Mechanical Engineering and Technology
Vol.05 No.03(2016), Article ID:18648,11
pages
10.12677/MET.2016.53027
Structure Design of Sea Cucumber Catching Robot Based on TRIZ Theory
Haizhi Guo, Fusheng Yu, Yang Zhao, Jiadong Zhang
School of Mechanical and Electrical Engineering, Shandong Jianzhu University, Jinan Shandong

Received: Sep. 7th, 2016; accepted: Sep. 26th, 2016; published: Sep. 29th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
With the attention to physical and mental health, people’s demand of sea cucumbers is increasing. But now we have faced a difficult problem of artificial fishing. TRIZ (Theory of Inventive Problem Solving) is applied to explore how to catch the sea cucumbers in the paper. The problem is analyzed by the methods provided by TRIZ. The IFR is obtained by the problem definition. The resources of catching sea cucumbers are obtained by the resource analysis. The primary reason of the problem is obtained by the cause-consequence analysis. The solutions are put forward according to these primary reasons. The sea cucumber catching robot is also put forward. The inventive principles of sea cucumber catching robot are obtained by contradiction analysis and separation principle analysis. The optimization design of the robot is obtained according to inventive principles. Two types of sea cucumbers catching robot are obtained finally. One robot is driven by propeller, and another robot is based on fixed point. The design of sea cucumber catching robots has provided a theoretical basis for the real robot.
Keywords:Theory of Inventive Problem Solving, Sea Cucumber Catching Robot, Structure Design

