Modeling and Simulation
Vol.05 No.02(2016), Article ID:17724,10
pages
10.12677/MOS.2016.52006
Risk Warning for Ship Pilotage Based on Bayesian Networks
Shubo Zhang1, Qiangrong Tang2
1Department of Computer Science, Guangzhou Marine Institute, Guangzhou Guangdong
2Department of Shipping, Guangzhou Marine Institute, Guangzhou Guangdong

Received: May 6th, 2016; accepted: May 27th, 2016; published: May 30th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Ship pilotage is an important process of marine traffic transportation, as it is critical to in-and-out port ships, port operations, environmental protection and the image of national port. The pilotage is a complicated process, which is involved with human, vessel and environment. Investigating the elements that influence the safety of ship pilotage, and the relationship among these elements will help to take appropriate measures for safety pilotage. In this study, we developed a Bayesian network for pilotage risk warning based on literature investigation and deep interview with experts. The structure and parameters of the network were determined from expert knowledge. The validation experiments were conducted on SamIam and a dozen of real pilotage cases were used to test our network. The experimental results show that the proposed network can correctly predict the risk in case of dangers and is promising for practical application.
Keywords:Ship Pilotage, Pilotage Risk, Risk Warning, Bayesian Network

基于贝叶斯网络的船舶引航风险预警
张树波1,唐强荣2
1广州航海学院计算机系,广东 广州
2广州航海学院海运系,广东 广州

收稿日期:2016年5月6日;录用日期:2016年5月27日;发布日期:2016年5月30日

摘 要
