Smart Grid
Vol.06 No.01(2016), Article ID:17031,9
pages
10.12677/SG.2016.61005
Comparison of Identification Methods for Synchronous Generator Based on Six-Order Model
Wenting Cui
School of Automation and Electric Engineering, Qingdao University, Qingdao Shandong

Received: Feb. 8th, 2016; accepted: Feb. 26th, 2016; published: Feb. 29th, 2016
Copyright © 2016 by author and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
To make use of the PMU measured data more accurately for synchronous generator running state real-time monitoring, it is necessary to identify the parameters of synchronous generator in real time. Based on the salient-pole synchronous generator, its six-order parameter model is derived, which is transformed into a matrix form. Through the example simulation analysis, the excitation current and excitation voltage as control variables show that the two kinds of model identification results are basically the same. Considering the superiority of Matlab, the author uses the direct search algorithm in parameter identification and PSO to identify parameters and compare the advantage and disadvantages of the two optimization methods.
Keywords:Synchronous Generator, Parameter Identification, Matrix Form, PMU

基于六阶模型的同步发电机参数辨识方法比较
崔文婷
青岛大学自动化与电气工程学院,山东 青岛

收稿日期:2016年2月8日;录用日期:2016年2月26日;发布日期:2016年2月29日

摘 要
为使相量测量装置(PMU)的实测数据更加准确地对同步发电机的运行状态进行监测,有必要对同步发电机的参数进行实时辨识。本文把传统同步发电机六阶模型改写为矩阵形式,分别采用励磁电流与励磁电压作为控制变量,比较两种控制策略的异同,通过仿真实例分析发现两种模型的辨识结果基本一致。在优化算法上,考虑到Matlab处理矩阵的优越性,笔者采用矩阵形式的直接搜索算法与粒子群优化算法对参数进行辨识,并比较了两种优化方法的优劣性。
关键词 :同步发电机,参数辨识,矩阵形式,PMU

1. 引言
随着电网的不断发展与扩大,电网的可靠性与安全性也越来越受到人们的重视。同步发电机作为电网中极为重要的一个环节,若同步发电机的参数与实际偏差过大则会对电网的安全产生极大的威胁,故对同步发电机参数的准确性有越来越高的要求[1] [2] 。因此,通过参数辨识得到较为准确的同步发电机的参数对电网安全性分析有极为重要的意义。
迄今为止,人们已经提出了大量的同步发电机数学模型,针对不同的研究和工况要求,可采用不同的模型,较多采用的是同步发电机的实用模型。同步发电机的六阶模型把同步电机转子q轴的整个暂态过程用时间常数的两个等值绕组来描述,所以它的精确度更好 [3] [4] 。在PMU装置实用之前,电网缺乏统一时标下动态响应数据的测量,阻碍了对电力系统仿真可信度的研究。伴随PMU装置的普遍使用,能够对大电网进行动态检测和实时的数据记录,为同步发电机参数辨识提供数据基础 [5] - [7] 。它的显著特点是,辨识所用的数据是电机在实际运行工况下测量得到的,考虑了运行过程中的各种因素,结果可包含电机实际运行时各种效应。该辨识方法简单,在较好反映电机动态行为的情况下,不需要做假设且不影响电机使用 [8] [9] 。
本文以隐极同步发电机的六阶实用参数模型为基础,将其进行变换并改写成矩阵形式,分别用励磁电压与励磁电流做控制变量,且利用Matlab语言在矩阵处理上的优越性,不采用智能算法。以内蒙古托克托1号机组2010年4月15日14点03分00秒至02秒的PMU数据进行辨识,以此对比用励磁电压与励磁电流做控制变量的参数辨识结果,且对比了基于矩阵形式的直接搜索算法与粒子群优化算法对参数辨识结果的优劣性 [10] 。
2. 同步发电机数学模型
同步发电机的实用参数模型根据不同场合对发电机参数的要求,常对同步发电机的数学模型做不同程度的简化。二阶模型只计及同步发电机转子的机械动态行为,忽略所有电磁暂态效应而使其与电网直接的接口变得简单,一般在分析远离扰动发生地点的发电机转子暂态时可以优先使用。当需要计及励磁系统暂态效应时,最简单的模型就是三阶模型,它广泛的应用于精度要求不高,但仍需要计及励磁系统暂态的电力系统分析中。五阶模型忽略了定子暂态过程及转子q轴瞬变过程,计及转子励磁绕组、阻尼绕组作用,即考虑f,d,q绕组电磁暂态以及转子运动的机电暂态。该模型应用于对电力系统暂态稳定分析的精度要求较高的场合。当要计及转子超瞬变过程,且转子q轴要考虑g绕组时,则五阶实用模型要增加一阶,即为六阶实用模型。五阶模型一般更适用于水轮机,而六阶模型有利于描写实心转子的汽轮机,对汽轮机转子q轴的整个暂态过程用时间常数不同的两个等值绕组,即反映瞬变过程的g绕组和反应超瞬变过程的q绕组来描写,这比五阶实用模型更为精确。
本文选用汽轮机做辨识样机,故选用对汽轮机标书更加准确的六阶模型作为参数辨模型。由于本文只考虑电气量参数辨识,因此,不计及转子运动方程的影响,只采用发动机电气量方程。同步发电机的六阶模型可以采用两种变量来做控制变量,一种是励磁电压作为控制变量,另一种是用励磁电流作为控制变量。
2.1. 励磁电压作为控制变量
模型如下:
d轴电气模型
 (1)
(1)
q轴电气模型:
 (2)
(2)
2.2. 励磁电流作为控制变量
模型如下:
d轴电气模型:
 (3)
(3)
q轴电气模型:
 (4)
(4)
通过观察式(1)~(4)可以得知,电气部分的模型在的d,q轴上是可以分开求解的,即d轴和q轴是解耦的,因此可以将模型分成d轴和q轴独立求解,这样处理有利于降低方程维数,减少每次的待辨识参数个数。
3. 同步发电机参数辨识方案
考虑到电机稳态参数可以根据电机稳态运行数据提前提取的特点,可对电机稳态参数进行前期计算,得到电机的稳态参数,并对其进行分析研究,之后建立同步发电机数学模型,采用合适的量作为输入,对其他参数进行辨识。
参数辨识的流程如图1所示。
3.1. 目标函数的建立
因为d轴和q轴可以分开求解,所以分别建立d轴、q轴的目标函数。从式(1)~(4)可知,由式 和
和 计算可以的到id,与iq,利用计算得到的id与iq与实测的
计算可以的到id,与iq,利用计算得到的id与iq与实测的 与
与 的误差平方和作为目标函数,从而进行寻优辨识。d轴与q轴的目标函数如下:
的误差平方和作为目标函数,从而进行寻优辨识。d轴与q轴的目标函数如下:
 (5)
(5)
 (6)
(6)
式(5)式(6)中Jd、Jq分别表示d轴目标函数和q轴目标函数;id表示d轴求解电流值; 表示d轴实测数值;iq表示q轴求解电流值;
表示d轴实测数值;iq表示q轴求解电流值; 表示q轴实测数值。
表示q轴实测数值。
目标函数作为个体适应度,在寻优算法中是判断个体优劣的直接标准,同时该函数的最终值的大小也是判断辨识结果好坏的主要量化指标,该值越小,表示辨识结果越理想。
3.2. 参数辨识求解模型的建立
以d轴为例,若用励磁电压做控制变量,对d轴电机模型式(1)进行矩阵变化,得
 (7)
(7)

