设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投稿
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
PureMathematics
理论数学
,2022,12(5),894-910
PublishedOnlineMay2022inHans.http://www.hanspub.org/journal/pm
https://doi.org/10.12677/pm.2022.125099
非线性奇异系统的相关问题研究
彭思瑶
浙江师范大学,浙江金华
收稿日期:
2022
年
4
月
22
日;录用日期:
2022
年
5
月
24
日;发布日期:
2022
年
5
月
31
日
摘要
奇异系统,也称为描述系统,广义状态空间系统,隐式系统,微分代数系统或半状态系统。它在电
力系统,经济系统,及电子网络等领域有着广泛的应用,很多问题都可以以奇异系统作为背景进
行研究。奇异系统的理论研究经过几十年的发展,已经取得了一些令人瞩目的成果,并且应用也
十分广泛,譬如在电气,机械系统,无损传输线,柔性臂控制机器人等实际系统中都有广泛应用。
本文主要运用平均脉冲间隔和线性矩阵不等式的方法讨论非线性奇异脉冲切换系统的指数稳定性
与
L
2
-
增益。
关键词
非线性奇异脉冲系统,
L
2
-
增益,线性矩阵不等式,非线性混合奇异脉冲切换系统
ResearchonSomeRelatedProblemsof
NonlinearSingularSystems
SiyaoPeng
ZhejiangNormalUniversity,JinhuaZhejiang
Received:Apr.22
nd
,2022;accepted:May24
th
,2022;published:May31
st
,2022
Abstract
Singularsystems,alsoknownasdescriptionsystems,generalizedstatespacesystems,
文章引用
:
彭思瑶
.
非线性奇异系统的相关问题研究
[J].
理论数学
,2022,12(5):894-910.
DOI:10.12677/pm.2022.125099
彭思瑶
implicitsystems,differentialalgebraicsystemsorsemistatesystems.Ithasawide
rangeofapplicationsinpowersystems,economicsystems,andelectronicnetworks.
Singularsystemscanbestudiedinthebackground.Thetheoreticalstudyofsingular
systemshasbeendevelopedforseveraldecades.Someremarkableresultshavebeen
obtained,andtheapplicationisalsoverywide,suchasinelectrical,mechanicalsys-
tems,losslesstransmission line,flexible armcontrol robotandother practicalsystems.
Inthispaper,thesumofaveragepulseintervalsismainlyused.Theexponentialsta-
bilityand
L
2
-gainofnonlinearsingularimpulsive switched systemsarediscussedusing
linearmatrixinequality(LMI)method.
Keywords
NonlinearSingularImpulse System,
L
2
-Gain,LMI, NonlinearMixed SingularImpulse
SwitchedSystem
Copyright© 2022byauthor(s)andHansPublishersInc.
This work is licensed under theCreative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/
1.
引言
1974
年奇异系统
[1]
第一次出现在大众视野中,之后奇异系统受到了研究者的广泛关注,并
且在
1989
年第一本关于奇异系统理论的专著
[2]
也相继问世。奇异系统,也称为描述系统,广义
状态空间系统,隐式系统,它广泛应用在实际系统中,比如:化工,冶金,炼油,航空航天,机械
制造等。奇异系统不仅涉及静态方程,还涉及动态方程,奇异系统也可能会存在脉冲效应,因此
我们不能总是保证奇异系统解的存在唯一性。所以当我们研究奇异系统时,我们还要考虑它的稳
定性条件,系统的正则性以及有无脉冲效应。奇异系统还能够准确地描述物理系统,因此,奇异
系统的稳定性分析在理论上和实践上都具有重要意义。实践中,许多重要和有趣的结果已经在文
献中提出。比如文献
[3]
研究了具有稳定和不稳定子系统的切换奇异系统的稳定性的充分条件。文
献
[4]
针对单输入单输出
(SISO)
切换非严格反馈非线性系统,提出了一种具有给定性能的输出反
馈控制方法。文献
[5]
研究了一类不确定奇异
Markovian
跳跃时滞系统的时滞相关鲁棒指数稳定
性问题。奇异系统的
H
∞
控制问题也受到了许多专家学者的关注,许多文献对其进行了广泛的研
究,如文献
[6]
提出了一种新的奇异系统无记忆
H
∞
控制器设计方法。
另外,
L
2
增益问题越来越受到众多学者的关注,作为一种系统性能的衡量,
L
2
增益是控制系
统的重要输入输出属性,反映了扰动输入对受控输出的影响。
L
2
增益被广泛应用于控制和信号处
DOI:10.12677/pm.2022.125099895
理论数学
彭思瑶
理上。文献
[7]
研究了切换系统的
L
2
增益和
H
∞
控制问题。在文献
[8]
用
ADT
方法讨论了具有
时间变化延迟的切换系统的稳定性和
L
2
增益问题。在文献
[9]
中对受时间变化的传输间隔,时变
传输延迟和通信限制的联网控制系统进行了指数稳定性和诱导
L
2
增益调查。在文献
[10]
中,对非
线性系统指数稳定和
L
2
增益问题做了系统的阐述。许多文献致力于切换系统的
L
2
增益问题这一
块的研究,见文献
[11–13]
,文献
[11]
研究了一类具有平均驻留时间
(ADT)
切换的离散时间切换
系统的稳定性和
L
2
问题,文献
[12]
对不稳定模式的切换系统进行了稳定性和增益分析,文献
[13]
研究了具有快速变化系数的分段连续线性摄动系统的
L
2
增益。但是有关于切换奇异系统的
L
2
增
益问题的研究还比较少。
此外,现有的大部分文章考虑的奇异系统都是线性的
[14–16]
,不可避免的是,现实生活中的
物理系统并不完全是线性的,例如,当我们考虑电力系统,生物系统或机械系统时,它们常表现
出强烈的非线性动态。因此,当我们想要分析或控制这些系统时,线性奇异系统模型已经不能满
足需求,因此非线性奇异系统慢慢成为近年来研究的热点
[17–19]
。如文献
[17]
给出了一类具有任
意开关信号的连续时间非线性互联奇异系统的稳定性分析方法,文献
[18]
研究了一类不确定时滞
切换非线性奇异系统的
H
∞
控制问题。文献
[19]
研究了时滞时变状态切换非线性奇异系统的指数
稳定性问题。
近年来脉冲作为一种有效的控制方法,已广泛应用于卫星轨道转移、药代动力学中的剂量供
应、生态系统管理等领域见
[20–22]
,脉冲微分系统的基本理论在过去的几年中得到了广泛的研究,
见
[23–25]
,它的必要性和重要性在于,在很多情况下,一个真实的系统在某些时刻可能会遇到一
些突变,不能连续考虑。脉冲控制的主要思想是在某一时刻瞬间改变状态。因此,脉冲控制可以
大大降低控制成本和传输的信息量。
我们都知道在
[26]
中首次引入了平均脉冲间隔
(AII)
的概念,它适合于描述较宽的范围的脉
冲信号。许多文献
[27–31]
用平均脉冲间隔
(AII)
的方法分析系统的稳定性,文献
[27]
用模式相关
平均停留时间法研究了具有泄漏延迟和时变延迟的耦合开关神经网络的同步问题,文献
[28]
利用
平均脉冲区间法和李雅普诺夫函数法研究一般时滞混合随机泛函微分系统的指数稳定性。所以我
们可以想到用平均脉冲间隔的方法来分析奇异脉冲切换系统,有关此类文献见
[32–36]
。本文的主
要内容如下:
首先我们介绍了本文的研究背景和预备知识,包括指数稳定性的概念,
Schur
补引理以及柯西
矩阵不等式等下文中需要用到的相关引理与概念。最后结合具体实例论证了定理结果的可行性。
本文的主要贡献在于:构造出来一种李雅普诺夫函数来证明非线性奇异系统的指数稳定性并
且探讨了
L
2
增益的问题;本文运用了平均脉冲区间的方法来证明系统的指数稳定性,并且结合
LMI
的方法来探讨了
L
2
增益的问题。
2.