船舶引航是水上交通运输的重要环节,它对于船舶安全进表出港、港口正常作业、环境保护和提升国家港口形象等方面具有重要意义。船舶引航是一个复杂的过程,它与人、船舶和环境等各种因素密切相关,研究各种因素对引航安全的影响以及这些因素之间的相互关系,动态识别船舶引航风险,有利于及时采取措施,确保船舶安全进出港。本文提出一种用于船舶引航风险预警的贝叶斯网络模型,通过文献调研和对专家进行深度访谈,利用专家知识和文献资料的信息确定网络的拓扑结构和相关参数。用SamIam软件建模并对一些船舶引航案例进行分析,结果表明本文的贝叶斯网络能够对船舶引航过程的相关风险做出正确的预警,具有实际应用的价值。
关键词 :船舶引航,引航风险,风险预警,贝叶斯网络

1. 引言
国际贸易的快速发展给世界航运业带来了良好的机遇,同时也给水上交通运输带来了新的挑战。由于水上交通运输活动日益繁忙,港口生产、通航环境不断发生变化,通航条件日趋复杂,船舶进出港的安全生产面临着越来越大的压力。引航事故的发生将导致严重的生命、财产损失,同时也给正常通航和海洋环境保护带来潜在的威胁。因此,深入分析船舶引航过程的各种风险因素,有效地对这些风险因素进行管理和控制,降低引航风险,提高船舶航行安全,对于保障港口安全生产,提升港口服务水平和综合竞争力,保护海洋环境,提升国家港口形象具有重要意义。
影响船舶引航安全的因素是复杂多变的,既包括引航员、船员和船舶本身的因素,也有潮流、环境和气象等因素。如何识别和评价船舶引航过程中的风险因素并采取合适的控制措施,确保船舶安全进出港,一直以来是海事领域关注的焦点。国内外学者基于船舶引航事故的历史数据,提出了各种用于分析、预测船舶引航风险的方法。方泉根 [1] [2] 采用规范化安全评估(FSA)方法对海上船舶引航风险做了全面的分析与评估。马飞 [3] 比较了资产脆弱性的风险评估模型和事故树分析方法,认为前者在小样本的情况下更加有优势。周丽丽 [4] 采用灰色综合评价模型对引航风险进行分析,确定了影响引航安全的四种最主要原因。这些基于历史数据的引航风险分析方法存在一定的极限性。这是由于在研究事故发生的可能性时应该考虑不发生事故的引航数据,然而在实际工作中,人们一般没有收集正常通航的数据;另外,由于水上交通环境不断发生变化,比如船舶逐渐大型化、高速化、自动化,高性能助航设备的不断出现,航道条件也会发生变化,这些因素使得历史数据在分析引航安全方面受到某些限制。
贝叶斯网络是一种不确定知识表达和推理领域最有效的理论模型,在处理不确定信息方面具有明显的优势。近年来,随着贝叶斯方法在很多领域得到成功应用 [5] [6] ,海事领域的研究人员逐渐将贝叶斯网络应用到船舶航行安全方面来 [7] - [10] 。Khakzad等人 [11] [12] 将贝叶斯网络用于评估特定海上情境下事故发生概率的预测。Eleye-Datubo [8] 用贝叶斯网络对事故风险情境下船舶特定排放物进行检测。Trucco [10] 通过将人和组织的因素综合到贝叶斯网络中来分析船舶的风险。Antão [13] [14] 基于葡萄牙海事局的数据库建立贝叶斯网络来分析海面状况对事故发生的影响。Eleye-Datubo [15] 用贝叶斯网络分析油轮之间的转油的可能性。刘克中 [16] 用贝叶斯网络预测船舶的溢油风险。Zhang [17] 根据专家知识和历史事故数据建立天津港的风险预测模型。在船舶航行风险预警方面,胡中凯 [18] 用贝叶斯网络预测船舶搁浅的概率。Hu等人 [19] 基于贝叶斯方法估计船舶发生事故的可能性,胡甚平 [20] 采用贝叶斯推理方法分析船舶航行风险。汤旭红等人 [21] 运用贝叶斯网络研究船舶碰撞风险。Kevin [7] 基于贝叶斯网络和logistic回归技术建立船舶风险分析系统。Hänninen [22] 根据专家的判断建立贝叶斯网络来研究船舶碰撞和搁浅的风险。
