设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投稿
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
AdvancesinAppliedMathematics
A^
ê
Æ
?
Ð
,2022,11(5),2500-2506
PublishedOnlineMay2022inHans.http://www.hanspub.org/journal/aam
https://doi.org/10.12677/aam.2022.115264
ä
k
~
ê
Ý
˜
Ç
-
Ó
.
½
5
©
Û
ÆÆÆ
ZZZ
ì
À
à
’
Œ
Æ&
E
‰
Æ
†
ó
§
Æ
§
ì
À
S
Â
v
F
Ï
µ
2022
c
4
11
F
¶
¹
^
F
Ï
µ
2022
c
5
6
F
¶
u
Ù
F
Ï
µ
2022
c
5
17
F
Á
‡
©
ï
Ä
ä
k
~
ê
Ý
˜
Ç
-
Ó
.
½
55
Ÿ
§
Ï
L
‚
5
C
q
‰
Ñ
²
ï
:
-
½
¿
©
^
‡
§
¿
^
Dulac
¼
ê
Ñ
Ã
4
•
‚
(
Ø
"
Ï
L
E
‚
•
¸.
‚
‰
Ñ
4
•
‚
•
3
^
‡
"
•
^
ê
Š
[
y
(
Ø
(
5
"
'
…
c
²
ï
:
§
•
3
5
§
•
˜
5
§
4
•
‚
QualitativeAnalysisofa
Prey-PredatorModelwith
aConstantInvestmentRate
ofPreySpecies
XueleiWang
CollegeofInformationScienceandEngineering,ShandongAgriculturalUniversity,Tai’an
Shandong
Received:Apr.11
th
,2022;accepted:May6
th
,2022;published:May17
th
,2022
©
Ù
Ú
^
:
Æ
Z
.
ä
k
~
ê
Ý
˜
Ç
-
Ó
.
½
5
©
Û
[J].
A^
ê
Æ
?
Ð
,2022,11(5):2500-2506.
DOI:10.12677/aam.2022.115264
Æ
Z
Abstract
Inthispaper,thequalitativepropertiesofthepredator-preymodelwithconstant
investmentratearestudied.Thesufficientconditionsforthestabilityofequilibrium
pointsareobtainedbylinearizationmethod;andtheconclusionfornolimitcycle
isprovedbyDulacfunction;byconstructingboundarylines,theconditionforthe
existenceofalimitcycleisgained.Finally,numericalsimulationisusedtoverifythe
correctnessoftheconclusion.
Keywords
EquilibriumPoint,Existence,Uniqueness,LimitCycle
Copyright
c
2022byauthor(s)andHansPublishersInc.
This work is licensed undertheCreative Commons Attribution InternationalLicense(CCBY4.0).
http://creativecommons.org/licenses/by/4.0/
1.
Ú
ó
é
u
ä
k
~
ê
Ý
˜
Ç
-
Ó
X
Ú
ï
Ä
,
@
Ï
ó
Š
k
[1,2],
©
z
[1]
•[
?
Ø
.
(
˙
x
=
bx
2
(1
−
x
k
)
−
βxy
+
h,
˙
y
=
−
cy
+
dxy.
²
ï
:
9 4
•
‚
•
3
5
Ú
5
.
¿
é
•
˜
„
.
©
|
•
3
^
‡
.
©
z
[2]
é
Ó
ö
k
Ý
˜
Ç
X
Ú
?
1
½
5
©
Û
.
©
z
[3–5]
©
O
?
Ø
Ø
Ó
.
e
ä
k
~
ê
Ý
˜
Ç
Û
5
Ÿ
.
Ù
¥
©
z
[3]
•
Ä
«
+
ä
k
~
ê
Ý
˜
Ç
…
k
—
Ý
›
‘
holling-IV
.
Ó
X
Ú
(
˙
x
=
x
(
g
(
x
)
−
y
β
+
x
2
)+
h,
˙
y
=
y
(
−
a
−
by
+
cx
β
+
x
2
)
.
½
51
•
.
©
z
[6–8]
?
Ø
ü
«
+
©
O
k
~
Ý
˜
Ç
Ú
~
Â
¼
Ç
-
Ó
X
Ú
½
55
Ÿ
.
þ
ã
ó
Š
§
.
m
à
¼
ê
Œ
Ñ
´´
²
¡
)
Û
½z
{
´
)
Û
X
Ú
§
©
ï
Ä
.
z
{
±
Ø
´
²
¡
)
Û
.