相关理论概述
定义
1
给定任意初值
x
(
t
0
)
,
在某些特定的切换信号下
σ
(
t
)
下,假如存在
α>
0
,β>
0
使得
系统的解
∥
x
(
t
)
∥≤
α
exp
(
−
β
(
t
−
t
0
))
∥
x
(
t
0
)
∥
,
∀
t
≥
t
0
,则称系统的平衡点
x
=0
是全局一致指数
稳定的。
DOI:10.12677/pm.2022.125099896
理论数学
彭思瑶
引理
1
(Schur
补引理
)
考虑如下
2
阶分块矩阵
SϵR
n
×
n
;
S
11
S
12
S
21
S
22
(1)
其中
,
S
11
∈
R
m
×
m
(
m<n
)
,则以下
3
个命题是等价的:
1)
S<
0
。
2)
S
11
<
0
,S
22
−
S
T
12
S
−
1
11
S
12
<
0
。
3)
S
22
<
0
,S
11
−
S
12
S
−
1
22
S
T
12
<
0
。
引理
2
(
柯西矩阵不等式
)
对于任意的正定矩阵
NϵR
n
×
n
,我们有
2
y
⊤
x
≤
x
⊤
Nx
+
y
⊤
N
−
1
y,
∀
x,yϵR
n
(2)
引理
3
(Feng
etal.
[34])
以下是等价的:
1)
A
=
P
∈
R
n
×
n
:
E
T
P
T
=
PE
≥
0
,P
是非奇异的
}
,
2)
B
=
P
T
=Γ
E
+
U
T
ΦΥ
T
:Γ=Γ
T
∈
R
n
×
n
,E
T
L
Γ
E
L
>
0
,
P
∈
R
(
n
−
r
)
×
(
n
−
r
)
是非奇异的
}
,
这里
E
R
,E
L
,U
T
∈
R
n
×
(
n
−
r
)
且
Υ
∈
R
n
×
(
n
−
r
)
.
假设
1
([37])
对
∀
z
1
,z
2
∈
R
n
非线性函数
f
(
·
)
,g
(
·
)
满足
Lipschitz
条件
:
∥
f
(
z
1
)
−
f
(
z
2
)
∥≤
u
1
∥
z
1
−
z
2
∥
,
∥
g
(
z
1
)
−
g
(
z
2
)
∥≤
u
2
∥
z
1
−
z
2
∥
,u
1
,u
2
>
0
为
Lipschitz
常数。
假设
2
([38])
f
i
(
t,x
(
t
))
是非线性函数满足
:
f
i
(
t,x
(
t
))
⊤
f
i
(
t,x
(
t
))
≤
x
⊤
(
t
)
Q
⊤
i
Q
i
x
(
t
)
,
其中
Q
i
是已知的常数矩阵。
3.
问题描述和预备知识
考虑如下非线性奇异脉冲切换系统,其微分表述如下:
E
σ
(
t
)
˙
x
(
t
)=
A
σ
(
t
)
x
(
t
)+
H
σ
(
t
)
f
σ
(
t
)
(
t,x
(
t
)))+
C
σ
(
t
)
ω
(
t
)
,t
̸
=
t
k
∆
x
(
t
)=
ϕ
k
x
(
t
)
,t
=
t
k
z
(
t
)=
D
σ
(
t
)
x
(
t
)+
F
σ
(
t
)
ω
(
t
)
x
t
+
0
=
x
0
(3
.
1)
这里
x
(
t
)
∈
R
n
,w
(
t
)
∈
R
q
,z
(
t
)
∈
R
p
分别为状态变量,干扰输入和控制输出变量。
E
σ
(
t
)
,A
σ
(
t
)
,
B
σ
(
t
)
,C
σ
(
t
)
,H
σ
(
t
)
,ϕ
k
分别是合适维数的常数矩阵。
E
σ
(
t
)
是奇异矩阵且满足
det
sE
σ
(
t
)
−
A
σ
(
t
)
̸
=
0
并且
rank
E
σ
(
t
)
=
r<n
,
∆
x
(
t
k
)=
x
t
+
k
−
x
(
t
k
)
,
x
t
+
k
=
lim
h
→
0
+
x
(
t
k
+
h
)
,并且
x
(
t
k
)=
x
t
−
k
,说明奇异切换系统
(2.1)
是左连续的,函数
σ
(
t
):[
t
0
,
+
∞
)
→
Q
=
{
1
,
2
,....N
}
表
示切换信号
.
我们记
σ
(
t
)=
i
(
i
∈
Q
)
,表示当
t
∈
[
t
k
−
1
,t
k
)
时,
k
∈
N
,第
i
个子系统被激活,序
列
0=
t
0
<t
1
<t
2
<
···
<t
k
<
···
叫做脉冲切换序列,记为
ζ
=
{
t
1
,t
2
,...
}
。当
t
=
t
k
时系
统
(2.1)
耦合着脉冲效应从
σ
(
t
k
−
1
)
子系统切换到
σ
(
t
k
)
子系统。也就是说,切换和脉冲同步发生
在
t
k
时刻。下面为了方便我们假设初始时刻没有发生切换和脉冲。
DOI:10.12677/pm.2022.125099897
理论数学
彭思瑶
下面给出需要用到的一些基本概念。
定义
2
([39])
对于每一个
i
∈
Q
,奇异系统
(
E
i
,A
i
)
是
1)
正则的,如果
det
(
sE
i
−
A
i
)
不等于
0
;
2)
无脉冲的,如果
deg
(
det
(
sE
i
−
A
i
))=
rank
(
E
i
)
。
定义
3
([40])
系统
(2.1)
被称为有加权的
L
2
增益
γ
,假如在零初始条件下
x
t
+
0
=0
,
不等式
∞
0
exp
(
−
αt
)
∥
z
(
t
)
∥
2
dt
≤
∞
0
∥
ω
(
t
)
∥
2
dt
(3
.
2)
在特定的切换法则
σ
(
t
)
和常数
α>
0
下成立,系统
(2.1)
被称作有普通的
L
2
增益
γ
,当
α
=0
时
.
注
1
在定义
2.1.2
中,
L
2
增益表征了系统对外部干扰的抑制。
γ
的值越小,则系统性能较好。
注
2
可以观察到,如果系统
(2.1)
有
L
2
增益那么它必须有一个加权
L
2
增益。然而,逆命题
不是真的。
定义
4
([26])
平均脉冲间隔
(AII)
:脉冲序列
ξ
=
{
t
1
,t
2
,...
}
的平均脉冲间隔等于
T
a
假如存
在正整数
N
0
和正数
T
a
,使得
(
T
−
t
)
T
a
−
N
0
≤
N
ξ
(
T,t
)
≤
(
T
−
t
)
T
a
+
N
0
,
∀
T
≥
t
≥
0(3
.
3)
这里
N
ξ
(
T,t
)
代表区间
(
t,T
)
上的脉冲次数。
注
3
很多文献得到的稳定性结果中,对脉冲区间的上界和下界可能会有严格的要求,平均脉
冲间隔的出现放宽了这种限制,它是解决非同步脉冲问题的一个很有用的工具。从图
1
,我们可以
观察到其中的脉冲序列是不均匀的,脉冲间隔的上下界区别可以很大也可以很小。所以,平均脉
冲间隔的概念适用于很大范围的脉冲信号。
Figure1.
Averageimpulsiveinterval
图
1.