基于已有的研究成果,本文考虑采用贝叶斯网络研究船舶引航的风险预警问题。我们通过专家访谈和文献调研的方式详细研究船舶引航过程中的各种风险因素;基于这些因素之间的相互关系建立船舶引航风险预警的贝叶斯网络模型;最后将这个模型用于对部分历史数据进行测试。实验结果表明,本文提出的贝叶斯网络模型能够正确预测船舶航行的风险,适合于实际的船舶引航风险预警。
2. 贝叶斯网络模型
贝叶斯网络也称贝叶斯信念网,或者因果网络,最初由Pearl提出并应用于专家系统 [23] ,它是一种用来描述随机变量之间概率依赖关系的概率图模型 [24] 。从结构上看,贝叶斯网络是一种有向无环图,包含网络拓扑结构和条件概率两部分。其中网络拓扑结构包含网络节点和连接节点的边,节点用来表示研究的随机变量,而连接节点的边则表示随机变量之间的依赖关系或者因果关系。如果两个随机变量之间存在概率依赖关系,那么他们所代表的节点之间用一条有向边连接起来 [25] ;条件概率表用来度量随机变量之间的相互依赖关系的强度。
假设 表示贝叶斯网络中节点所代表随机变量的集合,那么这些随机变量的联合分布可以用如下的链式法则表示 [26] ,
表示贝叶斯网络中节点所代表随机变量的集合,那么这些随机变量的联合分布可以用如下的链式法则表示 [26] ,

其中 是满足局部马尔柯夫性质的条件概率分布,
是满足局部马尔柯夫性质的条件概率分布, 表示
表示 的父节点组成的集合。贝叶斯网络的优点在于可以根据网络结构和已知的信息对未知的信息进行推断,这种推断的依据是贝叶斯定理,即结合先验概率和条件概率来计算随机事件的后验概率,这个后验概率的值是通过如下贝叶斯公式来计算的,
的父节点组成的集合。贝叶斯网络的优点在于可以根据网络结构和已知的信息对未知的信息进行推断,这种推断的依据是贝叶斯定理,即结合先验概率和条件概率来计算随机事件的后验概率,这个后验概率的值是通过如下贝叶斯公式来计算的,

其中,后验概率 表示在事件
表示在事件 发生的条件下事件
发生的条件下事件 发生的概率,
发生的概率, 表示事件
表示事件 的先验概率。
的先验概率。
一般情况下,为某个特定的研究问题建立相应的贝叶斯网络需要解决三个基本问题,即变量选择、结构选择和概率选择。变量选择就是确定与研究问题有关的变量,以及这些变量的取值范围;结构选择是确定网络中节点之间的关系,即哪些变量之间存在相互依赖关系,哪些变量之间没有关系,并在有依赖关系的节点之间确定有向边的方向;概率选择问题是根据相关信息确定节点所代表的随机变量之间相互依赖关系的强度,即是贝叶斯模型中节点条件概率的确定。
3. 船舶引航风险预警的贝叶斯网络模型
3.1. 贝叶斯网络结构的确定
为了建立船舶引航风险预警的贝叶斯网络模型,首先需要确定船舶引航过程中影响船舶安全的因素。船舶引航是一个复杂的过程,其中涉及到人、船舶、环境等各种因素,本文通过文献研究和专家访谈,考虑从人对船舶的操纵能力、船舶可操纵性和船舶航速三个大的方面来分析船舶引航安全问题。其中船舶操纵能力主要涉及到一些跟人有关的因素,包括工作能力、责任心、疲劳程度、沟通的有效性和航行信息的掌握程度等;船舶可操作性主要包括船舶自身因素和船舶航行环境的因素,而船舶自身因素有主机、舵机、船舶吨位和装载的货物类型,环境因素包括自然环境和航道环境。自然环境因素包括能见度、风况、潮汐等因素;航道条件包括船舶所在的水域、它船的影响以及航道的交通流状况。图1是我们根据文献调研和专家知识建立的贝叶斯网络,该网络显示了影响船舶引航安全的各种因素,以及它们之间的相互影响关系。这个贝叶斯网络共有32个节点:A1:管理水平;B1:船员责任心;B2:船员年龄、B3:引航经历;B4:培训情况;B5:疲劳作业;B6:细心程度;B7:注意力;B8:沟通能力;B9:瞭望情况;B10:船员技能;C1:引航时间;C2:能见度;C3:风力、风向;C4:潮流、潮汐;D1:水域状况;D2:它船影响;D3:交通流状况;E1:船员助航设备;F1:船舶;F2:主机状况;F3:舵机状况;F4:船舶吨位大小;F5:装载货物;G1:自然环境;G2:航道条件;G3:信息;H1:环境状况;I1:操纵能力;I2:船舶可操作性;I3:航速;J1:安全。