基于TRIZ理论的海参捕捞机器人结构设计
国海芝,于复生,赵杨,张佳栋
山东建筑大学机电工程学院,山东 济南

收稿日期:2016年9月7日;录用日期:2016年9月26日;发布日期:2016年9月29日

摘 要
海参的需求量随着人们对身心健康的关注而增加,但面临着人工捕捞困难的问题,本文即应用发明问题与解决理论(TRIZ)来探索如何将海参捕捞上来的方法。应用TRIZ理论提供的方法分析问题,借助问题定义得出问题的最终理想解。应用资源分析得到海参捕捞所具有的资源,应用因果分析得出现有问题的根本原因,并根据根本原因提出解决方案,提出了海参捕捞机器人的研制。应用矛盾矩阵和分离原理得出海参捕捞机器人可利用的发明原理,由发明原理得出机器人的优化设计,最终得出两款海参捕捞机器人:基于螺旋桨驱动的海参捕捞机器人和基于落脚点固定的海参捕捞机器人。本文设计的海参捕捞机器人为实物机器人的制造提供了理论依据。
关键词 :发明问题与解决理论,海参捕捞机器人,结构设计

1. 引言
海参具有极高的营养价值,随着人们对身心健康的关注,对海参的需求量逐渐增加。海参养殖及加工在我国是一个重要的渔业产业,产值已超200亿元 [1] 。但海参捕捞工作却严重危害捕捞者的身体健康,越来越少的捕捞者参与海参捕捞工作。因此需要探索一种方便将海参捕捞上来的方法。
TRIZ方法来源于专利的分析,对于各个领域的工程问题都具有强大的创意启发和解决能力。TRIZ中的具体分析工具包括技术矛盾创新原理、物理矛盾分离原理、科学原理知识库和发明问题标准解法等 [2] [3] 。具体应用工具包括标准解和知识效应库、技术参数、发明原理、分离原理、矛盾矩阵等 [4] [5] 。TRIZ方法在其发展的过程中已演变成一套成熟的九大经典理论体系,包括:TRIZ技术系统八大进化法则、最终理想解、40个发明原理、39个工程参数及阿奇舒勒矛盾矩阵、物理矛盾和四大分离原理、物—场模型分析、发明问题的标准解法、发明问题解决算法以及科学效应和现象知识库。上述九大理论体系均可作为解决问题的方法,此外,TRIZ理论还和多种创新方法相互结合,建立了产品设计的集成创新模型,使产品设计过程规律化、系统化与模块化具有重要的现实意义和理论研究价值 [6] - [8] 。
本文应用TRIZ理论对海参捕捞问题进行了分析,通过应用TRIZ中的各分析工具得出了解决问题的方案。对各个方案进行了对比分析,得出海参捕捞机器人这一最终解决方案。设计的海参捕捞机器人能够很好的解决海参捕捞问题,为实物设计提供了理论依据。
2. 基于TRIZ理论的海参捕捞问题分析
2.1. 问题定义
在前言部分描述了人工捕捞海参较为困难,面临着各种问题。应用TRIZ理论分析希望能够找到方便获取海参的方法,那么可将本问题定义为:如何方便的捕捞海参。
2.2. 最终理想解
由理想度程度的不同将本问题的最终理想解定义为:
1) 用笼子来捕捞海参。
2) 用一个面积比较大的网来养殖海参,当海参成熟后将网提起就可以捡取海参。
3) 设计一种带有机器视觉对海参自动识别并拾取的装置。
4) 设计一种主从控制型海参捕捞设备,由人来辅助完成功能。
2.3. 资源分析
借助于资源分析找到问题的解决方案,以如何将海参捕捞上岸为研究对象,分析其各类资源以便找到相应的解决方案。资源分析如表1所示。
上述资源分析中所列举的海参捕捞中可利用的资源很多,可利用上述资源得出解决问题的方案。
2.4. 因果分析
对于最终理想解1,用笼子来捕捞海参。当海参成熟后,将笼子放置到海底,在笼子的一侧留有开口,让海参钻到笼子里。考虑海参不可能自己主动的钻进去,可以在笼子内放置诱饵。调查下海参喜欢吃的食物或喜欢闻的气味,将海参喜欢吃的食物或喜欢闻的气味放在笼子内,引诱海参到笼子内去。总结上述描述,可得方案1:在笼子里放入诱饵,引诱海参到笼子内部。
