
)
,y
(
t
)
有界
.
最后证明
v
(
t
)
,u
(
t
)
是有界的
,
由于
y
(
t
)
是有界的
,
所以存在常数
L,
使得
ky<L
令
l
(
t
)=
v
(
t
)+
u
(
t
)
,
则
˙
l
(
t
)=
ky
−
d
3
v
−
d
5
u<L
−
d
′
(
v
+
u
)
.
其中
d
′
=
min
{
d
3
,d
5
}
.
即有
˙
l
(
t
)
<
0
,
当
v
+
u>
L
d
′
,
˙
l
(
t
)
>
0
,
当
v
+
u<
L
d
′
.
从而
v
(
t
)
,u
(
t
)
是有界的
.
综上,定理得证
.
2.3.
平衡点及其稳定性分析
首先我们来讨论平衡点的存在性
.
定理
2.3.
R
0
<
1
,
(2.2)
E
0
;
R
0
>
1
,
(2.2)
E
0
E
1
,
R
0
=
kαλd
4
d
1
d
2
d
3
d
4
+
d
1
d
2
ρδ
,
E
0
=(
λ
d
1
,
0
,
0
,
δ
d
4
,
0)
,E
1
=(
x
1
,y
1
,v
1
,w
1
,u
1
)
.
证明
.
由
λ
−
αxv
−
d
1
x
=0
αxv
−
d
2
y
=0
ky
−
d
3
v
−
ρwv
=0
δ
−
d
4
w
=0
ρwv
−
d
5
u
=0
得到两个平衡点
E
0
=(
λ
d
1
,
0
,
0
,
δ
d
4
,
0)
E
1
=(
x
1
,y
1
,v
1
,w
1
,u
1
)
其中
x
1
=
d
2
d
3
d
4
+
d
2
ρδ
αkd
4
,
y
1
=
λαkd
4
−
d
1
d
2
d
3
d
4
−
d
1
d
2
ρδ
kd
2
d
4
,
v
1
=
λαkd
4
−
d
1
d
2
d
3
d
4
−
d
1
d
2
ρδ
α
(
d
2
d
3
d
4
+
d
2
ρδ
)
,
w
1
=
δ
d
4
,
u
1
=
(
λαkd
4
−
d
1
d
2
d
3
d
4
−
d
1
d
2
ρδ
)
ρδ
(
d
2
d
3
d
4
+
d
2
ρδ
)
d
4
d
5
.
DOI:10.12677/aam.2022.111059520
应用数学进展
支从安,马春鸽
直接计算可得
,
当
R
0
>
1
时
,
λαkd
4
−
d
1
d
2
d
3
d
4
−
d
1
d
2
ρδ
kd
2
d
4
>
0
,
λαkd
4
−
d
1
d
2
d
3
d
4
−
d
1
d
2
ρδ
α
(
d
2
d
3
d
4
+
ρδ
)
>
0
,
(
λαkd
4
−
d
1
d
2
d
3
d
4
−
d
1
d
2
ρδ
)
ρδ
(
d
2
d
3
d
4
+
d
2
ρδ
)
d
4
d
5
>
0
.
从而当
R
0
>
1
时
,
E
1
是正平衡点
.
下面分析平衡点的稳定性
,
为了方便
,
我们将系统
(2.2)
的平衡点简记为
E
=(
x,y,v,w,u
)
,
下
面可得系统
(2.2)
在点
E
处的雅可比矩阵
J
(
E
)=
−
αv
−
d
1
0
−
αx
00
αv
−
d
2
αx
00
0
k
−
d
3
−
ρwρv
0
000
−
d
4
0
00
ρwρv
−
d
5
.
我们首先来分析无病平衡点
E
0
的局部渐近稳定性
.
定理
2.4.
R
0
<
1
,
E
0
.
证明
.
系统
(2.2)
在
E
0
点处的雅可比矩阵为
J
0
=
−
d
1
0
−
α
λ
d
1
00
0
−
d
2
α
λ
d
1
00
0
k
−
d
3
−
ρ
δ
d
4
00
000
−
d
4
0
00
ρ
δ
d
4
0
−
d
5
.
直接计算
,
得
E
0
点处的特征方程为
det
(
J
0
−
rI
)=
−
(
d
1
+
r
)(
d
4
+
r
)(
d
5
+
r
)
[
r
2
+(
d
2
+
d
3
d
4
+
ρδ
d
4
)
r
+
d
1
d
2
d
3
d
4
+
d
1
d
2
ρδ
−
d
4
kαλ
d
1
d
4
]
.