确定了网络中的随机变量之间的依赖关系之后,接下来需要估计网络的相关参数,首先需要确定各节点所代表随机变量的可能取值。为简单起见,本文用规定网络中各节点所代表随机变量取离散值,即每个随机变量只能取有限多个状态值,而且大多数变量只取“0”或“1”两个值来表示随机变量的两种状态。例如引航管理这个变量可以取“1”或“0”,“1”表示“有效管理”,当引航管理当局能够建立完善的引航管理制度,合理分配任务,也定期对引航员进行业务培训、心理调节,保证引航员以正常的精神状态去实施引航任务,就认为是“有效管理”,反之认为“一般”。对于人员疲劳状态,该变量也可取两个值“0”(疲劳)或“1”(“不疲劳”),“疲劳”表示当存在或将要发生险情时,引航员不能够通过比较充分的瞭望,对当前态势保持可控状态,并且能够采取相应的避让措施;反之,如果能够采取适当措施,使船舶保持可控状态,即认为“不疲劳”。表1列出了所有节点的可能取值,以及每个取值的语义。
3.2. 贝叶斯网络参数的估计
网络参数估计是贝叶斯网络研究的重要内容,主要包括各节点先验概率和局部条件概率估计。尤其是条件概率表,随着网络节点的增加,需要估计的参数数量迅速增加,相应的计算量和计算的复杂程度也将明显上升。贝叶斯网络参数估计一般有两种途径,一是采用机器学习的方法,利用已有数据来学习各变量的先验概率和局部条件概率表;二是利用行业专家的知识来确定相关参数。在船舶引航领域,由于引航发生事故的概率非常小,数据积累比较少,很多实际上数据没法得到,要收集到符合本研究所需的数据难度较大,因此我们采用第二种方法来确定网络中的相关参数,即结合文献研究和行业专家的知识来确定先验概率和条件概率表。通过对多位引航管理人员、引航人员和船员的深度访谈,结合对相关文献资料的分析,给出了网络中各根节点的先验概率如表2所示。
由于贝叶斯网络中节点之间的关系满足局部马尔柯夫性质,即在知道了某个节点的父节点之后,该节点与其他的祖先节点没关系。因此节点之间的依赖问题就可以通过研究节点的局部条件概率来实现。根据专家的知识和文献资料,我们在分析网络中节点之间关系时发现如下一些关系:
1) 有效的引航管理能够减少引航员疲劳作业,提高他们工作时的注意力;也能够强化引航员的责任心,使得他们在引航过程能够细心操作、充分进行瞭望;同时也能够对引航员进行有效、全面的业务培训,提高引航员的业务能力和沟通能力。
2) 年轻的引航员工作经验不丰富、操作技能不是非常熟练,这些缺点往往使得他们操作更加细心;中年的引航员工作经验不断丰富、操作技能不断熟练,细心程度有所降低;年纪大一些的引航员工作经验丰富、技能熟练,同时他们操作倾向于细心、保守。
3) 疲劳作业和在夜间引航时,引航员的注意力往往没有白天集中,操纵能力也没有白天强。
4) 充分瞭望、助航设备的使用,以及良好能见度情况下,有利于及时了解船舶航行的状况信息,这是有利于及时采取正确的控制措施。
5) 良好的能见度、风况、潮流、潮汐是引航作业的有利条件。
6) 良好的航道交通流状况、引航水域的特性有利于引航作业。
7) 附近船舶的航行状态会对本船的作业产生不同程度的影响。
8) 船舶自身的状况,如吨位、主机和舵机的工作状态影响着船舶的引航作业。
9) 船舶装载货物类型的不同会导致船舶可操纵性的差异。
10) 船舶航速太高或者太低都不利于船舶在紧急情况下的操纵。
根据这些关系,我们综合专家的意见确定了贝叶斯网络中各随机变量的局部条件概率表。