上述资源分析和最终理想解中,可以用海参网来养殖海参,将海参苗洒在海参网上,让海参在网内成长,当海参成熟后直接将网提起即可。但用网来养殖海参还面临着较多的问题,需要对用网来养殖海参进行因果分析。网养的最终问题就是实用性差,用因果分析链层层分析来找到问题最根本的原因,从根本原因出发找到问题的解决方案。因果链如图1所示。
从上述因果链中能够看出,海参网养实用性差的原因有:网的寿命有限,网内养殖的海参的数量有限以及网的结构不符合海参生长的环境。由此可以得出以下方案:
方案2:研制一种复合材料的海参养殖网,增加海参养殖网的寿命,降低海参网养殖的成本。
方案3:研制一种足够大且结构适合海底复杂地形的网。
对于方案3,利用网养殖海参,面临的问题除了成本高、养殖数量有限之外,网的结构也需适合海参生长的复杂环境。当将海参苗撒入网内时,希望网孔很小,海参苗不会从网内漏出。随着海参逐渐的长大,网孔需要足够的大使海参的食物能够从网孔内塞入。由于海参的生长习性,网的底部要紧靠海底。海底无规律的分布着礁石、珊瑚等,要使网紧贴海底,网的底部需要足够软。为了给海参提供运动空间,网的上部空间又需要大。因此,将此种结构的网设计出来,就可以实现海参的网养殖形式。但由社会发展的现状来看,这种网暂时还不能实现。
在资源分析中列举可以利用吸筒实现海参的吸取,但作用效果并不理想。吸筒除了将海参吸取上来之外,还会将杂草等杂物吸取上来,导致堵塞吸管。下面对利用吸筒吸取海参进行因果分析,来寻找解决问题的方案。因果分析图如图2所示。
从以上吸筒吸取海参因果分析链中可得,吸筒吸取海参作用不理想的原因有三个:吸筒界面大导致吸取海参所需的动力大;由于吸筒口无过滤装置而导致除了吸取海参外,还吸取杂草等各种杂质;由于海底地形复杂、珊瑚的遮挡导致吸筒移动不便。因此,可以得出下述方案:
方案4:将吸筒的截面积减小,并在吸筒的入口处安装过滤装置。将原来的大范围的吸取海参改变为单个的吸取,减少了能量的消耗,且安装过滤装置避免了吸取过多的杂质。
上述资源分析中,包含人工捕捞海参,由于人身体的承受能力要受环境的影响,面临的问题很多。人工捕捞海参的最终问题就是捕捞困难,现用因果链分析,如图3所示。
上述因果分析图中人身体承受能力有限,人身体对温度、氧气和压强的要求较高。人工下海捕捞海参时,都要背上氧气瓶,穿上潜水服。但潜水服并没有加热或是保温功能,海参要夏眠,只能在春秋季

Table 1. Source analysis of technology system
表1. 技术系统的资源分析

Figure 1. Causal analysis of sea cucumbers breeding in net
图1. 海参网养因果分析

Figure 2. Causal analysis of absorbing sea cucumbers by suction tube
图2. 吸筒吸取海参因果分析
进行捕捞。春秋季海参温度低,尤其是深海处的温度,低温的海水严重威胁着捕捞人员的身体健康,由此可以提出解决方案。
方案5:设计一种能够自动调整温度的潜水服,它能够保持潜水服内恒定的温度,不管外界的水温如何变化。

Figure 3. Causal analysis of catching sea cucumbers by person
图3. 人工捕捞海参的因果分析
上述因果分析中描述,海参捕捞困难的另外一个原因是海参不易识别。人们下海进行捕捞海参时,很大一部分时间是花在寻找海参上。海参本身不易识别,如果在技术系统中加入新的物质,此物质可以帮助我们很好的识别海参,则捕捞者便可以轻松的识别并拾取海参。原技术系统和改进之后的技术系统的SAFC模型如图4所示。