Figure 1. The process of parameter identification of synchronous generator
图1. 同步发电机参数辨识过程
记上式中

则式(7)的矩阵形式为:
 (8)
(8)
若用励磁电流做控制变量,则

采用改进的Euler对发电机电气状态进行求解,该算法属于隐式算法具有良好的稳定性,且其具有二阶精度,因此具有良好的用于数值计算的特性。改进的Euler法的原理是:先利用Euler公式求的一个预测值 ,再用梯形公式将其校正一次,得到校正值
,再用梯形公式将其校正一次,得到校正值 ,得这样建立的预测–校正方法通常称为改进的Euler法。根据方程的矩阵形式以及改进Euler法的基本原理,可得迭代通式为:
,得这样建立的预测–校正方法通常称为改进的Euler法。根据方程的矩阵形式以及改进Euler法的基本原理,可得迭代通式为:
 (9)
(9)
3.3. 寻优算法设计
考虑到PMU实测数据参数中存在大量稳态数据,所以便实施采用先利用稳态数据分别准确计算出d轴q轴稳态参数,将稳态参数固定,在利用暂态数据进行其他参数辨识的方法。稳态参数计算是先利用稳态公式(10)求q轴的同步电抗xq
 (10)
(10)
在隐极式同步发电机中xd = xq,求得q轴同步电抗xd,在求得xd后,求取稳态参数K
励磁电压作为控制变量时
 (11)
(11)
式中ufd为励磁电压。
励磁电流作为控制变量
 (12)
(12)
式中ifd为励磁电压。
记d轴的参数向量为

记q轴的参数向量为

对满足xd = xq的前提下,设定参数向量的搜索范围为20%上下,认为在此范围内参数基本恒定。
4. 算例验证
采用PMU数据进行辨识,选取托克托1号机组2010年4月15日14点03分00秒至02秒数据。
用励磁电压作为控制变量时,对d轴和q轴参数的辨识结果如表1、表2所示。图2、图3为q轴与d轴的电流拟合曲线。
用励磁电流作为控制变量时对d轴和q轴参数的辨识结果如表3、表4所示。图4、图5为q轴与d轴的电流拟合曲线。
比较用励磁电压与励磁电流做控制变量的参数辨识结果可知,两种模型的参数辨识结果相差不大,造成结果不同的主要原因是测量时产生的误差与计算过程中产生的误差,对参数辨识的影响在可以接受的范围内,即两种模型都可以在实际中应用。且电动机参数的辨识值与参数值基本一致,验证了方法的准确性。
本文以励磁电压做控制变量的六阶同步发电机模型为例,比较了基于矩阵形式的直接搜索算法与粒子群优化算法对参数辨识的影响,如表5所示。
由表5的比较结果可以看出,粒子群优化算法的计算时间要比直接搜索算法所用时间长,循环次数要多,且粒子群优化算法的目标函数值大,即粒子群优化算法的精确度不如直接优化算法,同时直接优化算法利用Matlab对处理矩阵的优越性使编程更加简单明了,所以基于矩阵形式的直接搜索算法由于粒子群优化算法。

