Mechanical Engineering and Technology
Vol.05 No.02(2016), Article ID:17893,7
pages
10.12677/MET.2016.52012
Thermal Spray Trajectory Planning Based on Virtual Simulation
Qiuyu Yang, Yanjun Zhang*, Shiqi Zhang, Youquan Xu
College of Mechanical Engineering, Yangzhou University, Yangzhou Jiangsu

Received: Jun. 4th, 2016; accepted: Jun. 24th, 2016; published: Jun. 28th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Thermal spray is one of the efficient technologies that is used for surface treatment. The parameters of thermal spray is analyzed, the virtual environment is established, the spray robot model is presented, the spay path is simulated and the approach for path planning of thermal spray is proposed based on virtual simulation. A case study of blade surface spray path planning is provided which indicates that the approach proposed is valid and feasible.
Keywords:Surface Treatment, Thermal Spray, Path Planning, Simulation

基于虚拟仿真的热喷涂轨迹规划方法
杨秋宇,张燕军*,张诗琪,许友权
扬州大学机械工程学院,江苏 扬州

收稿日期:2016年6月4日;录用日期:2016年6月24日;发布日期:2016年6月28日

摘 要
热喷涂技术是表面工程领域内表面改性最有效的技术之一。本文在分析热喷涂系统组成与工艺参数的基础上,从虚拟环境构建、机器人建模及喷涂轨迹仿真等方面给出了面向工件表面热喷涂的机器人轨迹规划方法,并通过某型叶片表面轨迹规划的实例分析,验证了方法的有效性、可行性。
关键词 :表面工程,热喷涂,轨迹规划,仿真

1. 引言
随着现代机械行业的迅猛发展,对所用材料的性能要求不断提高,其中,工件表面热喷涂是一种综合效益较高的技术。随着机器人控制速度和精度的不断提高,由工业机器人去完成对工件表面喷涂作业已经使用的愈发广泛 [1] [2] 。
早期的热喷涂机器人编程主要是利用示教编程,将机器人设置为手动操作模式,在喷涂工件上设定机器人运动轨迹所经过的若干个点,程序员操作机器人以设定好的参数运动到每一个点上,并即时记录下机器人上显示的每个点的坐标,通过对各离散点的拟合组成机器人的运动轨迹。这种方法对于简单几何体可以满足喷涂需求,但并不普适于复杂工件表面,存在运动轨迹精度低、喷涂效果不理想等问题。
针对机器人热喷涂过程中存在的问题,为得到较为理想的工件表面喷涂轨迹,本文将分析影响喷涂质量的重要参数,构建热喷涂机器人及喷涂可视化仿真的虚拟环境,提出面向工件表面热喷涂的机器人空间轨迹规划的方法,基于热喷涂机器人离线编程,实现热喷涂机器人的轨迹规划。
2. 热喷涂工艺分析
2.1. 热喷涂系统的组成
热喷涂是利用某种热源,如电弧、等离子弧、燃烧火焰等将粉末状或丝状的金属和非金属涂层材料加热到熔融或半熔融状态后,借助焰流本身的动力或外加的高速气流雾化以一定的速度喷射到经过预处理的基体材料表面,从而与基体材料结合形成的具有各种功能的表面覆盖涂层 [3] 。热喷涂系统一般包括喷涂设备及其辅助设备,如图1所示。
2.2. 热喷涂工艺参数
影响热喷涂的主要工艺参数涉及送粉量、喷涂距离、喷涂角度等。针对等离子喷涂,一般选用氮气或氩气作为等离子喷涂的主气,用氢气作为辅助气体;送粉量的大小是影响涂层组织结构和沉积效率的重要参数,若送粉量过大,不仅降低粉尘沉积效率,还会增加图层中孔洞和未熔粒子数量,导致涂层质量下降;若送粉量过小,除增大喷涂成本外,还可能造成零件过热,涂层开裂等不良后果 [3] 。喷涂距离对涂层的影响主要是由于粒子在不同距离处的速度不同,喷涂距离太大或太小都将影响涂层的结合性能,喷涂角度则对涂层结合强度产生影响。
3. 机器人轨迹规划方法
机器人喷涂轨迹规划包括运动参数分析、仿真环境构建,工件与工具建模等过程,其流程图如下图2所示。
3.1. 影响热喷涂质量的参数分析
根据被喷涂工件的加工要求,从喷枪的喷涂角度,喷涂距离,移动速度等方面进行参数分析计算,
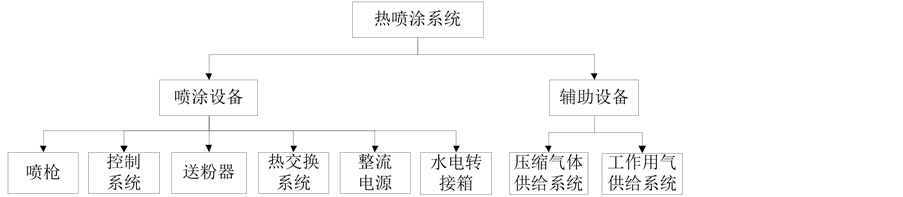
Figure 1. Composition of plasma spray system
图1. 等离子喷涂系统组成示意图