方案6:加入新物质,利用热定位技术,寻找海参特有的性质,捕捞人员只需配备相应的设备,就可以清楚的知道海参所在的位置,大大减少了寻找海参所需的时间。
根据人工潜水困难导致海参捕捞困难这一问题,我们可以根据技术系统进化法则来推测海参捕捞的发展趋势,查阅TRIZ中八大进化法则发现,减少人工介入的进化法则8对本问题有明显的提示作用,由减少人工介入的一般途径可以提出下述解决方案:
方案7:研制一种主从控制型海参捕捞机器人,替代人工在水下拾取海参工作,但仍然保留着人的动作,通过人工来识别海参并操控机器人的运动,在人的辅助作用下实现海参的拾取。
方案8:研制一种基于机器视觉的海参捕捞机器人,用机器动作完全代替人工,不需要人的参与,机器人能够自动的识别海参并进行抓取。
由于现在还处于设计阶段,定量的数据较少,对于上述几个方案还只能是定性的评价。待所有方案付诸于实施之后才可进行的定量的评价。
2.5. 矛盾分析
方案8在方案7的基础上实现了海参的自动拾取,但方案8所设计的机器人在控制算法上较方案7复杂的多,将矛盾双方转化为TRIZ语言,即将上述矛盾转化为39个工程参数。实现海参的自动拾取转化为提高自动化程度,将机器人的控制算法比较复杂转化为可靠性和增加系统的复杂性。在矛盾矩阵中找到改善的特征自动化程度对应的编号为38,在恶化的特征中找到复杂性和可靠性对应的编号为36和27。矛盾双方组成冲突矩阵,如表2所示。
该矩阵表达了TRIZ提示的发明原理,通过对应的发明原理,结合问题的实际情况,拟采用编号24所对应的发明原理,利用其中的一个创新思维方向:使用中介物传递或完成所需动作,得到创新方案。寻找海参所具有的不同于其他的海洋生物的特性,并将这种特性算法输入到海参机器人的控制算法中,单独的判断海参所有特性中的一种特性就可以识别出海参,此算法相对于机器视觉匹配海参的算法简单很多,且不需要人的参与,提高了自动化。
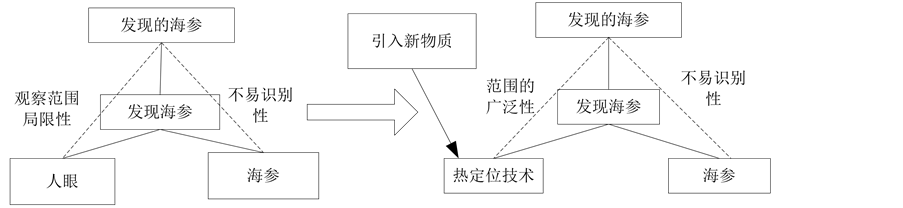
Figure 4. SAFC model of catching sea cucumbers by person
图4. 人工捕捞海参的SAFC模型
Table 2. Contradiction conflict matrix
表2. 矛盾冲突矩阵
机器人要捕捞到海参,需要下潜到一定的深度,那么机器人为了克服水的浮力需要具有一定的重量,但是机器人的重量太重,随着海参拾取量的增加,机器人的重量呈上升趋势。当机器人在水下运动时会消耗大量的能量,并且运动的速度减慢。为了使机器人能够在水里容纳数量更多的海参,减少机器人浮上水面和沉下水底的次数、节约时间,机器人需要具有足够大的体积来容纳海参,但是增大机器人的体积,同样会消耗大量的能量,运动速度也会减慢。
在此,各特征出现了矛盾,将上述矛盾转化为39个工程参数。改善的特征为1运动物体的重量和7运动物体的体积,恶化的特征为22能量损失和9速度。矛盾双方组成的冲突矩阵如表3所示。
从上述矛盾矩阵中提示的发明原理,结合实际情况,拟采用编号为6,7,8,15的发明原理,根据冲突矩阵所提供的创新思维方向,对机器人进行改造。
由上述配重原理8和动态化原理15可得,为了使机器人既具有重量沉入水底,又能够使其在水面上运动时不消耗太多的能量,可得方案给机器人加上配重,且配重能够实时的调节机器人的重量和所受浮力的大小。在此,可在机器人的外侧安装上气囊,配备有相应的供气装置,再在机器人上安装传感器,实时的测量机器人的重量和机器人所受的浮力,实时调节二者的平衡。
由上述嵌套性原理7可得,为了使机器人的体积减小,可使机器人的某些部件设置成中空的,使其他的部件安装在其内部,综上所述可得方案将机器人的某些部件设置为中空的。例如在机器人上安装气囊,但如果机器人下潜的深度较深,所受的压强较大,可能无法给气囊充气,因此,可以在机器人内部安装调节气缸,为了节省空间,将调节气缸设置成嵌套式的,其结构图如图5所示。