显然
,
方程有三个负实数根
r
1
=
−
d
1
,r
2
=
−
d
4
,r
3
=
−
d
5
.
注意到
,
r
2
+(
d
2
+
d
3
d
4
+
ρδ
d
4
)
r
+
d
1
d
2
d
3
d
4
+
d
1
d
2
ρδ
−
d
4
kαλ
d
1
d
4
=0
.
的根皆有负实部当且仅当
d
1
d
2
d
3
d
4
+
d
1
d
2
ρδ
−
d
4
kαλ
d
1
d
4
>
0
成立
,
即
R
0
<
1
.
从而当
R
0
<
1
时
,
平衡点
E
0
是局部渐近稳定的
.
接下来分析平衡点
E
0
的全局稳定性
.
定理
2.5.
R
1
<
1
,
E
0
,
R
1
=
kαλ
d
1
d
2
d
3
.
DOI:10.12677/aam.2022.111059521
应用数学进展
支从安,马春鸽
证明
.
我们构造李雅普诺夫函数如下
,
L
=
1
2
(
x
−
λ
d
1
)
2
+
λ
d
1
y
+
d
2
λ
d
1
k
v
+
1
2
(
w
−
δ
d
4
)
2
+
d
2
λ
d
1
k
u.
我们得到
L
′
=(
x
−
λ
d
1
)
x
′
+
λ
d
1
y
′
+
d
2
λ
d
1
k
v
′
+(
w
−
δ
d
4
)
w
′
+
d
2
λ
d
1
k
u
′
=(
x
−
λ
d
1
)(
λ
−
αxv
−
d
1
x
)+
λ
d
1
(
αxv
−
d
2
y
)+
d
2
λ
d
1
k
(
ky
−
d
3
v
−
ρwv
)+(
w
−
δ
d
4
)(
δ
−
d
4
w
)
+
d
2
λ
d
1
k
(
ρwy
−
d
5
u
)
=
−
d
1
(
x
−
λ
d
1
)
2
−
αv
(
x
−
λ
d
1
)
2
+(
α
λ
2
d
2
1
−
λd
2
d
3
d
1
k
)
v
−
λd
2
d
5
d
1
k
u
−
d
4
(
w
−
δ
d
4
)
2
.
显然当
R
1
<
1
时
,
α
λ
2
d
2
1
−
λd
2
d
3
d
1
k
<
0
,
则
L
′
≤
0
.
而且在此条件下
L
′
=0
当且仅当
x
=
λ
d
1
,w
=
δ
d
4
,v
=0
,u
=0
.
从而由
Lasell
不变原理
[8]
可知
,
平衡点
E
0
是全局稳定的
.
从而当
R
1
<
1
时
,
平
衡点
E
0
是全局稳定的
.
最后分析平衡点
E
1
的局部渐近稳定性
.
定理
2.6.
R
0
>
1
,
E
1
.
证明
.
系统
(2.2)
在
E
1
点处的雅可比矩阵为
,
J
1
=
−
αv
1
−
d
1
0
−
αx
1
00
αv
1
−
d
2
αx
1
00
0
k
−
d
3
−
ρw
1
ρv
1
0
000
−
d
4
0
00
ρw
1
ρv
1
−
d
5
.
直接计算
,
得
E
1
点处的特征方程为
,
det
(
J
1
−
rI
)=
−
(
d
4
+
r
)(
d
5
+
r
)
D
(
r
)
.
其中
,
D
(
r
)=
a
3
r
3
+
a
2
r
2
+
a
1
r
+
a
0
a
3
=1
,
a
2
=
d
2
+
d
3
+
ρδ
d
4
+
d
1
R
0
,
a
1
=(
d
3
+
ρδ
d
4
)
d
1
R
0
+
d
1
d
2
R
0
,
a
0
=
d
1
d
2
(
d
3
+
ρδ
d
4
)(
R
0
−
1)
.
DOI:10.12677/aam.2022.111059522
应用数学进展
支从安,马春鸽
显然
,
方程有两个负实特征根
r
1
=
−
d
4
,r
2
=
−
d
5
.
我们考虑
D
(
r
)=0
的特征根的符号
,
通过
Routh-Hurwitz
判据
[9],
我们知道
D
(
r
)=0
的所有根有负的实部当且仅当
a
3
>
0
,a
2
>
0
,a
1
>
0
,a
0
>
0
a
1
a
2
−
a
0
a
3
>
0
.
