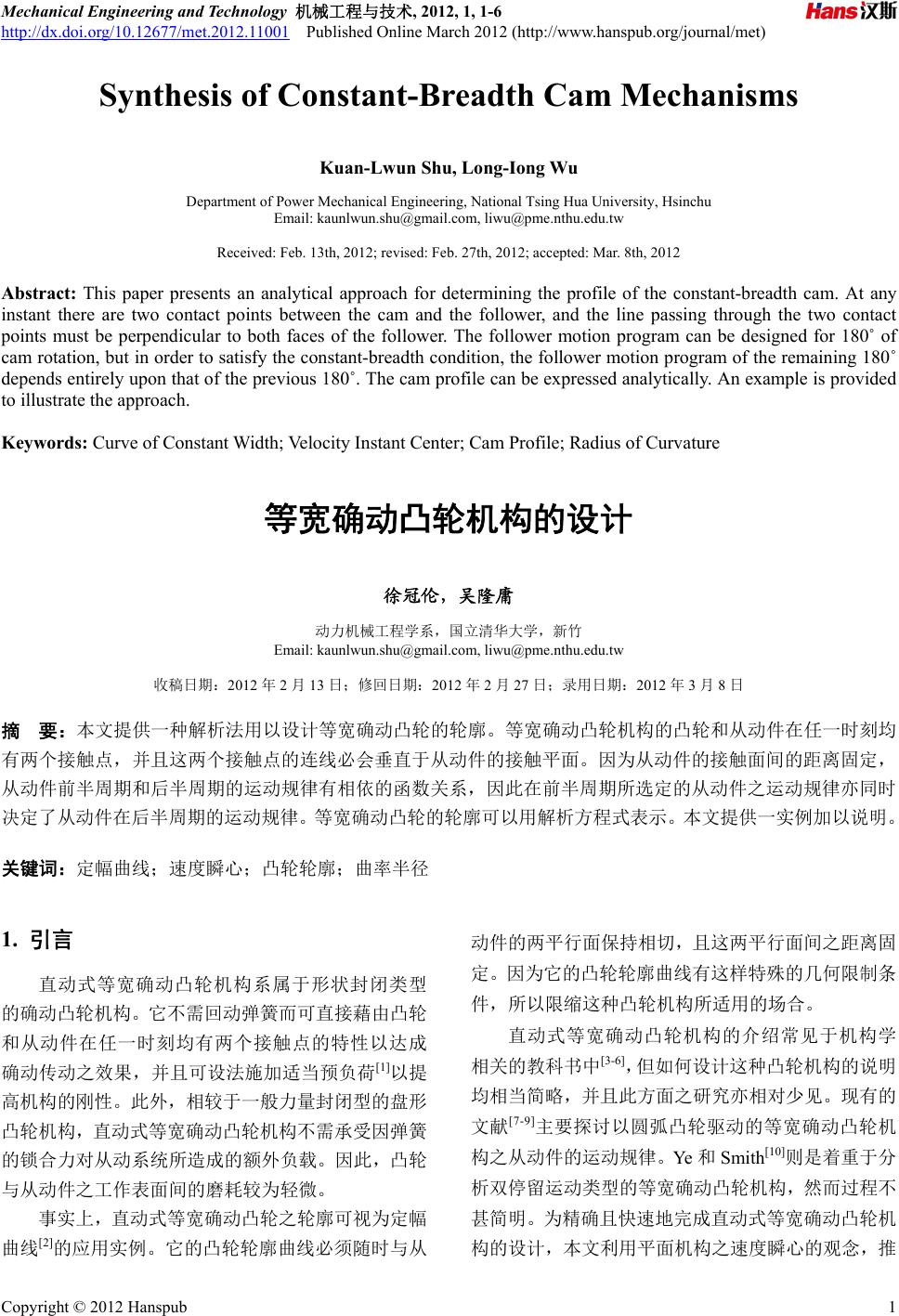
 Mechanical Engineering and Technology 机械工程与技术, 2012, 1, 1-6 http://dx.doi.org/10.12677/met.2012.11001 Published Online March 2012 (http://www.hanspub.org/journal/met) Synthesis of Constant-Breadth Cam Mechanisms Kuan-Lwun Shu, Long-Iong Wu Department of Power Mechanical Engineering, National Tsing Hua University, Hsinchu Email: kaunlwun.shu@gmail.com, liwu@pme.nthu.edu.tw Received: Feb. 13th, 2012; revised: Feb. 27th, 2012; accepted: Mar. 8th, 2012 Abstract: This paper presents an analytical approach for determining the profile of the constant-breadth cam. At any instant there are two contact points between the cam and the follower, and the line passing through the two contact points must be perpendicular to both faces of the follower. The follower motion program can be designed for 180˚ of cam rotation, but in order to satisfy the constant-breadth condition, the