Figure 2. Trajectory planning flowchart
图2. 轨迹规划流程图
力求使喷涂层厚度均匀,从而建立热喷涂过程中运动学参数的模型。为了得到较好的涂层结构,喷枪方向应与工件被喷涂面的法线方向重合;并保证喷枪枪头与工件表面之间距离为某一定值;在确定喷枪移动速度时,应使其在直线,曲线,转弯等处速度均匀;根据喷涂的距离确定相邻路径之间的间距。
3.2. 热喷涂仿真环境的构建
a) 机器人工作环境的建模
热喷涂仿真环境由虚拟喷涂车间,机器人三维模型以及工作台三部分构成。以ABB机器人的轨迹规划为例,根据所需喷涂的工件和喷涂要求,综合考虑机器人工作范围、机器人所需承载的负荷、机器人各轴所需转过的角度等因素,在Robotstudio软件中选择相应型号的机器人,并通过CATIA或Solidworks等三维软件建立虚拟喷涂车间、工作台等三维模型,如图3所示。
b) 热喷涂喷枪及工件建模
根据所选型号的工业机器人,在综合考虑喷枪与枪工装的负载等限制条件,建立对应型号的喷枪工具模型,如图4所示。通过根据实际作业环境的工件安装位置构建仿真环境,可以实现虚拟环境向实际喷涂作业环境的映射。
3.3. 热喷涂轨迹仿真
喷涂轨迹仿真主要分为三个部分 [4] [5] :工作站的建立、喷涂路径的建立和路径的同步,其流程表如图5所示。