由上述普遍性原理6可得,为了缩小机器人的体积,可使机器人的某些零部件具有多个功能,例如,上述为了调节机器人的重力而安装的气囊,在调节重力时气囊里面充有气体,能起到保护机器人的作用,避免机器人本体与质地较硬的焦岩碰撞,即气囊在此有两个作用。
海参的生活深度为1.5 m~15 m,机器人要捕捞海参需要下潜的深度不低于此深度。由常识可知,深度越深,海水的压强越大,对于机器人的要求就越高,机器人的零部件或外壳需要具有足够的厚度,但所用部件的厚度越大,机器人的质量就越大,在水下的运动速度越低,运动所需消耗的能量越高。在此,具有技术矛盾,将其转化为39个通用工程参数,零部件厚度的增加,改善的特征为:14强度、30物体外部有害因素作用的敏感性和35适应性及多用性,恶化的特征为:1运动物体的重量、9速度、22能量损失。查阅矛盾矩阵如表4所示。
Table 3. Contradiction conflict matrix
表3. 矛盾冲突矩阵
Table 4. Contradiction conflict matrix
表4. 矛盾冲突矩阵
 1.气缸安装底座2.嵌套式活塞杆3.弹簧4.活塞5.缸体6.气嘴
1.气缸安装底座2.嵌套式活塞杆3.弹簧4.活塞5.缸体6.气嘴
Figure 5. Structure of nested regulating cylinder
图5. 嵌套式调节气缸结构图
从上述矛盾表中根据矛盾矩阵所提示的发明原理,结合实际情况,拟采用编号为40的发明原理,即复合材料发明原理。为了既满足机器人所能承受的压强大,又不增加机器人的重量,提高机器人的运动速度,减少能量的消耗,可以采用复合材料来制造各零件,增加机器人的强度。
即方案采用复合材料制造机器人的各零部件。
上述矛盾表中提供编号为1的分割原理,为了增加机器人的强度,构件的厚度需要增强,但为了减小机器人的重量,拟采用分割原理,对机器人的某个或某些部件进行分割。对于海参捕捞机器人来说,将海参抓取之后需要采用相关的装置将海参传送到储存装置中。此传送装置可以采用传送带,可应用分割原理将传送带进行分割,降低海参的重量。在传送带上设置有遮拦,海参落入到传送带上之后,在遮拦的作用下将海参运送到海参存储装置中。即将捕捞机器人的某些部件采用分割原理设计。
2.6. 分离原理
在上面矛盾分析中,为了将机器人下潜到水下,需要改善的物理量为运动物体的重量,而机器人在水下运动时,机器人的重量又是一个恶化的参数。因此,既需要机器人的重量重,又需要机器人的重量轻,此处即为一对物理矛盾,根据物理矛盾的解决方法,采用空间分离的方法,可得方案机器人下潜时,在机器人上放置一种质量较大又便于分离的结构,当机器人下潜到水下寻找海参时,将所放置的结构与机器人本体分离。
当机器人下潜时需要机器人所受的浮力足够小,但当机器人在水里寻找海参时,又需要机器人所受的浮力足够大,能够平衡机器人所受的重力,为一个工程参数具有相反的需求,即构成了物理矛盾。根据物理矛盾的解决方案,再结合本案例的实际情况,选用时间分离的方法来解决。因此,需要机器人上的浮力调节装置气囊、调节气缸能够在不同的时间作用,当机器人下水时,气囊和调节气缸不起作用、内部没有充气体,当在水下时根据机器人所受的重力,实时的调整浮力的大小。
任何机器的运动都必须有专门的控制系统,机器人为了能够容纳足够多的海参,要求储存海参的储存装置足够大,但是为了满足机器人的速度需求,要求机器人总的体积尽量小,所以需要控制系统所占的体积足够小甚至没有。因此,在此处为既需要有控制系统来控制机器人的运动,又不需要有控制系统以减小机器人的体积,此处为一对物理矛盾,结合案例的实际情况,采用整体与部分分离的方法来解决此问题。为此,可将控制系统与机器人本体分开,利用拖缆来实现控制的传递。将控制系统放在水面的船上,通过拖缆来实现动作的传递。