follower motion program of the remaining 180˚ depends entirely upon that of the previous 180˚. The cam profile can be expressed analytically. An example is provided to illustrate the approach. Keywords: Curve of Constant Width; Velocity Instant Center; Cam Profile; Radius of Curvature 等宽确动凸轮机构的设计 徐冠伦,吴隆庸 动力机械工程学系,国立清华大学,新竹 Email: kaunlwun.shu@gmail.com, liwu@pme.nthu.edu.tw 收稿日期:2012 年2月13 日;修回日期:2012 年2月27 日;录用日期:2012 年3月8日 摘 要:本文提供一种解析法用以设计等宽确动凸轮的轮廓。等宽确动凸轮机构的凸轮和从动件在任一时刻均 有两个接触点,并且这两个接触点的连线必会垂直于从动件的接触平面。因为从动件的接触面间的距离固定, 从动件前半周期和后半周期的运动规律有相依的函数关系,因此在前半周期所选定的从动件之运动规律亦同时 决定了从动件在后半周期的运动规律。等宽确动凸轮的轮廓可以用解析方程式表示。本文提供一实例加以说明。 关键词:定幅曲线;速度瞬心;凸轮轮廓;曲率半径 1. 引言 直动式等宽确动凸轮机构系属于形状封闭类型 的确动凸轮机构。它不需回动弹簧而可直接藉由凸轮 和从动件在任一时刻均有两个接触点的特性以达成 确动传动之效果,并且可设法施加适当预负荷[1]以提 高机构的刚性。此外,相较于一般力量封闭型的盘形 凸轮机构,直动式等宽确动凸轮机构不需承受因弹簧 的锁合力对从动系统所造成的额外负载。因此,凸轮 与从动件之工作表面间的磨耗较为轻微。 事实上,直动式等宽确动凸轮之轮廓可视为定幅 曲线[2]的应用实例。它的凸轮轮廓曲线必须随时与从 动件的两平行面保持相切,且这两平行面间之距离固 定。