?
Ø
(
J
3
u
.
z
{
Ú
p
Û
:
a
.
©
Û
,
X
Ú
Ñ
y
"
¢
Ü
½
"
A
Š
ž
,
Ù
-
½
5
Ø
U
d
‚
5
C
q
X
Ú
-
½
5
Ñ
.
I
‡
?
˜
Ú
‰
C
†
ä
.
DOI:10.12677/aam.2022.1152642501
A^
ê
Æ
?
Ð
Æ
Z
©
•
Ä
ä
k
õ
U
‡
A
…
ä
k
~
ê
Ý
˜
Ç
-
Ó
.
˙
x
=
x
(
a
−
bx
1
2
)
−
ycx
1
2
+
h,
˙
y
=
y
(
−
d
+
cex
1
2
)
.
(1)
Ù
¥
a,b,c,d,e,h
Ñ
´
Œ
u
0
~
ê
.
æ
C
†
¯
x
=
x
1
2
,¯
y
=
c
a
y
,
τ
=
a
2
t
(
•
•
B
å
„
§
·
‚
E
æ
^
Î
Ò
x,y,t
),
.
(1)
Œ
z
•
˙
x
=
x
(1
−
b
a
x
)
−
y
+
h
ax
,
˙
y
=¯
ry
(
x
−
¯
m
)
,
(2)
Ù
¥
¯
r
=
2
ce
a
,
¯
m
=
d
ce
.
•
~
ë
ê
§
2
-
˜
x
=
b
a
x
,˜
y
=
b
a
y
,
C
†
§
·
‚
E,
^
Î
Ò
x,y
L
«
˜
x,
˜
y
.
.
(2)
Œ
±
{
z
•
X
e
d
X
Ú
˙
x
=
x
(1
−
x
)
−
y
+
I
x
=
P
(
x,y
)
,
˙
y
=
ry
(
x
−
m
) =
Q
(
x,y
)
,
(3)
Ù
¥
I
=
bh
a
3
,
r
=
a
¯
r
b
,
m
=
b
¯
m
a
.
•
Ä
¢
S
)
¿Â
,
=
3
R
+
2
=
{
(
x,y
)
|
x>
0
,y>
0
}
S
?
Ø
,
¿
P
R
∗
2
=
{
(
x,y
)
|
x>
0
,y
≥
0
}
.
©
©
¤
n
‡
Ü
©
µ
1
˜
Ü
©
^
‚
5
C
q
•{
?
Ø
²
ï
:
9
Ù
5
¶
1
Ü
©
^
ƒ
²
¡
©
Û
{
‰
Ñ
4
•
‚
•
3
5
Ú
Ø
•
3
5
^
‡
¶
1
n
Ü
©
ê
Š
[
,
y
(
Ø
(
5
.
2.
²
ï
:
9
Ù
5
)
•
§
|
P
(
x,y
) = 0
,
Q
(
x,y
) = 0
,
(4)
d
Q
(
x,y
)= 0,
y
= 0
½
x
=
m
.
r
y
=0
“
\
P
(
x,y
)=0,
x
2
(
x
−
1)=
I
,
x
2
(
x
−
1)=
I
•
k
˜
‡
Š
,
•
k
,
K
k>
1.
r
x
=
m
“
\
P
(
x,y
)=0,
y
=
m
(1
−
m
)+
I
m
,
P
•
y
∗
.
P
X
Ú
(3)
²
ï
:
•
E
1
(
k,
0),
E
2
(
m,y
∗
).
l
P
(
x,y
)
¥
)
Ñ
y
,
P
•
F
(
x
):
F
(
x
)=
x
(1
−
x
)+
I
x
,
F
0
(
x
)=
x
2
−
2
x
3
−
I
x
2
H
1
(
x
)
x
2
.
d
H
0
1
(
x
)=
−
6
x
(
x
−
1
3
),
x
=
1
3
•
H
1
(
x
)
•
˜
7
:
.
H
1
(
1
3
) =
1
27
−
I
,
©
Û
Œ
•
:
I>
1
27
ž
,
F
(
x
)
î
‚
ü
N4
~
.
I
=
1
27
ž
,
F
(
x
)
ü
N4
~
;
0
<I<
1
27
ž
,
F
(
x
)
k
ü
‡
7
:
,
P
•
m
1
,m
2
,
K
k
0
<m
1
<
1
3
<m
2
.