机器人捕捞到海参之后需要有相应的存储装置,若是在机器人上安装存储装置,所占的空间较大、机器人的重量增大,阻碍机器人速度的提升;同时若将机器人的存储装置安装在机器人的内部,那么当存储装置装满海参时,需要将机器人浮上水面,将海参倒出,影响机器人捕捞海参,使得效率降低。则问题描述为既需要机器人有海参存储装置,又不需要有存储装置以满足速度的要求,此处又为一处物理矛盾,采用整体与部分分离的方法来解决此问题。为此,可将海参存储装置与机器人本体分开,利用相应的传送装置来实现海参的传递。将存储机器人的结构放置在水面的船上,当机器人捕捞到海参之后直接通过传送装置,将海参传送到船上的存储装置中,解决了机器人速度受限的问题,以及捕捞效率低的问题。
在上述矛盾分析中谈到,将海参抓取之后采用传送带传送海参。抓取海参之后手爪缩回,控制传送带位于手爪下方。在传送带遮拦的作用下将海参传送到海参存储中。但是当手爪需要抓取海参时,手爪伸出,传送带位于手爪的下部会阻碍手爪拾取海参,此时传送带又不能位于手爪的下方,构成了物理矛盾。应用空间分离和时间分离原理,可以将传送带设置成传送带栅栏和空隙相间的结构。当手爪抓取海参时,传送带空隙部分位于手爪的下方,为手爪拾取海参提供充足的空间;当需要传送拾取的海参时,传送带栅栏部分位于手爪的下方,完成传送任务。所设计的传送带结构如图6所示。
即应用空间分离和时间分离方法将传送带设计成栅栏和空隙相间的结构。
3. 最终方案设计
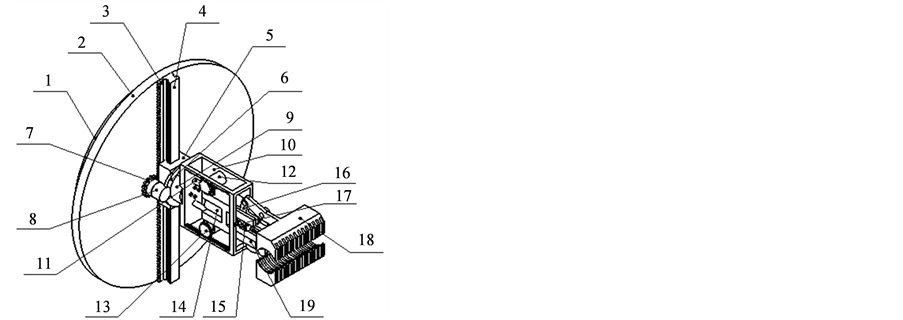
由上述分析通过比较得海参捕捞机器人的最终方案1,基于螺旋桨驱动的海参捕捞机器人,其结构设计如图7所示。
上述机器人结构,手爪运动机构较为复杂,通过手爪运动机构来实现海参的拾取,其结构示意图如图8所示。
当该机器人工作时,移走机器人下端口,打开上盖,移开袋扣,将带有孔洞的海参袋放置在海参筐中,安装上袋扣,盖上上盖。将机器人放入水中,在螺旋桨的推动下,实现机器人在水中的运动,同时通过机外CCD寻找有海参的地方。当发现海参时,驱动机器人下沉到海参的上面,控制传送带空隙运动到手爪运动机构的下方,手爪运动机构将海参拾取,控制传送带的栅栏部分运动到手爪的下方,手爪张开,海参滑落到栅栏上,在传送带遮栏的作用下将海参带走,当海参传送到海参袋上方时,在重力的作用下,海参落入海参袋中,捕捞结束时,驱动传送带上的栅栏部分位于手爪的下方,保护手爪。当机器人浮上水面时,操作人员打开上盖,移开袋扣,将海参袋连同里面的海参一起取出,完成了一个捕捞循环。
最终方案2,基于落脚点固定的海参捕捞机器人,其结构如图9所示。
方案2与上述方案1的内部结构是一样的,不同点在于机器人的运动方式不同,方案2机器人的运动由腿部各关节的运动来实现,当捕捞海参时,机器人的腿部伸开固定在海底;当机器人上潜或是下潜时,机器人的腿部缩回到机器人本体上,方便机器人的移动。
 1. 链条2.隔离栅3.遮栏4.传送带空隙
1. 链条2.隔离栅3.遮栏4.传送带空隙
Figure 6. Structure of conveyor belt
图6. 传送带的结构设计图

 1.拖缆2.上盖3.气囊4.壳体5.螺旋桨旋转电机6.螺旋桨推进器7.下端口8.内部总成9.机外CCD10.手爪运动机构11.底盘12.调节气缸13.海参筐14.链轮支架15.链轮16.传送带17.袋扣18.海参袋19.链轮电机
1.拖缆2.上盖3.气囊4.壳体5.螺旋桨旋转电机6.螺旋桨推进器7.下端口8.内部总成9.机外CCD10.手爪运动机构11.底盘12.调节气缸13.海参筐14.链轮支架15.链轮16.传送带17.袋扣18.海参袋19.链轮电机
Figure 7. Whole structure of the robot