因为它的凸轮轮廓曲线有这样特殊的几何限制条 件,所以限缩这种凸轮机构所适用的场合。 直动式等宽确动凸轮机构的介绍常见于机构学 相关的教科书中[3-6],但如何设计这种凸轮机构的说明 均相当简略,并且此方面之研究亦相对少见。现有的 文献[7-9]主要探讨以圆弧凸轮驱动的等宽确动凸轮机 构之从动件的运动规律。Ye 和Smith[10]则是着重于分 析双停留运动类型的等宽确动凸轮机构,然而过程不 甚简明。为精确且快速地完成直动式等宽确动凸轮机 构的设计,本文利用平面机构之速度瞬心的观念,推 Copyright © 2012 Hanspub 1 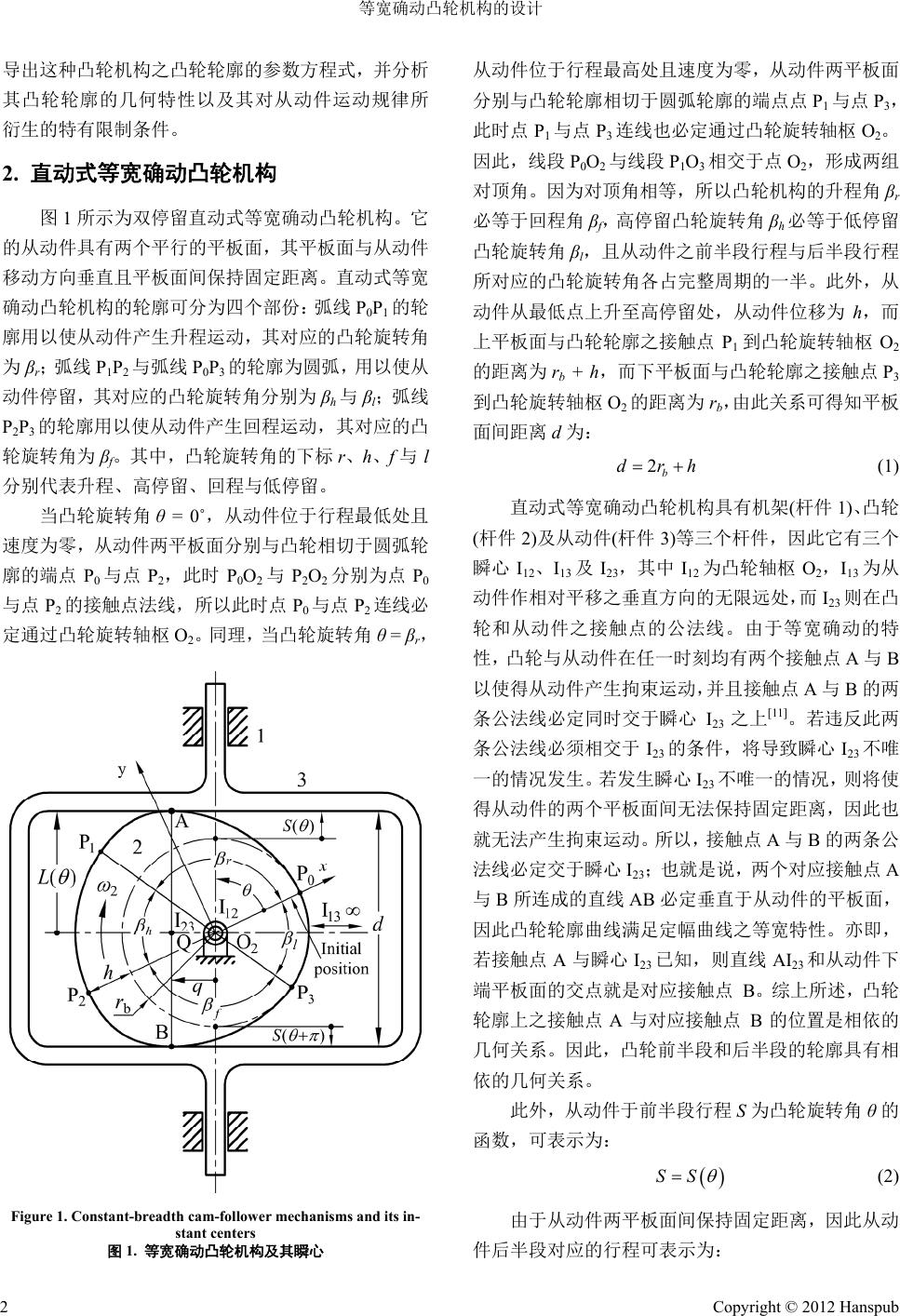 等宽确动凸轮机构的设计 导出这种凸轮机构之凸轮轮廓的参数方程式,并分析 其凸轮轮廓的几何特性以及其对从动件运动规律所 衍生的特有限制条件。 2. 直动式等宽确动凸轮机构 图1所示为双停留直动式等宽确动凸轮机构。它 的从动件具有两个平行的平板面,其平板面与从动件 移动方向垂直且平板面间保持固定距离。直动式等宽 确动凸轮机构的轮廓可分为四个部份:弧线 P0P1的轮 廓用以使从动件产生升程运动,其对应的凸轮旋转角 为βr;弧 线P1P2与弧线 P0P3的轮廓为圆弧,用以使从 动件停留,其对应的凸轮旋转角分别为βh与βl;弧 线 P2P3的轮廓用以使从动件产生回程运动,其对应的凸 轮旋转角为βf。其中,凸轮旋转角的下标 r、h、f与 l 分别代表升程、高停留、回程与低停留。 当凸轮旋转角θ = 0˚,从动件位于行程最低处且 速度为零,从动件两平板面分别与凸轮相切于圆弧轮 廓的端点 P0与点 P2,此时 P0O2与P2O2分别为点 P0 与点 P2的接触点法线,所以此时点 P0与点 P2连线必 定通过凸轮旋转轴枢 O2。同理,当凸轮旋转角θ = βr, Figure 1. Constant-breadth cam-follower mechanisms and its in- stant centers 图1. 等宽确动凸轮机构及其瞬心 从动件位于行程最高处且速度为零,从动件两平板面 分别与凸轮轮廓相切于圆弧轮廓的端点点 P1与点 P3, 此时点 P1与点 P3连线也必定通过凸轮旋转轴枢 O2。 