3
«
m
(0
,m
1
)
S
,
F
(
x
)
î
‚
ü
N4
~
§
3
«
m
(
m
1
,m
2
)
S
,
F
(
x
)
î
‚
ü
N4
O
§
3
«
m
(
m
2
+
∞
)
S
,
F
(
x
)
ü
N4
~
.
Û
Ü
4
Š
F
(
m
1
)
>
0,lim
x
→
0
+
F
(
x
) = +
∞
,lim
x
→
+
∞
F
(
x
) =
−∞
.
n
þ
Œ
•
§
0
<m<k
ž
,
E
2
(
m,y
∗
)
´
•
˜
²
ï
:
.
X
Ú
(3)
Jacobi
Ý
•
DOI:10.12677/aam.2022.1152642502
A^
ê
Æ
?
Ð
Æ
Z
J
=
1
−
2
x
−
I
x
2
−
1
ryr
(
x
−
m
)
.
(5)
½
n
1(i)
m>k
ž
,
E
1
(
k,
0)
´
-
½
(
:
¶
0
<m<k
ž
,
E
1
(
k,
0)
´
Q
:
,
m
=
k
ž
,
E
1
(
k,
0)
´
Q
(
:
.
(ii)
0
<m<k
ž
,
E
2
(
m,y
∗
)
´
•
˜
²
ï
:
.
œ
/
1
I
≥
1
27
ž
,
E
2
(
m,y
∗
)
´
-
½
:
½
(
:
.
œ
/
2
3
0
<I<
1
27
^
‡
e
§
e
m
2
(1
−
2
m
)
<I
,
K
E
2
(
m,y
∗
)
´
-
½
:
½
(
:
.
e
m
2
(1
−
2
m
) =
I
,
K
E
2
(
m,y
∗
)
´
¥
%
.
e
m
2
(1
−
2
m
)
>I
,
K
E
2
(
m,y
∗
)
´
Ø
-
½
:
½
(
:
.
y
²
(i)
k
©
Û
²
ï
:
E
1
(
k,
0)
Û
:
a
.
9
-
½
5
•
Ä
k
2
(
k
−
1) =
I
,
E
1
(
k,
0)
é
A
Jacobi
Ý
J
E
1
(
k,
0)
=
1
−
2
k
−
I
k
2
−
1
0
r
(
k
−
m
)
=
2
−
3
k
−
1
0
r
(
k
−
m
)
m>k
ž
,Jacobi
Ý
k
ü
‡K
A
Š
,
¤
±
E
1
(
k,
0)
´
-
½
(
:
¶
0
<m<k
ž
,Jacobi
Ý
k
ü
‡
É
Ò
A
Š
,
Ï
d
E
1
(
k,
0)
´
Q
:
.
m
=
k
ž
,
k
˜
‡K
A
Š
,
k
˜
‡
"
A
Š
,
r
X
Ú
(3)
²
ï
:
E
1
(
k,
0)
²
£
‹
I
:
?
,
X
Ú
˙
x
= (2
−
3
k
)
x
−
y
+(
−
1+
I
k
3
)
x
2
+
p
3
(
x,y
)
,
˙
y
=
rxy,
(6)
Ù
¥
p
3
(
x,y
)
´
g
ê
Ø
$
u
n
g
)
Û
¼
ê
.
æ
^
š
ò
z
‚
5
O
†
x
=
ξ
+
η,
y
= (2
−
3
k
)
ξ,
2
-
dτ
=
−
(3
k
−
2)
dt
,
Ò
Œ
±
r
X
Ú
(7)
=
z
¤
©
z
[9]
½
n
7.1
/
ª
˙
ξ
=
−
r
3
k
−
2
ξ
2
−
r
3
k
−
2
ξη
=
ψ
(
ξ,η
)
,
˙
η
=
η
+
1
3
k
−
2
(1
−
I
k
3
+
r
)
ξ
2
+
1
3
k
−
2
(2
−
2
I
k
3
+
r
)
ξη
+
1
3
k
−
2
(1
−
I
k
3
+
r
)
η
2
+
p
3
(
ξ,η
) = Φ(
ξ,η
)
,
(7)
•
l
Φ(
ξ,η
)
¥
)
Ñ
η
,
-
η
=
b
2
ξ
2
+
b
3
ξ
3
+
···
,
'
Ó
g
‘X
ê
§
b
2
=
−
1
3
k
−
2
(
r
+
1
k
),
“
\
ψ
(
ξ,η
),
)
m
= 2
,a
m
=
−
r
3
k
−
2
<
0,
d
½
n
7.1
œ
/
(iii)
•
,
E
1
(
k,
0)
´
Q
(
:
.