图7. 机器人的总体结构图
 1.盘状旋转电机2.手爪旋转盘3.横向移动齿条4.导轨5.滑块6.滑块上板7.横向齿轮8.横向移动电机 9.手爪旋转电机 10.手爪支架11.导杆12.手爪伸缩电机13.手爪伸缩齿轮14.手爪开合电机15.手爪开合螺母16.手指联杆17.手爪CCD18.手指19.手爪底座
1.盘状旋转电机2.手爪旋转盘3.横向移动齿条4.导轨5.滑块6.滑块上板7.横向齿轮8.横向移动电机 9.手爪旋转电机 10.手爪支架11.导杆12.手爪伸缩电机13.手爪伸缩齿轮14.手爪开合电机15.手爪开合螺母16.手指联杆17.手爪CCD18.手指19.手爪底座
Figure 8. Structure of the gripper
图8. 手爪结构图

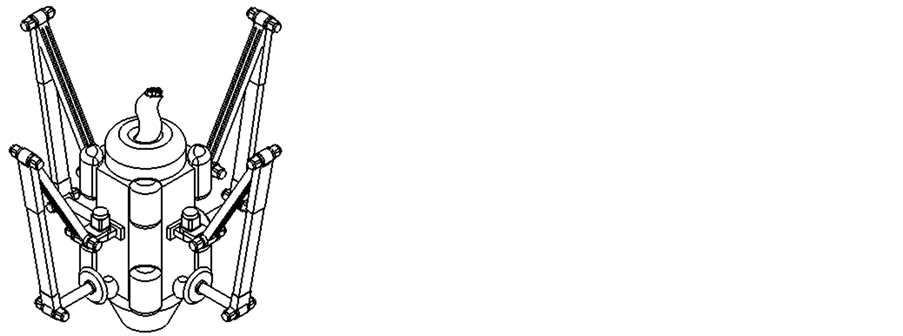 1.拖缆2.上盖3.气囊4.壳体5.连接板6.腿部7.下端口8.内部总成9.机外CCD
1.拖缆2.上盖3.气囊4.壳体5.连接板6.腿部7.下端口8.内部总成9.机外CCD
Figure 9. Whole structure of the robot
图9. 机器人的总体结构图
4. 结论
1) 借助于问题定义得出问题的最终理想解,由理想度程度的不同将最终理想解分成了四个层次。
2) 应用TRIZ理论中的资源分析,列举了海参捕捞所具有的资源;通过因果链分析分析现有的海参捕捞方式所具有的弊端,由最终问题得出根本原因,并针对根本原因提出问题的解决方案。提出了海参捕捞机器人的研制。
3) 针对特定的解决方案:海参捕捞机器人,由矛盾矩阵和分离方法得出相应的发明原理,应用发明原理对海参捕捞机器人进行了优化设计,得出海参捕捞机器人最终的设计方案:基于螺旋桨驱动的海参捕捞机器人和基于落脚点固定的海参捕捞机器人。
4) 所设计的海参捕捞机器人并非最优方案,在海参识别问题上需要人工参与,因此还需继续优化。机器视觉技术已发展的非常成熟,下一步将继续研究应用机器视觉技术来取代人工对于海参的识别。
基金项目
山东省高等学校科研计划项目(J14LB05)。
山东建筑大学博士科研基金项目(XNBS1014)。
文章引用
国海芝,于复生,赵杨,张佳栋. 基于TRIZ理论的海参捕捞机器人结构设计
Structure Design of Sea Cucumber Catching Robot Based on TRIZ Theory[J]. 机械工程与技术, 2016, 05(03): 227-237. http://dx.doi.org/10.12677/MET.2016.53027
参考文献 (References)
- 1. 徐永东, 李可闻. 我国海参产业现状分析[J]. 渔业信息与战略, 2013, 28(2): 117-122.
- 2. 郑称德. TRIZ理论及其设计模型[J]. 管理工程学报, 2003, 17(1): 84-87.
- 3. 杨清亮. 发明是这样诞生的: TRIZ理论全接触[M]. 北京: 机械工业出版社, 2006.
- 4. 檀润华. 发明问题解决理论[M]. 北京: 科学出版社, 2004.
- 5. 赵敏, 张武城, 王冠殊. TRIZ进阶及实战: 大道至简的发明方法[M]. 北京: 机械工业出版社, 2015.
- 6. 钱炜苗. 基于功能分析、约束理论和TRIZ创新设计理论的产品改进设计研究[D]. 杭州: 浙江大学, 2011.
- 7. 李阳. 基于CBR, TOC和TRIZ的绿色设计模型研究[D]. 杭州: 浙江大学, 2012.
- 8. 张建军, 张利, 徐娟, 等. 集成TOC/TRIZ/Fuzzy的产品概念设计方法的研究[J]. 机械科学与技术, 2011, 30(7): 1154-1158.