显然
,
当
R
0
>
1
时
,
a
i
>
0(
i
=0
,
1
,
2
,
3)
最后计算
a
1
a
2
−
a
0
a
3
=(
d
2
+
d
3
+
ρδ
d
4
+
d
1
R
0
)[(
d
3
+
ρδ
d
4
)
d
1
R
0
+
d
1
d
2
R
0
]
−
d
1
d
2
(
d
3
+
ρδ
d
4
)(
R
0
−
1)
=[(
d
3
+
ρδ
d
4
)
d
1
R
0
+
d
1
d
2
R
0
](
d
2
+
d
1
R
0
)+(
d
3
+
ρδ
d
4
)
2
d
1
R
0
+
d
1
d
2
(
d
3
+
ρδ
d
4
)
>
0
.
(2.5)
即
a
1
a
2
>a
0
a
3
.
因此得出当
R
0
>
1
时
,
D
(
r
)=0
的特征根都有负实部
,
则平衡点
E
1
是局部渐近
稳定的
.
3.
数值模拟
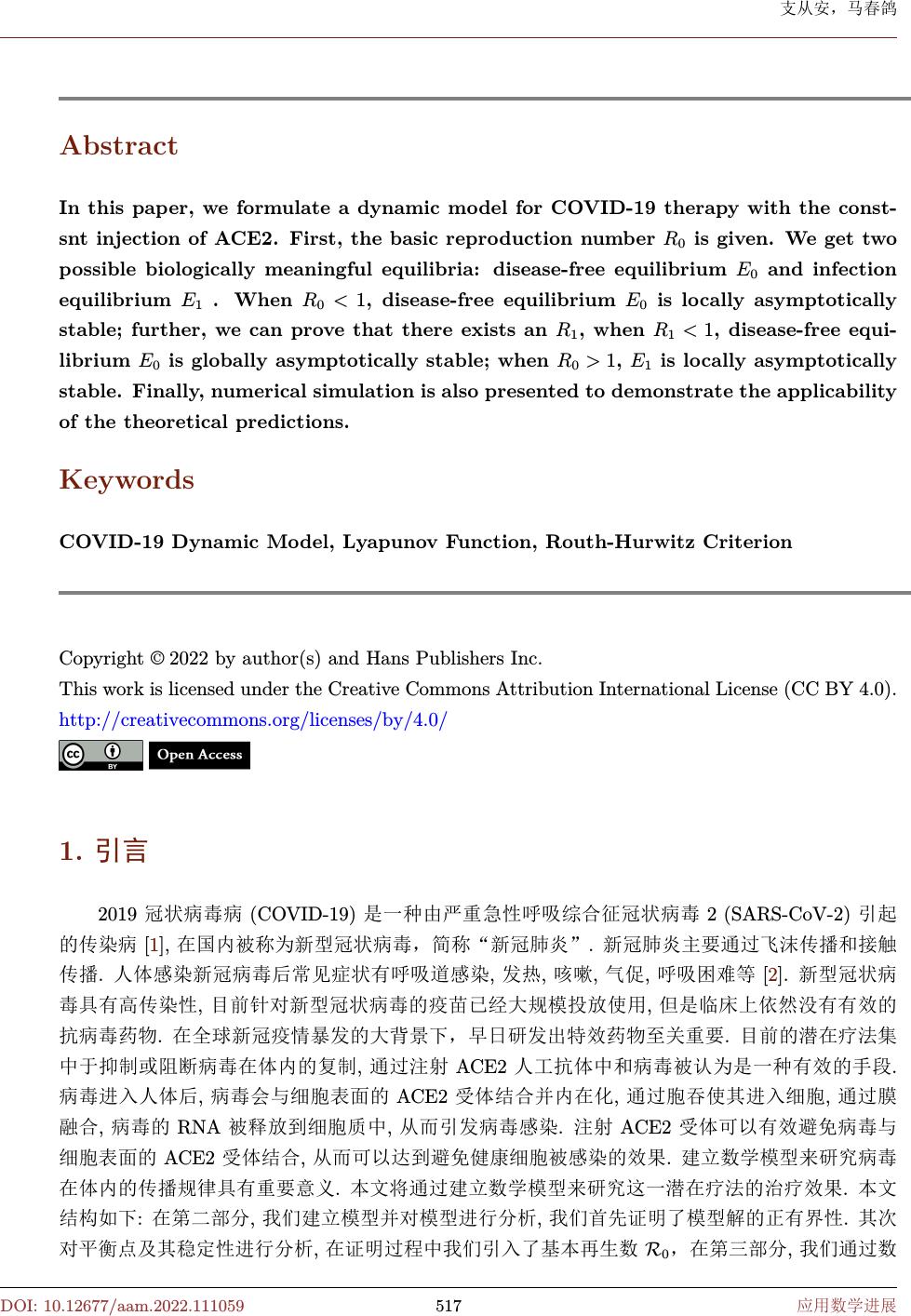
Figure1.