平均脉冲区间
假设
3
([41])
对每一个
i
∈{
1
,
2
,....,N
}
,奇异系统
(
E
i
,A
i
)
是正则的和无脉冲的。
DOI:10.12677/pm.2022.125099898
理论数学
彭思瑶
4.
非线性奇异脉冲切换系统的指数稳定性
在这一部分,我们将给出系统
(3.1)
关于稳定性的主要结果,并且用平均脉冲区间的概念对系
统
(3.1)
进行
L
2
增益分析,此时考虑的是系统在
w
=0
下指数稳定性的充分条件。
定理
2.1
假设切换奇异系统
(3.1)
满足假设
1
,
2
,
3
,并且存在正定矩阵
P
满足
E
⊤
i
P
i
E
i
≥
0
,
Q
1
是合适维数矩阵,常数
γ
0
>
0
,
β>
0
,
α,α
i
,β,γ
∈
R
并且对所有的
i,j
∈
Q
使得下面不等式
成立:
(
I
+
ϕ
k
)
⊤
E
⊤
j
P
j
E
j
(
I
+
ϕ
k
)
≤
βE
⊤
i
P
i
E
i
(4.1)
E
⊤
i
P
i
A
i
+
A
⊤
i
P
i
E
i
+
Q
⊤
1
Q
1
−
α
i
E
⊤
i
P
i
E
i
E
⊤
i
P
i
H
i
H
⊤
i
P
i
E
i
−
I
≤
0
,
(4.2)
γ
0
=
α
−
ln
β
T
α
>
0
,
(4.3)
这里
β
k
≥
[
λ
max
(
I
+
ϕ
k
)]
2
|
λ
max
(
E
⊤
j
P
j
E
j
)
|
|
λ
min
(
E
⊤
i
P
i
E
i
)
|
,β
=
max
(
β
k
)
�
,并且
α
满足
t
t
0
−
α
σ
(
s
)
ds
≤−
α
(
t
−
t
0
)
,其
中
α
σ
(
t
)
=
α
i
,σ
(
t
)=
i
,则称无干扰输入的系统
(3.1)
的零解是全局指数稳定的。
证明
选择如下的李雅普诺夫函数:
V
i
=
e
−
2
α
i
t
x
⊤
(
t
)
E
⊤
i
P
i
E
i
x
(
t
)
�
t
∈
[
t
k
−
1
,t
k
)
,k
∈
Z
+
,
沿着系统
(2.1)
的轨迹对李雅普诺夫函数求导,得
˙
V
i
(
t
)=
e
−
2
α
i
t
−
2
α
i
x
⊤
(
t
)
E
⊤
i
P
i
E
i
x
(
t
)+
x
⊤
(
t
)
A
⊤
i
P
i
E
i
x
(
t
)+
x
⊤
(
t
)
E
⊤
i
P
i
A
i
x
(
t
)
+
f
⊤
i
(
t,x
(
t
))
H
⊤
i
P
i
E
i
x
(
t
)+
x
⊤
(
t
)
E
⊤
i
P
i
H
i
f
i
(
t,x
(
t
))
因此,我们有:
˙
V
i
(
t
)+
α
i
V
i
(
t
)
≤
e
−
2
α
i
t
x
⊤
(
t
)
E
⊤
i
P
i
A
i
+
A
⊤
i
P
i
E
i
−
α
i
E
⊤
i
P
i
E
i
x
(
t
)
+
x
⊤
(
t
)
E
⊤
i
P
i
H
i
f
i
(
t,x
(
t
))+
f
⊤
i
(
t,x
(
t
))
H
⊤
i
P
i
E
i
x
(
t
)
≤
e
−
2
α
i
t
x
⊤
(
t
)
E
⊤
i
P
i
A
i
+
A
⊤
i
P
i
E
i
+
Q
⊤
1
Q
1
−
α
i
E
⊤
i
P
i
E
i
x
(
t
)
+
x
⊤
(
t
)
E
⊤
i
P
i
H
i
f
i
(
t,x
(
t
))
.
+
f
⊤
i
(
t,x
(
t
))
H
⊤
i
P
i
E
i
x
(
t
)
−
f
⊤
i
(
t,x
(
t
))
f
i
(
t,x
(
t
))
≤
e
−
2
α
i
t
ξ
⊤
(
t
)
E
⊤
i
P
i
A
i
+
A
⊤
i
P
i
E
i
+
Q
⊤
1
Q
1
−
α
i
E
⊤
i
P
i
E
i
E
⊤
i
P
i
H
i
H
⊤
i
P
i
E
i
−
I
ξ
(
t
)
=
e
−
2
α
i
t
ξ
⊤
(
t
)
π
i
ξ
(
t
)
这里
ξ
(
t
)=
x
⊤
(
t
)
,f
i
(
t,x
(
t
))
⊤
,π
i
=
E
⊤
i
P
i
A
i
+
A
⊤
i
P
i
E
i
+
Q
⊤
1
Q
1
−
α
i
E
⊤
i
P
i
E
i
E
⊤
i
P
i
H
i
H
⊤
i
P
i
E
i
−
I
DOI:10.12677/pm.2022.125099899
理论数学
彭思瑶
由
(4.2)
可以得到:
˙
V
(
t
)+
α
i
V
i
(
t
)
≤
0(4
.
4)
因此,我们有:
V
(
t
)
≤
exp
(
−
α
i
(
t
−
t
k
−
1
))
V
t
+
k
−
1
(4
.
5)
当
t
=
t
k
时
V
t
+
k
=
e
−
2
α
i
t
[(
I
+
ϕ
k
)
x
(
t
k
)]
T
E
T
i
P
i
E
i
(
I
+
ϕ
k
)
x
(
t
k
)
=
e
−
2
α
i
t
x
T
(
t
k
)(
I
+
ϕ
k
)
T
E
T
i
P
i
E
i
(
I
+
ϕ
k
)
x
(
t
k
)
=
e
−
2
α
i
t
E
⊤
i
P
i
E
i
1
2
(
I
+
ϕ
k
)
x
(
t
k
)
2
≤
e
−
2
α
i
t
∥
I
+
ϕ
k
∥
2
E
⊤
i
P
i
E
i
1
2
x
(
t
k
)
2
=
e
−
2
α
i
t
∥
I
+
ϕ
k
∥
2
x
T
(
t
k
)
E
T
i
P
i
E
i
x
(
t
k
)
≤
β
k
V
(
t
k
)
(4
.
6)
从
(4.5)
和
(4.6)
可以得到
V
(
t
)
≤
exp
(
−
α
i
(
t
−
t
k
−
1
))
βV
(
t
k
−
1
)
≤
β
exp
(
−
α
i
(
t
−
t
k
−
1
))
β
exp
(
−
α
i
−
1
(
t
k
−
1
−
t
k
−
2
))
V
(
t
k
−
2
)
≤
β
2
exp
(
−
α
i
(
t
−
t
k
−
1
)
−
α
i
−
1
(
t
k
−
1
−
t
k
−
2
))
V
(
t
k
−
2
)
...
≤
β
k
exp
(
−
α
i
(
t
−
t
k
−
1
)
−
α
i
−
1
(
t
k
−
1
−
t
k
−
2
)
−
...
−
α
1
(
t
1
−
t
0
))
V
(0)
(4
.
7)
因为
t
t
0
−
α
σ
(
s
)
ds
≤−
α
(
t
−
t
0
)
,我们可以得到:
V
(
t
)
≤
exp
(
−
αt
)
exp
(
N
ξ
(
t,
0)
ln
β
)
V
(0)(4
.
8)
结合
(2.3)
,我们可以得到
(
t
−
0)
T
a
−
N
0
≤
N
ξ
(
t,
0)
≤
(
t
−
0)
T
a
+
N
0
,
∀
t
≥
0(4
.