Table 1. Identification results of d axis
表1. 同步发电机d轴参数辨识结果
Table 2. Identification results of q axis
表2. 同步发电机q轴参数辨识结果
Table 3. Identification results of d axis
表3. 同步发电机d轴参数辨识结果
Table 4. Identification results of q axis
表4. 同步发电机q轴参数辨识结果
Table 5. Comparison of algorithms
表5. 算法的比较

Figure 2. The current fitting curve of d axis
图2. d轴电流拟合曲线

Figure 3. The current fitting curve of q axis
图3. q轴电流拟合曲线
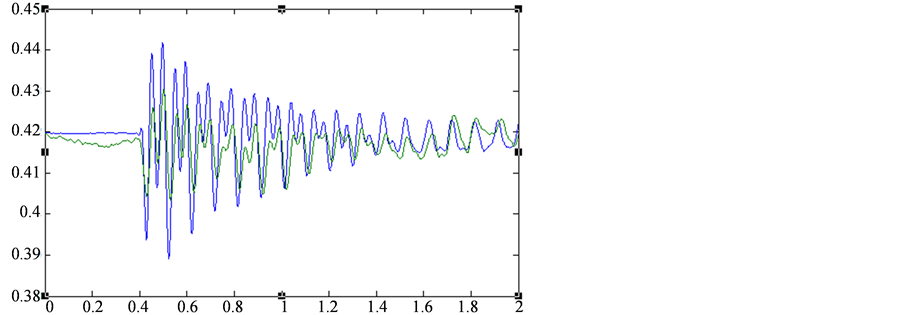
Figure 4. The current fitting curve of d axis
图4. d轴电流拟合曲线

Figure 5. The current fitting curve of q axis
图5. q轴电流拟合曲线
5. 结论
由本文以隐极同步发电机的六阶实用模型为基础,分别采用两种变量做控制变量的模型,得出两种模型在参数辨识过程中差别不大的结论,即两种模型都可以在实际中应用。利用Matlab在矩阵处理上的优越性,优化了求解微分方程算法的复杂度。通过比较基于矩阵形式的直接搜索法与粒子群优化算法的计算时间及空间储存等,得出基于矩阵形式的直接搜索法求解优于粒子群优化算法的求解。
在实际应用过程中,可以根据实际情况具体选择励磁电流做控制变量或励磁电压做控制变量,同时,将模型矩阵化后积累误差小且编程简单,是一种实用且方便的辨识方法。
文章引用
崔文婷. 基于六阶模型的同步发电机参数辨识方法比较
Comparison of Identification Methods for Synchronous Generator Based on Six-Order Model[J]. 智能电网, 2016, 06(01): 38-46. http://dx.doi.org/10.12677/SG.2016.61005
参考文献 (References)
- 1. 倪以信, 陈寿涛, 张宝霖. 动态电力系统的理论和分析[M]. 北京: 清华大学出版社, 2002.
- 2. Kundur, P. 电力系统稳定与控制[M]. 北京: 中国电力出版社, 2002.
- 3. deMello, F.P. and Ribeiro, J.R. (1977) Derivation of Syn-chronous Nachine Parameters Fromtests. IEEE Transaction on PAS, 96, 1211-1218. http://dx.doi.org/10.1109/T-PAS.1977.32443
- 4. Karrari, M. and Malik, O.P. (2004) Identification of Physical Parameters of a Synchronous Generator from Online Measurements. IEEE Transaction on EC, 19, 407-415. http://dx.doi.org/10.1109/tec.2003.822296
- 5. Huang, C.-T., Chen, Y.-T., Chuang, H.-L., et al. (1994) On-Line Measurement Based Model Parameter Estimation for Synchronous Generators: Model Development and Identification Schemes. IEEE Transaction on EC, 9, 330-336.
- 6. 鞠平. 电力系统非线性辨识[M]. 南京: 河海大学出版社, 1999: 12.
- 7. 岳陈熙. 基于GPS-PMU的同步发电机参数辨识研究[D]: [硕士学位论文]. 南京: 河海大学, 2005: 3.
- 8. 孙昊. 基于PMU实测数据的同步发电机参数在线辨识方法[J]. 电力系统控制与应用, 2014, 42(3): 31-36.
- 9. 韩超先. 基于PMU数据同步发电机参数辨识[D]: [硕士学位论文]. 青岛: 青岛大学, 2012: 6.
- 10. 黄平. 粒子群算法改进及其在电力系统的应用[D]: [博士学位论文]. 广州: 华南理工大学, 2012: 6