(ii)
©
Û
²
ï
:
E
2
(
m,y
∗
)
Û
:
a
.
9
-
½
5
DOI:10.12677/aam.2022.1152642503
A^
ê
Æ
?
Ð
Æ
Z
5
¿
y
∗
=
m
(1
−
m
)+
I
m
,
Ù
é
A
Jacobi
Ý
•
J
E
1
(
k,
0)
=
1
−
2
m
−
I
m
2
−
1
ry
∗
0
!
=
1
−
2
m
−
I
m
2
−
1
r
[
m
(1
−
m
)+
I
m
]0
!
Ù
A
Š
•
λ
1
,λ
2
,
K
λ
1
+
λ
2
= 1
−
2
m
−
I
m
2
=
F
0
(
m
)
,λ
1
·
λ
2
=
r
[
m
(1
−
m
)+
I
m
]
>
0.
œ
/
1
d
½
n
1
c
¡
©
Û
Œ
•
§
I
≥
1
27
ž
§
ð
k
F
0
(
m
)
<
0,
•
k
ü
‡K
¢
A
Š
§
½
ü
‡
¢
Ü
u
"
Ý
EŠ
§
c
ö
=
´
-
½
(
:
§
ö
Ò
´
-
½
:
.
œ
/
2
0
<I<
1
27
…
F
0
(
m
)
>
0
ž
,
=
m
2
(1
−
2
m
)
>I
ž
,
k
ü
‡
¢
A
Š
§
½
ü
‡
¢
Ü
Œ
u
"
Ý
EŠ
§
c
ö
=
´
Ø
-
½
(
:
§
ö
Ò
´
Ø
-
½
:
.
0
<I<
1
27
…
F
0
(
m
)
<
0
ž
,
=
m
2
(1
−
2
m
)
<I
ž
,
k
ü
‡K
¢
A
Š
§
½
ü
‡
¢
Ü
u
"
Ý
EŠ
§
c
ö
=
´
-
½
(
:
§
ö
Ò
´
-
½
:
.
0
<I<
1
27
…
F
0
(
m
)=0
ž
,
=
m
2
(1
−
2
m
) =
I
ž
,
ü
‡
¢
Ü
•
"
Ý
EŠ
,
é
A
Û
:
a
.
•
¥
%
.
3.
4
•
‚
•
3
5
½
n
2(i)
m>k
ž
,
X
Ú
(3)
3
1
˜
••
S
Ã
4
•
‚
,
E
1
(
k,
0)
´
-
½
…
´
Û
-
½
.
(ii)
3
0
<m<k
^
‡
e
,
I
≥
1
27
ž
,
X
Ú
(3)
3
1
˜
••
S
Ã
4
•
‚
,
E
2
(
m,y
∗
)
´
-
½
…
´
Û
-
½
.
y
²
(i)
m>k
ž
,
X
Ú
(3)
3
1
˜
••
S
Ã
²
ï
:
,
dy
dt
|
x
=0
=
−
rym<
0,
¤
±
l
y
¶
?
Ñ
u
;
‚
´
•e
,
y
¶
´
Ã
ƒ
‚
ã
,
…
Ù
þ
Ã
²
ï
:
.
x
¶
´
;
‚
§
¤
±
3
1
˜
–•
S
Ã
Û
É
4
;Ú
4
;
‚
.
²
¡
þ
;
‚
w
4
•
8
•
U
´
²
ï
:
!
4
;
‚
!
Û
É
4
;
‚
.
Ï
dl
R
∗
2
S
Ñ
u
;
‚
w
4
•
8
•
U
´
Û
:
.
d
½
n
1
œ
/
(i)
•
,
E
1
(
k,
0)
´
R
∗
2
S
•
˜
²
ï
:
,
…
´
-
½
,
¤
±
´
Û
-
½
.
(ii)
E
Dulac
¼
ê
B
(
x,y
) =
y
−
1
,
K
D
∂
(
BP
)
∂x
+
∂
(
BQ
)
∂Y
=
1
y
F
0
(
x
)
≤
0,
…
=
3
x
=
1
3
ž
,
D
= 0,
d
Bendixson-Dulac
O
{
[10]
•
§
3
1
˜
–•
S
§
Ã
4
•
‚
.