9)
首先,若
β>
1
,我们可以获得:
V
(
t
)
≤
exp
(
−
αt
)
exp
t
−
0
T
α
+
N
0
ln
β
V
(0)
=
β
N
0
exp
−
α
+
ln
β
T
α
t
V
(0)
=
β
N
0
exp
(
−
γ
0
t
)
V
(0)
(4
.
10)
其次,当
β
=1
,β
N
0
=1
,我们有
V
(
t
)
≤
1
·
exp
(
−
αt
)
V
(0)(4
.
11)
DOI:10.12677/pm.2022.125099900
理论数学
彭思瑶
最后,若
0
<β<
1
,同样地,我们会得到
V
(
t
)
≤
exp
(
−
αt
)
exp
t
−
0
T
α
−
N
0
ln
β
V
(0)
=
β
−
N
0
exp
−
α
+
ln
β
T
α
t
V
(0)
=
β
−
N
0
exp
(
−
γ
0
t
)
V
(0)
(4
.
12)
若
θ
=
max
β
N
0
,
1
,β
−
N
0
,对任意的
β>
0
,易得
V
(
t
)
≤
θexp
(
−
γ
0
t
)
V
(0)
,则无干扰输入的系
统
(3.1)
在平均脉冲间隔切换下是指数稳定的。
注
2.4
在文献
[40]
中,我们需要满足脉冲区间
t
k
−
t
k
−
1
有关上界和下界的条件,在这里我们
用到了平均脉冲区间的条件,使定理的保守性更弱。
注
2.5
在文献
[42]
中,作者研究的是线性奇异脉冲切换系统的指数稳定性问题,本文中,在
平均脉冲间隔的条件下我们得到了非线性奇异脉冲切换系统的指数稳定性问题,我们通过构造适
合的
Lyapunov
函数并采
AII
的方法,得出了基于
LMI
的充分条件以保证所研究非线性奇异脉冲
系统的指数稳定性。
注
2.6
本文中构造的
Lyapunov
函数与文献
[42]
中的函数有所不同,这里构造的
Lyapunov
函数为了更好地证明非线性奇异脉冲切换系统的指数稳定性与
L
2
增益问题。
注
2.7
与文献
[43]
相比较,此处研究的指数稳定性的方法主要是用到了文献
[42]
中平均脉冲
区间的方法,并且这里的李雅普诺夫函数也与文献
[43]
有所不同,并且定理
2.1
里面要求是存在
正定矩阵
P
满足
E
⊤
i
P
i
E
i
≥
0
。
5.
非线性奇异脉冲切换系统的
L
2
增益
我们现在研究非线性奇异切换脉冲系统的
L
2
增益条件,并且用平均脉冲区间的概念对系统
(3.1)
进行
L
2
增益分析。
定理
2.2
若切换奇异脉冲系统
(2.1)
满足假设
1
,
2
,
3
,假设存在正定矩阵
P
∈
R
n
×
n
满
足
E
⊤
i
P
i
E
i
≥
0
,
Q
1
是合适维数矩阵,常数
γ
0
>
0
,
β>
0
,
,
α,α
i
,β,γ
∈
R
那么切换奇异脉冲系统
(2.1)
在满足
(2.3)
的平均脉冲间隔下是指数稳定的,且具有
L
2
增益
γ
=
max
{
γ
1
exp
(
−
N
0
ln
β
)
,γ
1
exp
(
N
0
ln
β
)
}
,使得对
∀
i,j
∈
Q
,下面的不等式成立:
(
I
+
ϕ
k
)
⊤
E
⊤
j
P
j
E
j
(
I
+
ϕ
k
)
≤
βE
⊤
i
P
i
E
i
(5.1)
φe
−
2
α
i
t
E
⊤
i
P
i
H
i
e
−
2
α
i
t
E
⊤
i
P
i
C
i
+
D
⊤
i
F
i
e
−
2
α
i
t
H
⊤
i
P
i
E
i
−
e
−
2
α
i
t
I
0
e
−
2
α
i
t
C
⊤
i
P
i
E
i
+
F
⊤
i
D
i
0
F
⊤
i
F
i
−
γ
2
I
≤
0
(5.2)
γ
0
=
α
−
ln
β
T
α
>
0
,
(5.3)
这里
φ
=
e
−
2
α
i
t
E
⊤
i
P
i
A
i
+
e
−
2
α
i
t
A
⊤
i
P
i
E
i
+
D
⊤
i
D
i
+
e
−
2
α
i
t
Q
⊤
1
Q
1
−
e
−
2
α
i
t
α
i
E
⊤
i
P
i
E
i
,
DOI:10.12677/pm.2022.125099901
理论数学
彭思瑶
γ
1
=
λ
max
E
T
i
P
i
E
i
,α<α
i
。
证明
选择如下的李雅普诺夫函数:
V
i
=
e
−
2
α
i
t
x
⊤
(
t
)
E
⊤
i
P
i
E
i
x
(
t
)
沿着系统
(2.1)
的轨迹对
V
(
t
)
进行求导:
˙
V
(
t
)+
α
i
V
i
(
t
)
≤
e
−
2
α
i
t
x
⊤
(
t
)
E
⊤
i
P
i
A
i
+
A
⊤
i
P
i
E
i
−
α
i
E
⊤
i
P
i
E
i
x
(
t
)
+
x
⊤
(
t
)
E
⊤
i
P
i
H
i
f
i
(
t,x
(
t
))+
f
⊤
i
(
t,x
(
t
))
H
⊤
i
P
i
E
i
x
(
t
)
+
x
⊤
(
t
)
E
⊤
i
P
i
C
i
w
(
t
)+
w
⊤
(
t
)
C
⊤
i
P
i
E
i
x
(
t
)
≤
e
−
2
α
i
t
x
⊤
(
t
)
E
⊤
i
P
i
A
i
+
A
⊤
i
P
i
E
i
+
Q
⊤
1
Q
1
−
α
i
E
⊤
i
P
i
E
i
x
(
t
)
+
x
⊤
(
t
)
E
⊤
i
P
i
H
i
f
i
(
t,x
(
t
))+
f
⊤
i
(
t,x
(
t
))
H
⊤
i
P
i
E
i
x
(
t
)
−
f
⊤
i
(
t,x
(
t
))
f
i
(
t,x
(
t
))+
x
⊤
(
t
)
E
⊤
i
P
i
C
i
w
(
t
)+
w
⊤
(
t
)
C
⊤
i
P
i
E
i
x
(
t
)
结合
(5.2)
得到:
˙
V
i
(
t
)+
α
i
V
(
t
)
6
−
η
⊤
(
t
)
D
⊤
i
D
i
0
D
⊤
i
F
i
000
F
⊤
i
D
i
0
F
i
F
i
−
γ
2
I
η
(
t
)
=
γ
2
w
⊤
(
t
)
w
(
t
)
−
z
⊤
(
t
)
z
(
t
)
.
(5
.
4)
这里
η
(
t
)=
x
(
t
)
⊤
,f
⊤
i
(
t
)
,w
(
t
)
⊤
⊤
。
为了简便,令
φ
(
t
)=
∥
z
(
t
)
∥
2
−
γ
2
∥
w
(
t
)
∥
2
从
t
∈
[
t
k
−
1
,t
k
)
对式
(5.4)
进行积分,我们可以得到;
V
(
t
)
≤
exp
(
−
α
(
t
−
t
k
−
1
))
V
t
+
k
−
1
−
t
t
k
−
1
exp
(
−
α
(
t
−
s
))
φ
(
s
)
ds
。
根据
(5.4)
,并且结合不等式,我们可以获得
V
(
t
)
≤
exp
(
−
α
(
t
−
t
k
−
1
))
βV
(
t
k
−
1
)
−
t
t
k
−
1
exp
(
−
α
(
t
−
s
))
φ
(
s
)
ds
≤
exp
(
α
(
t
−
t
0
))
β
k
−
1
V
t
+
0
−
1
i
=
k
−
1
β
i
k
−
i
k
−
i
−
1
exp
(
−
α
(
t
−
s
))
φ
(
s
)
ds
−
t
t
k
−
1
exp
(
−
α
(
t
−
s
))
φ
(
s
)
ds
=
exp
(
−
α
(
t
−
t
0
)+
N
ξ
(
t,t
0
)
ln
β
)
V
t
+
0
−
t
t
0
exp
(
−
α
(
t
−
s
)+
N
ξ
(
t,s
)
ln
β
)
φ
(
s
)
ds
DOI:10.12677/pm.2022.125099902
理论数学
彭思瑶
我们在初始条件
x
t
+
0
=0
下,我们可以得到:
0
≤−
t
t
0
exp
(
−
α
(
t
−
s
)+
N
ξ
(
t,s
)
ln
β
)
φ
(
s
)
ds
(5
.