4. 船舶引航风险的估计
为了测试本文所设计的贝叶斯网络性能,我们用SamIam软件进行建模。SamIam是由加州大学洛杉矶分校(UCLA)自动推理研究小组的Adnan Darwiche教授基于java平台开发的一个贝叶斯综合建模工具,该软件可以从http://reasoning.cs.ucla.edu/samiam/免费下载。首先根据图1中描述的各要素以及要素之间的相互依赖关系在SamIam中建立对应的网络拓扑结构,然后将表1中规定的各节点值域以及表2中各变量的先验概率和条件概率表输入到SamIam所构建的网络中对应的节点。图2是在SamIam中建立的船舶引航安全贝叶斯网络模型以及对应节点的概率值。
我们用15个船舶引航案例的状态数据对贝叶斯网络进行测试。这15个案例包括6个(案例1~6)没有发生事故的案例和9个(案例7~15)发生引航事故的案例。具体状态数据如表3所示。贝叶斯网络根据每个案例的状态数据所预测的船舶当时处于“安全”状态的概率值列在该表的最下面一行。这里我们以案例15为例分析贝叶斯网络的预测结果,该案例的基本情况是:1997年1月某日晚上10时15分,某货轮T在离泊过程中与另一进港轮船B在进港航道NO.3号浮标附近发生碰撞,导致T轮沉没、1名引航员和4名船员死亡。对该海事案例进行分析得到T轮在与B轮发生碰撞前的航行状态数据为:夜间引航、能见度低、引航过程没有细心操纵、瞭望不充分、在有它船需要采取避碰措施的情况下,判断错误、操作不当,舵机失灵、航速没有及时降低。将这些状态数据输入前面设计好的贝叶斯网络中对该轮的安全风险进行预测,相应节点概率变化如图3所示。对比图2和图3可以看出,船舶引航在通常情况下发生

Figure 1. Bayesian network structure of ship pilotage warning
图1. 船舶引航预警的贝叶斯网络结构

Table 1. The value of each node in the Bayesian network and its semantic meaning
表1. 贝叶斯网络中各节点的取值及其所表示的语义
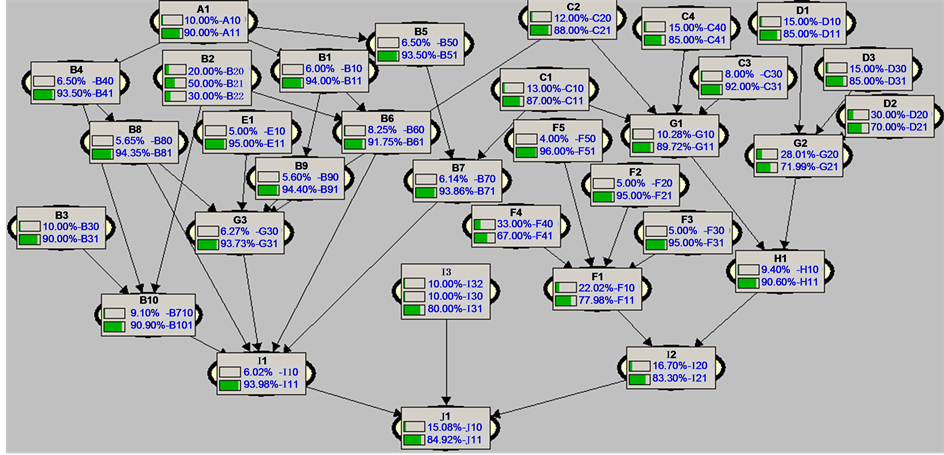
Figure 2. The probability graph of each node in our Bayesian network based on the SamIam
图2. 在SamIam中建立的船舶引航安全贝叶斯网络中各节点的概率图
Table 2. A priori probability of the associated root nodes in the Bayesian network
表2. 贝叶斯网络中相关根节点的先验概率
Table 3. Some factors in the case of the actual value of the pilot and the corresponding safety probability value
表3. 一些实际引航案例中因素的取值及相应的安全概率值
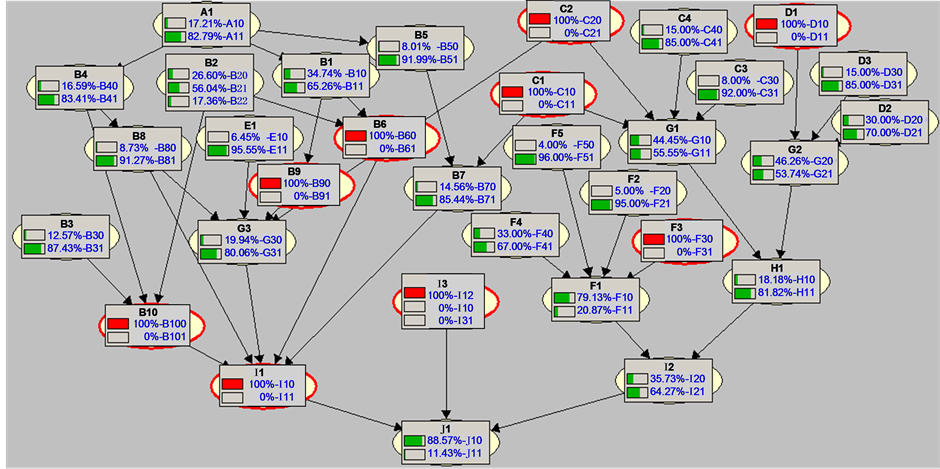
Figure 3. The Bayesian network of vessel T before the collision
图3. T轮碰撞前的贝叶斯网络概率图
事故的概率较低,安全程度较高(安全的概率值为0.85),而发生碰撞前的安全程度明显下降,当时安全的概率值只有0.13。根据这样的结果,我们可以认为船舶发生事故的可能性比较大,应该及时给出预警信息,以引起操作人员的注意,及时采取措施,避免事故的发生。