R
0
<
1
图
1.
R
0
<
1
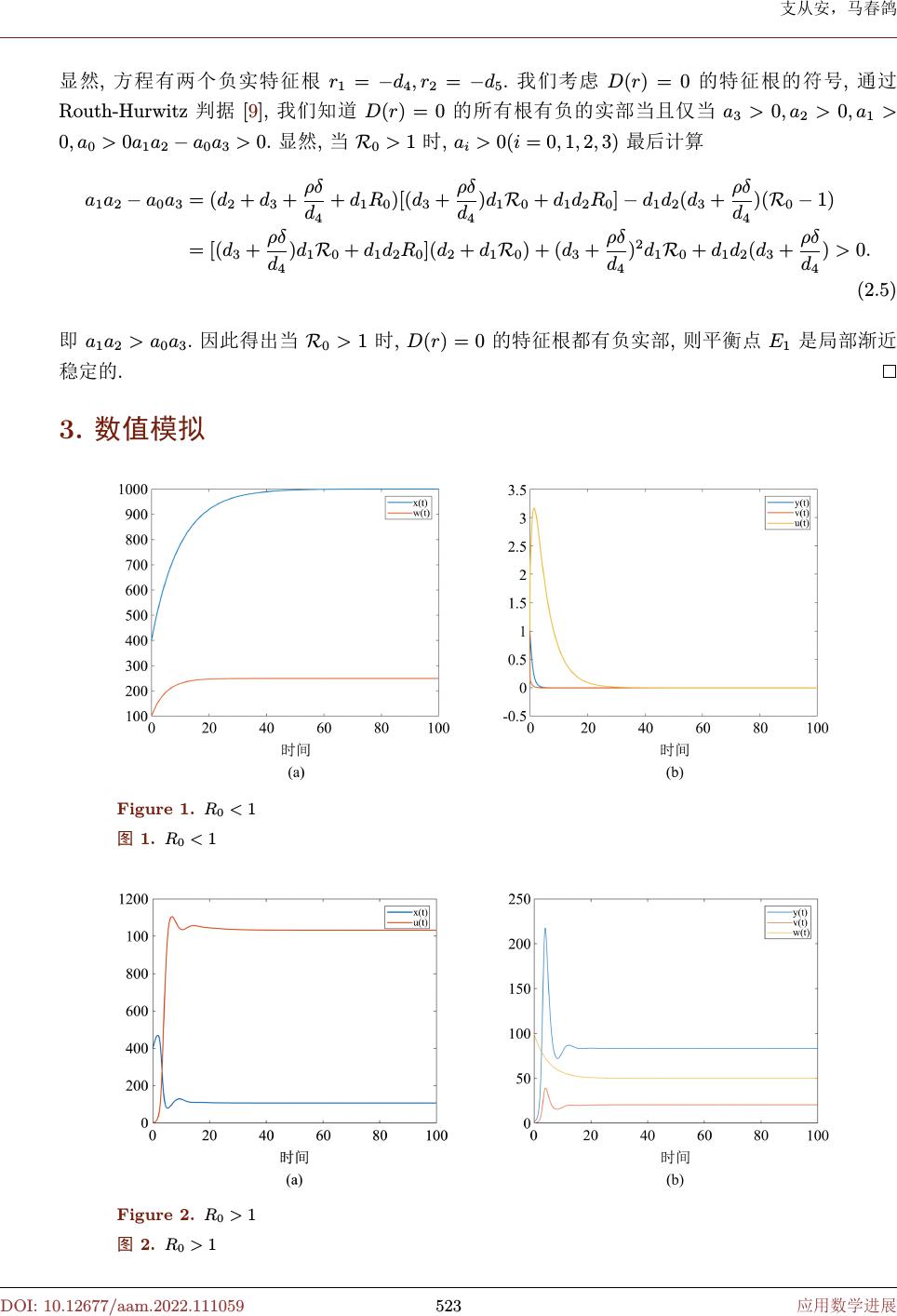
Figure2.