5)
即
t
t
0
exp
(
−
α
(
t
−
s
)+
N
ξ
(
t,s
)
ln
β
)
∥
z
(
s
)
∥
2
d
s
≤
γ
2
1
t
t
0
exp
(
−
α
(
t
−
s
)+
N
ξ
(
t,s
)
ln
β
)
∥
w
(
s
)
∥
2
d
s
(5
.
6)
由定义
2.1.3
,我们可以得到:
(
T
−
t
)
T
a
−
N
0
≤
N
ξ
(
T,t
)
≤
(
T
−
t
)
T
a
+
N
0
,
∀
T
≥
t
≥
0(5
.
7)
若
β
≥
1
,不等式
(5.7)
变成
t
−
s
T
a
−
N
0
ln
β
≤
N
ξ
(
t,s
)
ln
β
≤
t
−
s
T
a
+
N
0
ln
β
,这里我们假
设
α
0
=
ln
β
T
a
,然后我们得到
α
0
(
t
−
s
)
−
N
0
ln
β
≤
N
ξ
(
t,s
)
ln
β
≤
α
0
(
t
−
s
)+
N
0
ln
β.
由
(5.6)
,我
们可以获得
t
t
0
exp
[(
α
0
−
α
)(
t
−
s
)
−
N
0
ln
β
]
∥
z
(
s
)
∥
2
ds
≤
γ
2
1
t
t
0
exp
[(
α
0
−
α
)(
t
−
s
)+
N
0
ln
β
]
∥
ω
(
s
)
∥
2
ds
(5
.
8)
接下来,对
(5.8)
式从
t
0
到
+
∞
求积分,
−
1
α
0
−
α
+
∞
t
0
exp
(
−
N
0
ln
β
)
∥
z
(
s
)
∥
2
ds
≤
−
1
α
0
−
α
γ
2
1
+
∞
t
0
exp
(
N
0
ln
β
)
∥
ω
(
s
)
∥
2
ds
(5
.
9)
由
(2.7)
得
−
1
α
0
−
α
>
0
,接下来我们可以得到
+
∞
t
0
∥
z
(
s
)
∥
2
ds
≤
[
γ
1
exp
(
N
0
ln
β
)]
2
+
∞
t
0
∥
ω
(
s
)
∥
2
ds
(5
.
10)
若
0
<β<
1
,
(5.7)
变成
t
−
s
T
a
+
N
0
ln
β
≤
N
ξ
(
t,s
)
ln
β
≤
t
−
s
T
a
−
N
0
ln
β
.
然后我们可以得
到
α
0
(
t
−
s
)+
N
0
ln
β
≤
N
ξ
(
t,s
)
ln
β
≤
α
0
(
t
−
s
)
−
N
0
ln
β
由
(5.7)
得到
t
t
0
exp
[(
α
0
−
α
)(
t
−
s
)+
N
0
ln
β
]
∥
z
(
s
)
∥
2
d
s
≤
γ
2
1
t
t
0
exp
[(
α
0
−
α
)(
t
−
s
)
−
N
0
ln
β
]
∥
w
(
s
)
∥
2
d
s
(5
.
11)
类似的,对
(5.11)
从
t
0
到
+
∞
进行积分可以得到
+
∞
t
0
∥
z
(
s
)
∥
2
d
s
≤
[
γ
1
exp
(
−
N
0
ln
β
)]
2
+
∞
t
0
∥
w
(
s
)
∥
2
d
s
DOI:10.12677/pm.2022.125099903
理论数学
彭思瑶
令
γ
=
max
{
γ
1
exp
(
−
N
0
ln
β
)
,γ
1
exp
(
N
0
ln
β
)
}
,在平均脉冲间隔(
3.3
)下,对于任意的切换信
号,我们可以得到系统(
3.1
)的干扰衰减水平
γ
,定理证毕。
注
2.8
本文定理
2.2
主要研究了非线性奇异脉冲切换系统的
L
2
增益问题,并且得到了具体
的
L
2
增益的值。
6.
例子
例
1
考虑以下非线性奇异脉冲切换系统有给定的切换律和两个子系统:
E
σ
(
t
)
˙
x
(
t
)=
A
σ
(
t
)
x
(
t
)+
H
σ
(
t
)
f
σ
(
t
)
(
t,x
(
t
))
,t
̸
=
t
k
∆
x
(
t
)=
ϕ
k
x
(
t
)
,t
=
t
k
,k
=1
,
2
,...
z
(
t
)=
D
σ
(
t
)
x
(
t
)+
F
σ
(
t
)
w
(
t
)
x
t
+
0
=
x
0
(5
.
12)
这里
x
∈
R
3
,σ
:
N
→{
1
,
2
}
,
切换律设为
σ
(
t
)=
1
,t
∈
[
k
−
1
,k
)
2
,t
∈
[
k,k
+1)
E
1
=
100
010
000
,E
2
=
100
010
000
,A
1
=
1
−
10
410
100
,A
2
=
−
220
−
4
−
10
400
Figure2.
StatetrajectorydiagramwithoutimpulseinExample1
图
2.
例
1
中无脉冲的状态轨迹图
DOI:10.12677/pm.2022.125099904
理论数学
彭思瑶
f
1
(
t,x
(
t
)))=
0
.
2
sin
(
x
1
(
t
))
0
.
2
sin
(
x
2
(
t
))
0
.
2
sin
(
x
3
(
t
))
,f
2
(
t,x
(
t
))=
0
0
0
H
1
=
200
010
000
,H
2
=
200
010
000
,ϕ
k
=
−
0
.
1800
0
−
0
.
20
00
−
0
.