对比分析这15个实际案例以及相应的贝叶斯网络预测结果,我们可以看出,船舶引航事故的发生多数跟引航员、船员本身有关,表现在责任心不够、工作不细心、没有充分瞭望,而船舶的航速和引航员对船舶的操纵能力往往是导致引航事故发生两个重要直接因素,一旦意识到出现险情的时候,如果操作人员能够对船舶实施正确的操纵或者及时调整航速,险情还是能够得到控制的。表中那6个没有发生事故的案例基本上都是船舶得到有效控制的,而发生事故的9个案例要么是航速太高,要么是船员操纵不当。对比案例3和案例7,在主机失灵的情况下,船舶自身因素引起的风险概率值从0.22上升到0.33,但是如果操作人员具有熟练的操作技能,能够加强沟通、充分瞭望,细心操纵,那么安全程度还是较高的,这时候“安全”的概率值达到0.85。反之,如果技术不熟练、没有充分瞭望和沟通,那么安全风险会增加很多,“不安全”的概率值达到0.26。如果这时候航速没有得到有效控制,那么安全风险更是上升到0.70。就贝叶斯网络的综合预测结果来看,前6个案例的“不安全”概率比正常引航的有所提高(正常情况下只有0.15),而发生事故的那些案例的“不安全”概率却明显的增加了,这表明本文提出的网络模型能够对相应的险情做出预警。
5. 结论
本文针对船舶引航过程的安全问题,提出了一种用于风险预警的贝叶斯网络模型。首先根据文献调研和专家访谈,分别从船舶操纵能力、船舶可操纵性和船舶航速三个方面来分析引航安全问题,确定影响船舶引航安全的32个因素。然后根据专家知识确定这些因素之间的相互依赖关系,以及它们之间相互依赖的程度,建立船舶引航安全预警的贝叶斯网络模型。将实际的海事事故案例应用于所构建的网络,发现在给定的那些海事案例数据状态下,船舶引航的安全风险明显高于正常引航的风险。因此本文提出的模型可以用于实际的引航风险情景,在提高船舶引航安全方面具有应用价值。
基金项目
广东省交通运输厅科技项目(No:2012-02-045);广东省普通高校特色创新项目(A510602);广州航海学院创新强校工程建设项目(B510620)。
文章引用
张树波,唐强荣. 基于贝叶斯网络的船舶引航风险预警
Risk Warning for Ship Pilotage Based on Bayesian Networks[J]. 建模与仿真, 2016, 05(02): 40-49. http://dx.doi.org/10.12677/MOS.2016.52006
参考文献 (References)
- 1. 陈正华, 方泉根. 规范化安全评估(FSA)在上海港船舶引航安全工作中的应用[J]. 中国航海, 2005(1): 1-6.
- 2. 方泉根, 胡甚平. FSA在船舶引航风险评估中的应用 [J]. 哈尔滨工程大学学报, 2006, 27(3): 329-334.
- 3. 马飞. 综合安全评估在船舶引航安全评估中的应用[D]: [硕士学位论文]. 大连: 大连海事大学, 2008.
- 4. 周丽丽, 胡甚平. 船舶引航风险成因灰色综合评价模型[J]. 上海海事大学学报, 2008, 29(2): 21-25.
- 5. Friedman, N. (2004) Inferring Cellular Networks Using Probabilistic Graphical Models. Science, 303, 799-805. http://dx.doi.org/10.1126/science.1094068
- 6. Kashino, K., Nakadai, K., Kinoshita, T., et al. (1995) Application of Bayesian Probability Network to Music Scene Analysis. Computational Auditory Scene Analysis, 1, 1-15.