(
Ü
½
n
1
•
,
E
2
(
m,y
∗
)
´
-
½
,
Ï
d
´
Û
-
½
.
k
Œ
Ý
˜
Ç
,
…
Ó
«
+
g
,
k
Ç
u
,
˜
‡
ê
Š
ž
,
ü
«
+
•
Ï
-
½
3
E
2
(
m,y
∗
)
N
C
,
v
k
±
Ï
y–
.
½
n
3
3
0
<m<k
^
‡
e
,
0
<I<
1
27
…
m
2
(1
−
2
m
)
>I
ž
,
X
Ú
(3)
3
1
˜
••
S
•
3
-
½
4
•
‚
.
y
²
E
2
(
m,y
∗
)
´
Ø
-
½
:
½
(
:
,
Œ
Š
‚
•
¸.
‚
.
e
¡
E
‚
•
¸.
‚
.
α
=
max
m
≤
x
≤
k
{
F
(
x
)
}
,
x
=
ε
0
,
Ù
¥
ε
0
´
¿
©
ê
§
'
X
Œ
•
0.0001
§
x
¶
,
†
‚
x
=
k
,
-
‚
L
1
:˙
x
=
α
−
y,
˙
y
=
ry
(
x
−
m
)
;
‚
§
Ð
©
:
•
A
(
k,α
),
ª
:
•
B
(
m,β
)
˜
ã
,
Ù
¥
β
•
;
‚
†
†
‚
x
=
m
:
p‹
I
¶
-
‚
L
2
:
y
=
β
,
P
L
2
†
x
=
ε
0
:
•
C
(
ε
0
,β
).
‚
•
¸.
‚
=
•
OE
1
ABCO
.
DOI:10.12677/aam.2022.1152642504
A^
ê
Æ
?
Ð
Æ
Z
Ï
dx
dt
|
x
=
ε
0
>
0,
dy
dt
|
x
=
ε
0
=
−
ry
(
ε
0
−
m
)
<
0,
¤
±
l
x
=
ε
0
?
Ñ
u
;
‚
´
•
m
e
?
\
‚
•
¶
x
¶
´
;
‚
;
Ï
dx
dt
|
x
=
k
=
−
y<
0,
dy
dt
|
x
=
k
=
ry
(
k
−
m
)
>
0,
g
†
‚
x
=
k
Ñ
u
;
‚
,
´
l
m
e
•
?
\
«
•
;
Ï
˙
x
|
(3)
<
˙
x
|
L
1
<
0,˙
y
|
(3)
=˙
x
|
L
1
>
0.
l
L
1
Ñ
u
;
‚
´
l
m
e
•
?
\
†
þ
•
¶
Ï
˙
y
|
L
2
<
0,
Ï
d
g
L
2
Ñ
u
;
‚
´
g
þ
e
?
\
‚
•
.
d
poincare-Bendixson
½
n
•
,
3
‚
•
S
Ü
k
-
½
4
•
‚
.
4.
ê
Š
[
·
‚
©
O
é½
n
2
Ú
½
n
3
¥
ë
ê
ä
N
ê
Š
,
Ï
L
matlab
^
‡
5
u
(
Ø
(
5
.