2
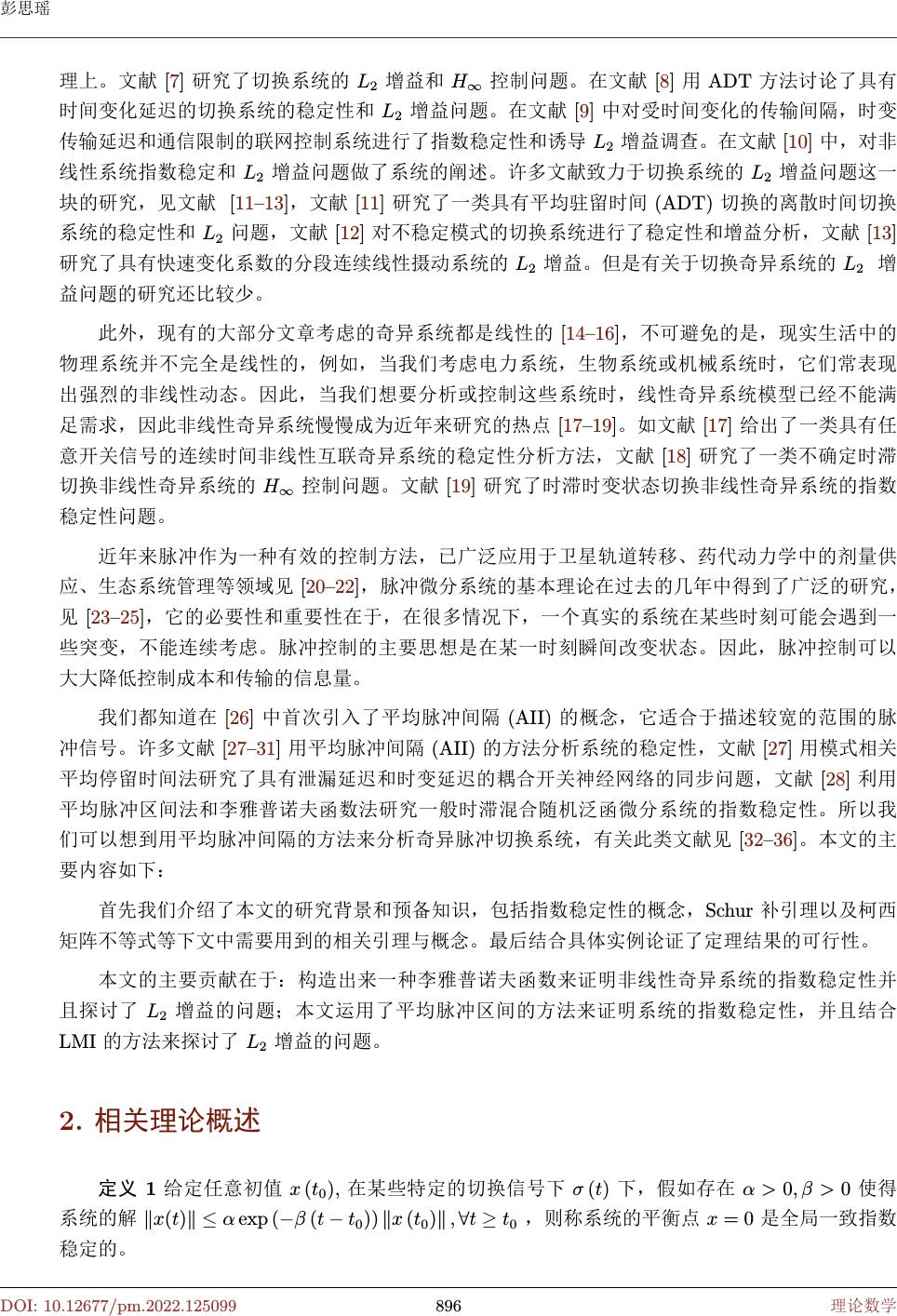
首先我们考虑无脉冲的非线性奇异切换系统,即在切换点不存在脉冲效应,此时的非线性奇
异切换系统是不稳定的,通过图
2
可以观察到系统的轨迹变化图。
这里我们选择
α
i
=0
.
9
,求解线性矩阵不等式
(4.2)
我们可以得到以下矩阵,
P
1
=
11
.
82622
.
1552
−
21
.
4997
2
.
15522
.
4065
−
1
.
9045
−
21
.
4997
−
1
.
9045480
.
3693
,E
⊤
1
P
1
E
1
=
11
.
82622
.
15520
2
.
15522
.
40650
000
;
P
2
=
0
.
0395
−
0
.
0304
−
0
.
2155
−
0
.
03040
.
52460
.
4662
−
0
.
21550
.
46622
.
1149
,E
⊤
2
P
2
E
2
=
0
.
0395
−
0
.
03040
−
0
.
03040
.
52460
000
;
Figure3.
SystemstatetrajectorydiagramforExample1
图
3.
例
1
中的状态轨迹图
DOI:10.12677/pm.2022.125099905
理论数学
彭思瑶
根据定理
1
我们可以得到
β
k
≥
[
λ
max
(
I
+
ϕ
k
)]
2
|
λ
max
(
E
⊤
j
P
j
E
j
)
|
|
λ
min
(
E
⊤
i
P
i
E
i
)
|
=0
.
179
,且
β
=0
.
82
<
1
,γ
0
=
1
.
098
>
0
,所以由定理
2.1
可知,系统
(2.1)
是指数稳定的,见图
3
,在文献
[44]
中,没有考虑到
脉冲效应,在本例中我们考虑到了脉冲效应,并且在脉冲序列
ζ
=
{
0
,
1
,
2
,
3
,
4
.....
}
下,系统
(3.1)
是指数稳定的。因为
λ
max
E
⊤
1
P
1
E
1
=11
.
3174
,λ
max
E
⊤
2
P
2
E
2
=0
.
5265
,由定理
2.2
,可以计算
出
γ
1
=
λ
max
E
⊤
i
P
i
E
i
=11
.
3174
,i,j
∈
1
,
2
,
L
2
增益为
γ
=
max
{
γ
1
exp
(
−
N
0
ln
β
)
,γ
1
exp
(
N
0
ln
β
)
}
=14
.
14675
.
例
2
进一步考虑非线性奇异脉冲切换系统
(5.12)
有以下参数:
E
1
=
100
010
000
,E
2
=
100
010
000
,A
1
=
1
−
10
410
100
,A
2
=
−
220
−
4
−
10
400
f
1
(
t,x
(
t
)))=
0
.
2
sin
(
x
1
(
t
))
0
.
2
sin
(
x
2
(
t
))
0
.
2
sin
(
x
3
(
t
))
,f
2
(
t,x
(
t
))=
0
0
0
H
1
=
200
010
000
,H
2
=
200
010
000
,ϕ
k
=
0
.
1800
00
.
20
000
.
2
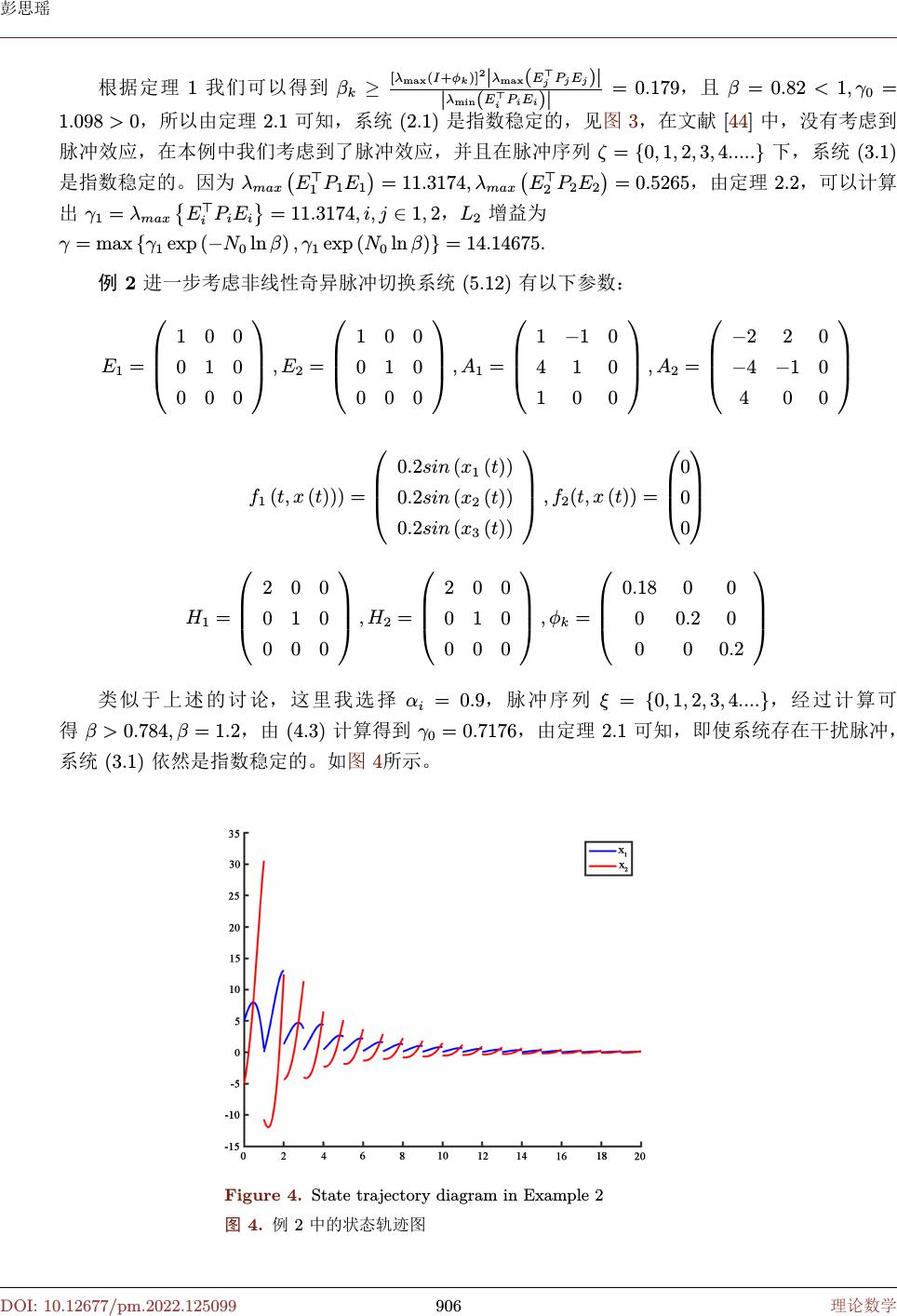
类似于上述的讨论,这里我选择
α
i
=0
.