- 7. Li, K.X., Yin, J., Bang, H.S., et al. (2014) Bayesian Network with Quantitative Input for Maritime Risk Analysis. Trans-portmetrica A: Transport Science, 10, 9-118. http://dx.doi.org/10.1080/18128602.2012.675527
- 8. Eleye-Datubo, A.G., Wall, A., Saajedi, A., et al. (2006) Enabling a Powerful Marine and Offshore Decision-Support Solution through Bayesian Network Technique. Risk Analysis, 26, 695-721. http://dx.doi.org/10.1111/j.1539-6924.2006.00775.x
- 9. Hänninen, M. and Kujala, P. (2012) Influences of Va-riables on Ship Collision Probability in a Bayesian Belief Network Model. Reliability Engineering & System Safety, 102, 27-40. http://dx.doi.org/10.1016/j.ress.2012.02.008
- 10. Trucco, P., Cagno, E., Ruggeri, F., et al. (2007) A Bayesian Belief Network Modelling of Organisational Factors in Risk Analysis: A Case Study in Maritime Transporta-tion. Reliability Engineering & System Safety, 93, 845-856. http://dx.doi.org/10.1016/j.ress.2007.03.035
- 11. Khakzad, N., Khan, F. and Amyotte, P. (2011) Safety Analysis in Process Facilities: Comparison of Fault Tree and Bayesian Network Approaches. Reliability Engineering & System Safety, 96, 925-932. http://dx.doi.org/10.1016/j.ress.2011.03.012
- 12. Khakzad, N., Khan, F. and Amyotte, P. (2013) Dynamic Safety Analysis of Process Systems by Mapping Bow-Tie into Bayesian Network. Process Safety and Environmental Protec-tion, 91, 46-53. http://dx.doi.org/10.1016/j.psep.2012.01.005
- 13. Antão, P., Guedes Suares, C., Grande, O., et al. (2009) Analysis of Maritime Accident Data with BBN Models. Safety, Reliability and Risk Analysis: Theory, Methods and Applications. Taylor & Francis Group, London.
- 14. Antão, P. and Soares, C. (2010) Analysis of the Influence of Waves in the Occurrence of Accidents in the Portuguese Coast Using Bayesian Belief Networks. Journal of KONBiN, 13, 105-116. http://dx.doi.org/10.2478/v10040-008-0140-5
- 15. Eleye-Datubo, A.G., Wall, A. and Wang, J. (2008) Marine and Offshore Safety Assessment by Incorporative Risk Modeling in a Fuzzy-Bayesian Network of an Induced Mass Assignment Paradigm. Risk Analysis, 28, 95-112. http://dx.doi.org/10.1111/j.1539-6924.2008.01004.x
- 16. 刘克中, 干伟东, 黄明, 等. 基于贝叶斯网络的船舶溢油风险评价研究[J]. 中国航海, 2012, 35(1): 85-89.
- 17. Zhang, J., Teixeira, Â.P., Guedes Soares, C., et al. (2016) Maritime Transportation Risk Assessment of Tianjin Port with Bayesian Belief Networks. Risk Analysis, 2016, 1-17. http://dx.doi.org/10.1111/risa.12519
- 18. 胡中凯, 尹群, 刘海燕. 基于贝叶斯网络方法对船舶搁浅概率的研究[J]. 舰船科学技术, 2010(2): 23-26.
- 19. Shenping, H., Cunqiang, C. and Quangen, F. (2007) Risk Assessment of Ship Navigation Using Bayesian Learning. 2007 IEEE International Conference on Industrial Engineering and Engi-neering Management, Singapore, 2-4 De- cember 2007, 1878-1882.
- 20. 胡甚平, 方泉根, 蔡存强. 基于贝叶斯网络推理的船舶航行风险评价[C]. 1995-2009航海技术论文选集, 2010(7): 55-56.
- 21. 汤旭红, 刘红太, 蔡存强. 贝叶斯网络在海上船舶碰撞研究中的应用[J]. 中国航海, 2009, 32(2): 58-61.
- 22. Hänninen, M., Mazaheri, A., Kujala, P., et al. (2004) Expert Elicitation of a Navigation Service Implementation Effects on Ship Groundings and Collisions in the Gulf of Finland. Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability, 228, 19-28. http://dx.doi.org/10.1177/1748006X13494533
- 23. Pearl, J. (1988) Probabilistic Reasoning in Intelligent Systems. Morgan Kaufmann, San Mateo.
- 24. Koller, D. and Friedman, N. (2009) Probabilistic Graphical Models: Principles and Techniques—Adaptive Computation and Machine Learning. The MIT Press, Cambridge.
- 25. Murphy, K.P. (1998) A Brief Introduction to Graphical Models and Bayesian Networks. Borgelt Net.
- 26. Pearl, J. (1998) Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference. Morgan Kaufmann, San Francisco.