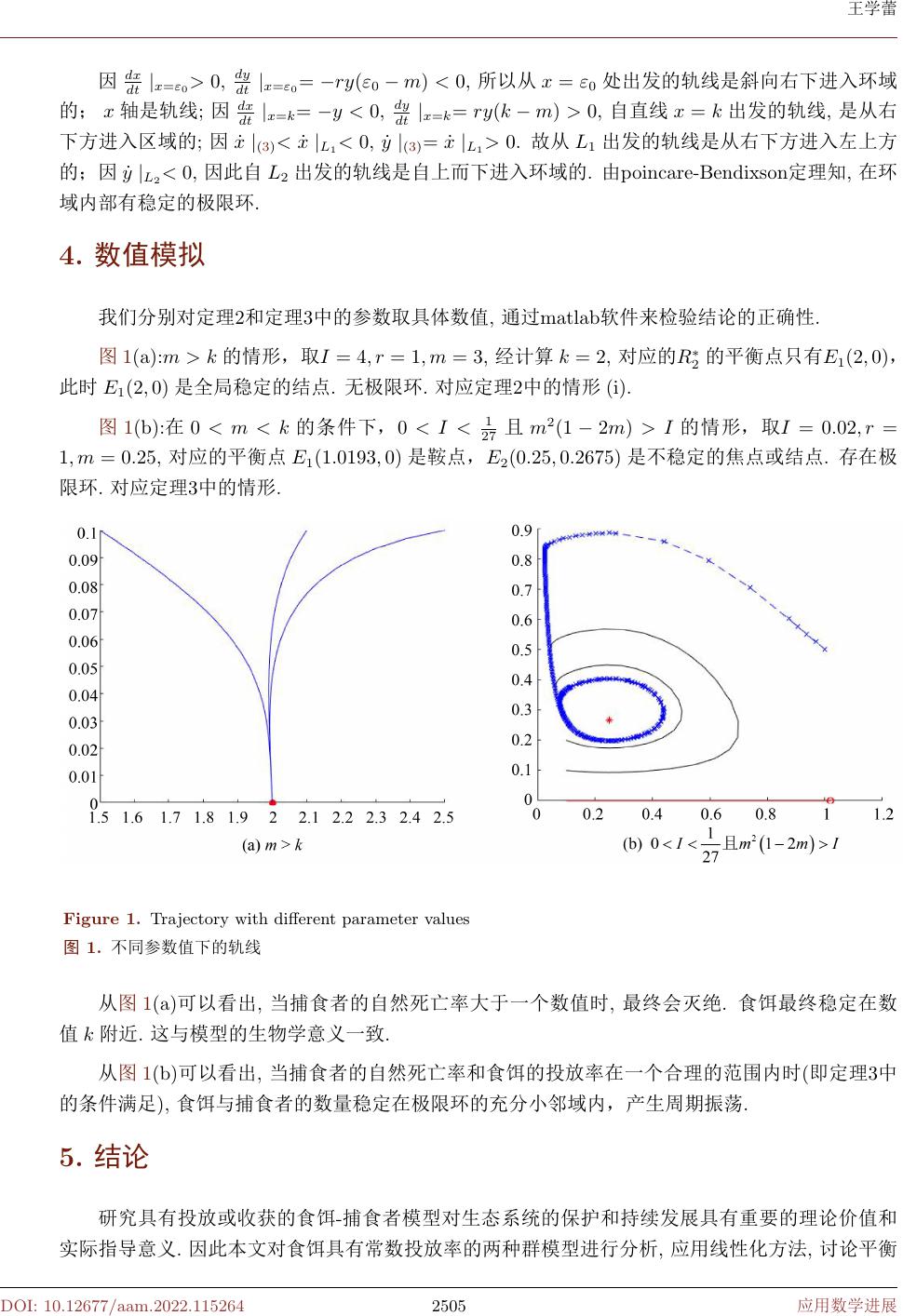
ã
1(a):
m>k
œ
/
§
I
= 4
,r
= 1
,m
= 3,
²
O
Ž
k
= 2,
é
A
R
∗
2
²
ï
:
•
k
E
1
(2
,
0)
§
d
ž
E
1
(2
,
0)
´
Û
-
½
(
:
.
Ã
4
•
‚
.
é
A
½
n
2
¥
œ
/
(i).
ã
1(b):
3
0
<m<k
^
‡
e
§
0
<I<
1
27
…
m
2
(1
−
2
m
)
>I
œ
/
§
I
=0
.
02
,r
=
1
,m
= 0
.
25,
é
A
²
ï
:
E
1
(1
.
0193
,
0)
´
Q
:
§
E
2
(0
.
25
,
0
.
2675)
´
Ø
-
½
:
½
(
:
.
•
3
4
•
‚
.
é
A
½
n
3
¥
œ
/
.
Figure1.
Trajectorywithdifferentparametervalues
ã
1.
Ø
Ó
ë
ê
Š
e
;
‚
l
ã
1(a)
Œ
±
w
Ñ
,
Ó
ö
g
,
k
Ç
Œ
u
˜
‡
ê
Š
ž
,
•
ª
¬
«
ý
.
•
ª
-
½
3
ê
Š
k
N
C
.
ù
†
.