9
,脉冲序列
ξ
=
{
0
,
1
,
2
,
3
,
4
....
}
,经过计算可
得
β>
0
.
784
,β
=1
.
2
,由
(4.3)
计算得到
γ
0
=0
.
7176
,由定理
2.1
可知,即使系统存在干扰脉冲,
系统
(3.1)
依然是指数稳定的。如图
4
所示。
Figure4.
StatetrajectorydiagraminExample2
图
4.
例
2
中的状态轨迹图
DOI:10.12677/pm.2022.125099906
理论数学
彭思瑶
7.
结论
本文主要通过平均脉冲区间的方法证明了非线性奇异系统的指数稳定性问题,并结合具体的
例子证明了定理结论的可行性,本文结合
LMI
的方法探讨了
L
2
增益的问题,本文考虑的李雅普
诺夫函数是为了更好地证明系统的指数稳定性的问题,在后面的证明过程中也发挥了作用。
致谢
本文的研究工作得到了研究生同门硕士夏子聪与魏金飞的热情的支持与帮助,在此向他们表
示真诚的谢意,没有他们的付出与帮助,我的论文研究就谈不上顺利完成,再次真心感谢和祝福
他们。
参考文献
[1]Rosenbrock,H.H.(1974)StructuralPropertiesofLinearDynamicalSystems.
International
JournalofControl
,
20
,191-202.https://doi.org/10.1080/00207177408932729
[2]Dai,L.(1989)SingularControlSystems.SpringerBerlinHeidelberg,Berlin,Heidelberg.
[3]Xia,Y.,Boukas,E.K.,Shi,P.,
etal.
(2009)StabilityandStabilizationofContinuous-Time
SingularHybridSystems.
Automatica
,
45
,1504-1509.
https://doi.org/10.1016/j.automatica.2009.02.008
[4]Li,Y.,Tong,S.,Liu,L.,
etal.
(2017)AdaptiveOutput-FeedbackControlDesignwithPre-
scribedPerformanceforSwitchedNonlinearSystems.
Automatica
,
80
,225-231.
https://doi.org/10.1016/j.automatica.2017.02.005
[5]Wu,Z.-G.,Su,H.-Y.andChu,J.(2010)RobustExponentialStabilityofUncertainSingular
MarkovianJumpTime-DelaySystems.
ActaAutomaticaSinica
,
36
,558-563.
https://doi.org/10.3724/SP.J.1004.2010.00558
[6]Kim,J.H.(2005)NewDesignMethodonMemoryless
H
∞
ControlforSingularSystemswith
DelayedStateandControlUsingLMI.
JournaloftheFranklinInstitute
,
342
,321-327.
https://doi.org/10.1016/j.jfranklin.2004.11.006
[7]Zhao,J.andHill,D.J.(2008)OnStability,
H
∞
-Gainand
H
∞
ControlforSwitchedSystems.
Automatica
,
44
,1220-1232.https://doi.org/10.1016/j.automatica.2007.10.011
[8]Sun,X.M., Zhao,J.andHill,D.J.(2006) Stabilityand
H
∞
-GainAnalysisforSwitched Delay
Systems:ADelay-DependentMethod.
Automatica
,
42
,1769-1774.
https://doi.org/10.1016/j.automatica.2006.05.007
[9]Liu,K.,Fridman,E.andHetel,L.(2012)Stabilityand
H
∞
-GainAnalysisofNetworked
ControlSystemsunderRound-RobinScheduling:ATime-DelayApproach.
SystemsControl
Letters
,
61
,666-675.https://doi.org/10.1016/j.sysconle.2012.03.002
DOI:10.12677/pm.2022.125099907
理论数学
彭思瑶
[10]Liu, Y.,Lu, J.and Wu, B.(2015)Stabilityand
H
∞
-GainPerformanceforNon-Linear Switched
ImpulsiveSystems.
IETControlTheoryApplications
,
9
,300-307.
https://doi.org/10.1049/iet-cta.2014.0015
[11]Zhang,L.andShi,P.(2009)Stability,
H
∞
-GainandAsynchronous
H
∞
ControlofDiscrete-
TimeSwitchedSystemswithAverageDwellTime.
IEEETransactionsonAutomaticControl
,
54
,2192-2199.https://doi.org/10.1109/TAC.2009.2026841
[12]Xiang,W.andXiao,J.(2012)Discussionon“Stability,
L
2
-GainandAsynchronous
H
∞
Con-
trolofDiscrete-TimeSwitchedSystemswithAverageDwellTime”.
IEEETransactionson
AutomaticControl
,
57
,3259-3261.https://doi.org/10.1109/TAC.2012.2200384
[13]Zhang,J.andFridman,E.(2022)
L
2
-GainAnalysisviaTime-DelayApproachtoPeriodic
AveragingwithStochasticExtension.
Automatica
,
137
,ArticleID:110126.
https://doi.org/10.1016/j.automatica.2021.110126
[14]Wang, Y.E.,Zhao,J.and Jiang,B.(2013)Stabilization ofa Classof Switched LinearNeutral
SystemsunderAsynchronousSwitching.
IEEETransactionsonAutomaticControl
,
58
,2114-
2119.https://doi.org/10.1109/TAC.2013.2250076
[15]Zhao,X.,Zhang,L.,Shi,P.,
etal.
(2012)Stabilityofswitchedpositivelinearsystemswith
averagedwelltimeswitching.
Automatica
,
48
,1132-1137.
https://doi.org/10.1016/j.automatica.2012.03.008
[16]Golden,R.M.andGolden,R. (1996) MathematicalMethods forNeuralNetwork Analysis and
Design.MITPress,Cambridge,MA.
[17]Zamani,I., Shafiee,M. andIbeas,A. (2015)Switched NonlinearSingular Systemswith Time-
Delay:StabilityAnalysis.
InternationalJournalofRobustandNonlinearControl
,
25
,1497-
1513.https://doi.org/10.1002/rnc.3154
[18]Zhao, Y., Yang, J. and Wen, G. (2013)
H
∞
Control for Uncertain Switched Nonlinear Singular
SystemswithTimeDelay.