Figure 3. The virtual environment for thermal spray path simulation
图3. 热喷涂仿真环境
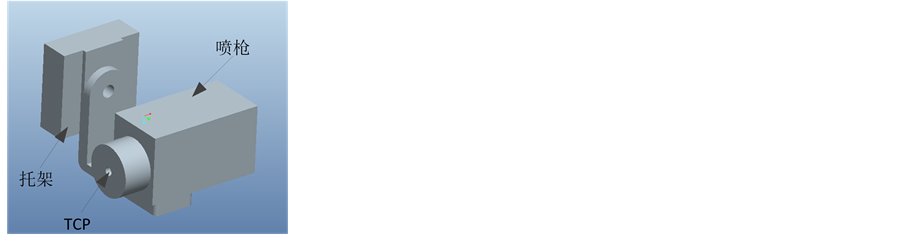
Figure 4. Spray torch model
图4. 喷枪模型
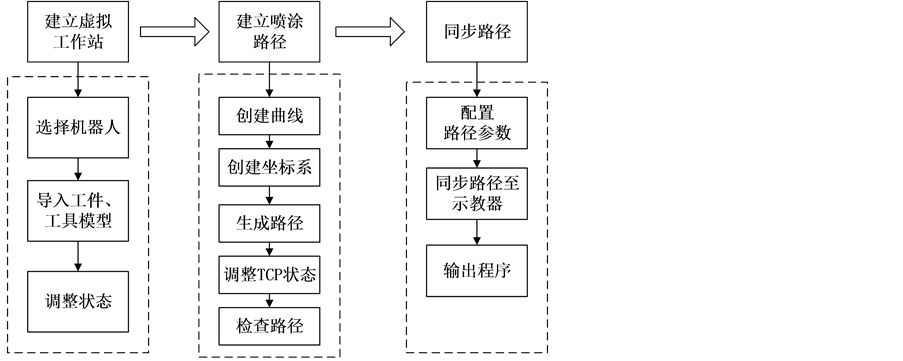
Figure 5. The flowchart for thermal spay path simulation
图5. 轨迹仿真流程图
1) 在Robotstudio软件中创建新工作站,为路径的建立做准备。
a) 选用对应型号的机器人,进入软件的操作界面,调整机器人初始六轴的位置,方便建立路径模型。
b) 将喷涂工具和工件三维模型形导入已创建的机器人工作站中。在Robotstudio中合理安装放置好各模型,工件与工具注意相互配合。以便在创建喷涂作业的曲线时能根据三维图形得到精度较高的空间曲线。
2) 根据工件模型,建立喷涂轨迹。
a) 创建曲线模块:在“建模”模块中点击表面边界,在工件上选取所需喷涂的表面,创建3D曲线模块。然后根据创建的模块与工件由CATIA带入的曲线生成运动轨迹。
b) 创建坐标系:轨迹运行过程中,为提高定位精度,通常需要创建用户坐标系以方便后期的编程与路劲修改。创建坐标系后,要注意改变工件坐标与工具坐标,这两者坐标选取的不同会影响后面实际轨迹的运行。
c) 生成路径:规划所需的路径,生成路径,若所规划路径较复杂,可将路径分为多段,逐段创建。
d) 调整TCP状态:通过自动配置生成的喷涂路径有些不是理想的喷涂状态,需通过检查目标方位,调整喷枪TCP状态,以使喷枪TCP点与工件表面的喷涂点点曲线尽量垂直,从而使这个喷涂过程喷涂量分布均匀。
e) 检查路径:机器人末端达到一点时,机器人各轴可能有多种不同的状态,所以要配置机器人各轴转过的角度。多次检查后,检查得到整个路径。
3) 配置完机器人目标点处各轴参数后,得到工件表面喷涂路径,在离线模块下同步到虚拟控制器(VC),选中工具坐标,工件坐标和路径程序都同步到虚拟控制器,控制器中会产生所构建的喷涂路径程序,同时在“监控”模块下可以得到机器人各轴在此路径运动过程中的运动变化规律 [4] 。
4. 应用实例分析
以某叶片为例,对其表面进行相应材料的热喷涂轨迹规划,以验证上述方法。叶片模型如下图6所示。
根据上述机器人热喷涂离线轨迹规划步骤进行仿真模拟,其运行轨迹如图7所示,TCP速度变化如图8所示,达到了预期的轨迹规划要求。

Figure 6. Blade model
图6. 叶片模型图

Figure 7. Trajectory simulation
图7. 喷涂轨迹模拟

Figure 8. Simulation result of TCP velocity
图8. TCP速度变化曲线
通过机器人离线编程,得到的喷涂路径上目标点的坐标和姿态数据(部分)如下:
MODULE Module1
CONST robtarget Target_10:=[[41.001531786,12.587809333,77.788447569],[0.126205012, 0.118867177,-0.676009998,-0.716207632],[-1,0,-1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
CONST robtarget Target_20:=[[30.144869714,12.955626752,77.938145789],[0.007635351, 0.008809588,0.70908034,0.705031321],[-1,0,-1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
。。。。。。
CONST robtarget Target_50:=[[6.666648987,38.262995869,77.941842772],[0.404118344, 0.40738509,0.581431742,0.576769349],[0,1,-1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
通过轨迹仿真得到的叶片喷涂路径程序(部分)如下所示:
PROC Path_10()
MoveL Target_10,v1000,z100,pqt\WObj:=WobjFixture_1;
MoveC Target_20,Target_30,v1000,z100,pqt\WObj:=WobjFixture_1;
MoveC Target_40,Target_50,v1000,z100,pqt\WObj:=WobjFixture_1;
。。。
ENDPROC
ENDMODULE
5. 结论
针对机器人热喷涂过程中存在的问题,为得到较为理想的工件表面喷涂轨迹,本文通过分析影响喷涂质量的参数,构建热喷涂机器人及喷涂可视化仿真的虚拟环境,提出了面向工件表面热喷涂的机器人空间轨迹规划的方法,基于热喷涂机器人离线编程,实现热喷涂机器人的轨迹规划,并通过某型叶片表面轨迹规划的实例分析,验证了方法的有效性、可行性。
基金项目
江苏省大学生实践创新训练计划项目(201511117081X)。
文章引用
杨秋宇,张燕军,张诗琪,许友权. 基于虚拟仿真的热喷涂轨迹规划方法
Thermal Spray Trajectory Planning Based on Virtual Simulation[J]. 机械工程与技术, 2016, 05(02): 95-101. http://dx.doi.org/10.12677/MET.2016.52012
参考文献 (References)