R
0
>
1
图
2.
R
0
>
1
DOI:10.12677/aam.2022.111059523
应用数学进展
支从安,马春鸽
根据以上结论
,
对平衡点的稳定性进行数值模拟
,
我们取
d
1
=0
.
1
,d
2
=1
.
07
,d
3
=2
.
4
,d
4
=
0
.
2
,λ
=100
,k
=3
.
07
,ρ
=0
.
2
.
当取
α
=0
.
0002
,δ
=50
,
此时
R
0
<
1
,
平衡点
E
0
稳定
(
如图
1).
当
我们选取参数
α
=0
.
02
,δ
=10
,
此时
R
0
>
1
,
平衡点
E
1
存在且稳定
(
如图
2).
4.
结论
本文主要研究常数注射率的人造
ACE2
受体治疗模型
,
我们得出当
R
0
<
1
时
,
系统
(2.2)
仅存在无病平衡点
E
0
;
当
R
0
>
1
时
,
系统
(2.2)
存在无病平衡点
E
0
和正平衡点
E
1
,
其中
R
0
=
kαλd
4
d
1
d
2
d
3
d
4
+
d
1
d
2
ρδ
,
E
0
=(
λ
d
1
,
0
,
0
,
δ
d
4
,
0)
,
E
1
=(
x
1
,y
1
,v
1
,w
1
,u
1
)
.
通过对模型的分析我们得出以
下结论
,
当
R
0
<
1
时
,
平衡点
E
0
是局部渐近稳定的
.
通过构造合理的李雅普诺夫函数我们得出
,
当
R
1
<
1
时
,
无病平衡点
E
0
是全局稳定的
,
由此可知我们可以通过增加人造
ACE2
受体的注射量
或者增强人造
ACE2
受体的靶向定位能力来减少体内冠状病毒的量
,
进而达到治疗的效果
.
参考文献
[1]Wu,Y.-C.,Chen,C.-S.andChan,Y.-J.(2020)TheOutbreakofCovid-19:AnOverview.
JournaloftheChineseMedicalAssociation
,
83
,217-220.
https://doi.org/10.1097/JCMA.0000000000000270
[2]Wang,D.,Hu,B.,Hu,C.,Zhu,F.,Liu,X.,Zhang,J.,Wang,B.,Xiang,H.,Cheng,Z.,
Xiong,Y.,
etal.
(2020)ClinicalCharacteristicsof138HospitalizedPatientswith2019Novel
Coronavirus-InfectedPneumoniainWuhan,China.
JAMA
,
323
,1061-1069.
https://doi.org/10.1001/jama.2020.1585
[3]Bonhoeffer,S.,May,R.M.,Shaw,G.M.andNowak,M.A.(1997)VirusDynamicsandDrug
Therapy.
ProceedingsoftheNationalAcademyofSciencesoftheUnitedStatesofAmerica
,
94
,6971-6976.https://doi.org/10.1073/pnas.94.13.6971
[4]Perelson,A.andNelson,P.(1999)MathematicalModelsofHIVDynamics:
InVivo
.
SIAM
Review
,
41
,3-44.https://doi.org/10.1137/S0036144598335107
[5]Zhou, X., Song, X. and Shi, X.(2008) A Differential Equation Model of HIVInfectionofCD4
+
t-CellswithCureRate.
JournalofMathematicalAnalysisandApplications
,
342
,1342-1355.
[6]Sun,X.andWei,J.(2015)Stability andBifurcationAnalysisinaViral InfectionModelwith
Delays.
AdvancesinDifferenceEquations
,
2015
,ArticleNo.332.
https://doi.org/10.1186/s13662-015-0664-7
[7]Zhang, T., Song,Y.,Jiang,Z.and Wang,J.(2020) DynamicalAnalysisofa DelayedHIV Virus
Dynamic Model with Cell-to-Cell Transmission and Apoptosis of Bystander Cells.
Complexity
,
2020
,ArticleID:2313102.https://doi.org/10.1155/2020/2313102
[8]LaSalle,J.P.(1976)TheStabilityofDynamicalSystems.SIAMPublications,Philadelphia.
https://doi.org/10.1137/1.9781611970432
DOI:10.12677/aam.2022.111059524
应用数学进展
支从安,马春鸽
[9]MacDuffee,C.C.(2012) The TheoryofMatrices,Volume 5. SpringerScienceBusinessMedia,
Berlin.
DOI:10.12677/aam.2022.111059525
应用数学进展