NonlinearDynamics
,
74
,649-665.
https://doi.org/10.1007/s11071-013-0995-4
[19]Zamani,I.,Shafiee, M. andIbeas,A. (2013) Exponential Stability of Hybrid Switched Nonlin-
earSingular Systemswith Time-Varying Delay.
Journal of the Franklin Institute
,
350
, 171-193.
https://doi.org/10.1016/j.jfranklin.2012.10.002
[20]Prussing,J.E.,Wellnitz,L.J.andHeckathorn,W.G.(1989)OptimalImpulsiveTime-Fixed
Direct-AscentInterception.
JournalofGuidance,Control,andDynamics
,
12
,487-494.
https://doi.org/10.2514/3.20436
[21]Haddad, W.M.,Chellaboina,V.S. and Nersesov, S.G. (2014) Impulsive and Hybrid Dynamical
Systems.PrincetonUniversityPress,Princeton,NJ.
[22]Stamova, I., Stamov, T. and Li, X.(2014) Global Exponential Stability of a Class of Impulsive
CellularNeuralNetworkswithSupremums.
InternationalJournalofAdaptiveControland
SignalProcessing
,
28
,1227-1239.https://doi.org/10.1002/acs.2440
DOI:10.12677/pm.2022.125099908
理论数学
彭思瑶
[23]Li,X.andWu,J.(2016)StabilityofNonlinearDifferentialSystemswithState-Dependent
DelayedImpulses.
Automatica
,
64
,63-69.https://doi.org/10.1016/j.automatica.2015.10.002
[24]Bainov,D.andSimeonov,P.(1993)ImpulsiveDifferentialEquations:PeriodicSolutionsand
Applications.CRCPress,BocaRaton,FL.
[25]Chandrasekar,A.,Rakkiyappan,R.andCao,J.(2015)ImpulsiveSynchronizationofMarko-
vianJumpingRandomlyCoupledNeuralNetworkswithPartlyUnknownTransitionProba-
bilitiesviaMultipleIntegralApproach.
NeuralNetworks
,
70
,27-38.
https://doi.org/10.1016/j.neunet.2015.07.002
[26]Lu,J.,Ho,D.W.C.andCao,J.(2010)AUnifiedSynchronizationCriterionforImpulsive
DynamicalNetworks.
Automatica
,
46
,1215-1221.
https://doi.org/10.1016/j.automatica.2010.04.005
[27]Xie,X.,Liu,X.andXu,H.(2019)SynchronizationofDelayedCoupledSwitchedNeural
Networks:Mode-DependentAverageImpulsiveInterval.
Neurocomputing
,
365
,261-272.
https://doi.org/10.1016/j.neucom.2019.07.045
[28]Li,D.,Cheng,P.andHe,S.(2017)ExponentialStabilityofHybridStochasticFunctional
DifferentialSystemswithDelayedImpulsiveEffects:AverageImpulsiveIntervalApproach.
MathematicalMethodsintheAppliedSciences
,
40
,4197-4210.
https://doi.org/10.1002/mma.4297
[29]Yao,F.,Cao,J.,Qiu,L.,
etal.
(2017)ExponentialStabilityAnalysisforStochasticDelayed
DifferentialSystems withImpulsiveEffects:AverageImpulsiveIntervalApproach.
Asian Jour-
nalofControl
,
19
,74-86.https://doi.org/10.1002/asjc.1320
[30]Rakkiyappan, R.,Gayathri,D.,Velmurugan,G.,
etal.
(2019)Exponential Synchronizationof
Inertial Memristor-BasedNeural Networkswith TimeDelay UsingAverageImpulsiveInterval
Approach.
NeuralProcessingLetters
,
50
,2053-2071.
https://doi.org/10.1007/s11063-019-09982-y
[31]Li,Y.(2017) Impulsive Synchronization of Stochastic Neural Networks via Controlling Partial
States.
NeuralProcessingLetters
,
46
,59-69.https://doi.org/10.1007/s11063-016-9568-0
[32]Yu, Q. and Li,Y.(2021) Stabilizationand Control of Switched Singular Systems with Impulse
underaNewAverageDwellTimeStrategy.
AsianJournalofControl
.
https://doi.org/10.1002/asjc.2671
[33]Wang,Y.,Zou,Y.,Liu,Y.,
etal.
(2015)AverageDwell TimeApproach toFinite-TimeStabi-
lizationof Switched SingularLinear Systems.
Journal ofthe Franklin Institute
,
352
, 2920-2933.
https://doi.org/10.1016/j.jfranklin.2015.05.022
[34]Xiong,W.,Zhang,D.andCao,J.(2017)ImpulsiveSynchronisationofSingularHybridCou-
pledNetworkswithTime-VaryingNonlinearPerturbation.
InternationalJournalofSystems
Science
,
48
,417-424.https://doi.org/10.1080/00207721.2016.1186241
DOI:10.12677/pm.2022.125099909
理论数学
彭思瑶
[35]Zhan,T.,Ma,S.andChen,H.(2019)ImpulsiveStabilizationofNonlinearSingularSwitched
SystemswithAllUnstable-ModeSubsystems.
AppliedMathematicsandComputation
,
344
,
57-67.https://doi.org/10.1016/j.amc.2018.10.009
[36]Feng, N., Wu, B., Liu, L.,
et al.
(2020) Exponential Stability of Output-Based Event-Triggered
ControlforSwitchedSingularSystems.
AsianJournalofControl
,
22
,1513-1521.
https://doi.org/10.1002/asjc.2035
[37]Tang, Z., Park, J.H. and Feng, J. (2017)Impulsive Effects on Quasi-Synchronization of Neural
Networks with Parameter Mismatches and Time-Varying Delay.
IEEETransactionson Neural
NetworksandLearningSystems
,
29
,908-919.https://doi.org/10.1109/TNNLS.2017.2651024
[38]Dong,Y.,Li,T.andMei,S.(2016)ExponentialStabilizationandL2-GainforUncertain
SwitchedNonlinearSystemswithIntervalTime-VaryingDelay.
MathematicalMethodsinthe
AppliedSciences
,
39
,3836-3854.https://doi.org/10.1002/mma.3828
[39]Xu,S. andLam,J.(2006)Robust Control and Filteringof SingularSystems.Springer,Berlin.
[40]Zhai,G.,Hu,B.,Yasuda,K.,
etal.
(2001)DisturbanceAttenuationPropertiesofTime-
ControlledSwitchedSystems.
JournaloftheFranklinInstitute
,
338
,765-779.
https://doi.org/10.1016/S0016-0032(01)00030-8
[41]Zhou,L.,Ho,D.W.C.andZhai,G.(2013)StabilityAnalysisofSwitchedLinearSingular
Systems.
Automatica
,
49
,1481-1487.https://doi.org/10.1016/j.automatica.2013.02.002
[42]Tao, W.,Liu, Y. andLu, J.(2017) Stabilityand
L
2
-GainAnalysis forSwitchedSingular Linear
SystemswithJumps.
MathematicalMethodsintheAppliedSciences
,
40
,589-599.
https://doi.org/10.1002/mma.3996
[43]
杨冬梅
,
李祉含
.
广义非线性脉冲切换系统的指数稳定和
L
2
增益控制
[J].
东北大学学报
(
自然
科学版
),2021,42(6):908-912.
[44]Dong,Y.,Li,T.andMei,S.(2016)ExponentialStabilizationand
L
2
-GainforUncertain
SwitchedNonlinearSystemswithIntervalTime-VaryingDelay.
MathematicalMethodsinthe
AppliedSciences
,
39
,3836-3854.https://doi.org/10.1002/mma.3828
DOI:10.12677/pm.2022.125099910
理论数学