)
Ô
Æ
¿Â˜
—
.
l
ã
1(b)
Œ
±
w
Ñ
,
Ó
ö
g
,
k
Ç
Ú
Ý
˜
Ç
3
˜
‡
Ü
n
‰
Œ
S
ž
(
=
½
n
3
¥
^
‡
÷
v
),
†
Ó
ö
ê
þ
-
½
3
4
•
‚
¿
©
•
S
§
)
±
Ï
.
5.
(
Ø
ï
Ää
k
Ý
˜
½
Â
¼
-
Ó
ö
.
é
)
X
Ú
o
Ú
±
Y
u
Ð
ä
k
-
‡
n
Ø
d
Š
Ú
¢
S
•
¿Â
.
Ï
d
©
é
ä
k
~
ê
Ý
˜
Ç
ü
«
+
.
?
1
©
Û
,
A^
‚
5
z
•{
,
?
Ø
²
ï
DOI:10.12677/aam.2022.1152642505
A^
ê
Æ
?
Ð
Æ
Z
:
a
.
9
Ù
-
½
5
,
é
u
"
A
Š
œ
/
,
æ
^
?
ê
Ð
m
r
²
ï
:
£
‹
I
:
?
1
?
Ø
,
¿æ
^
·
C
†
©
Û
Ù
a
.
.
é
u
4
•
‚
,
©
æ
^
E
‚
•
¸.
‚
•
ª
ä
Ù
•
3
5
,
4
•
‚
•
3
^
‡
•
Ò
´
ü
«
+
X
Ú
)
±
Ï
^
‡
.
Ï
L
·
À
ë
ê
Ú
˜
Ð
©
^
‡
,
$
^
Matlab
±
›
ƒ
A
;
‚
ã
§
?
˜
Ú
y
(
Ø
(
5
.
ë
•
©
z
[1]
º
§
u
,
•
=
š
.
«
+
ä
k
~
ê
Ý
˜
Ç
Ó
-
.
©
|
¯
K
[J].
ê
Æ
,
“
,1994(4):
541-548.
[2]
o
D
J
,
æ
è
.
˜
a
Ó
ö
k
Ý
˜
Ç
X
Ú
½
5
©
Û
[J].
Ü
S
Ï
Œ
ÆÆ
, 1995(8):117-122.
[3]
˜
ï
.
ä
k
~
ê
Ý
˜
Ç
Holling-IV
a
Ó
X
Ú
½
5
©
Û
[J].
ò
>
Œ
ÆÆ
(
g
,
‰
Æ
‡
),2018,44(3):213-216+228.
[4]
˜
ï
.
ä
~
Ý
˜
Ç
Ó
-
.
½
5
©
Û
[J].
w
g
Œ
ÆÆ
(
g
,
‰
Æ
‡
),2019,
40(2):97-101.
[5]
˜
ï
.
ä
~
ê
Ý
˜
Ç
Ó
ö
-
.
½
5
©
Û
[J].
ò
>
Œ
ÆÆ
(
g
,
‰
Æ
‡
),2017,
43(4):339-343.
[6]
ù
?
û
,
Ü
‹
,
´
CC
.
˜
a
ä
k
Ý
˜
Ç
Ú
Ó
ö
ä
k
Ó
¼
Ç
š
g
£
Ó
X
Ú
Û
©
Û
[J].
ê
Æ
¢
‚
†
@
£
,2016,46(7):288-292.
[7]
Ü
¹
,
p
©
#
,
±
s
.
ü
«
+
©
O
k
~
Ý
˜
Ç
Ú
~
Â
¼
Ç
Holling-IV
a
Ó
X
Ú
[J].
3
Œ
Æ
Æ
(
n
Æ
‡
),2011,49(1):11-15.
[8]Si,C.B.(2015)TheExistenceofThreeLimitCyclesforLotka-VolterraSystemswithTwo
SpeciesBoth HavingaConstantHarvestRateorInvestmentRate.
ProceedingsoftheInstitu-
tionofMechanicalEngineers,PartD:JournalofAutomobileEngineering
,
226
,410-418.
[9]
Ü
¥
,
¶
Ó
;
,
‘
©
E
,
Â
U
.
‡
©•
§
½
5
n
Ø
[M].
®
:
‰
Æ
Ñ
‡
,1985:130-136.
[10]
ê
•
,
±
Â
ó
.
~
‡
©•
§
½
5
†
-
½
5
•{
[M].
®
:
‰
Æ
Ñ
‡
,2001:158-160.
DOI:10.12677/aam.2022.1152642506
A^
ê
Æ
?
Ð