因此,线段 P0O2与线段P1O3相交于点 O2,形成两组 对顶角。因为对顶角相等,所以凸轮机构的升程角βr 必等于回程角βf,高停留凸轮旋转角βh必等于低停留 凸轮旋转角βl,且从动件之前半段行程与后半段行程 所对应的凸轮旋转角各占完整周期的一半。此外,从 动件从最低点上升至高停留处,从动件位移为 h,而 上平板面与凸轮轮廓之接触点 P1到凸轮旋转轴枢 O2 的距离为rb + h,而下平板面与凸轮轮廓之接触点 P3 到凸轮旋转轴枢O2的距离为 rb,由此关系可得知平板 面间距离 d为: 2 b drh (1) 直动式等宽确动凸轮机构具有机架(杆件 1)、凸轮 (杆件 2)及从动件(杆件 3)等三个杆件,因此它有三个 瞬心 I12、I13 及I23,其中 I12 为凸轮轴枢 O2,I13 为从 动件作相对平移之垂直方向的无限远处,而 I23 则在凸 轮和从动件之接触点的公法线。由于等宽确动的特 性,凸轮与从动件在任一时刻均有两个接触点 A与B 以使得从动件产生拘束运动,并且接触点 A与B的两 条公法线必定同时交于瞬心 I23 之上[11]。若违反此两 条公法线必须相交于 I23的条件,将导致瞬心I23 不唯 一的情况发生。若发生瞬心 I23 不唯一的情况,则将使 得从动件的两个平板面间无法保持固定距离,因此也 就无法产生拘束运动。所以,接触点 A与B的两条公 法线必定交于瞬心 I23;也就是说,两个对应接触点 A 与B所连成的直线 AB 必定垂直于从动件的平板面, 因此凸轮轮廓曲线满足定幅曲线之等宽特性。亦即, 若接触点A与瞬心 I23 已知,则直线 AI23 和从动件下 端平板面的交点就是对应接触点 B。综上所述,凸轮 轮廓上之接触点A与对应接触点 B的位置是相依的 几何关系。因此,凸轮前半段和后半段的轮廓具有相 依的几何关系。 此外,从动件于前半段行程 S为凸轮旋转角θ的 函数,可表示为: SS (2) 由于从动件两平板面间保持固定距离,因此从动 件后半段对应的行程可表示为: Copyright © 2012 Hanspub 2 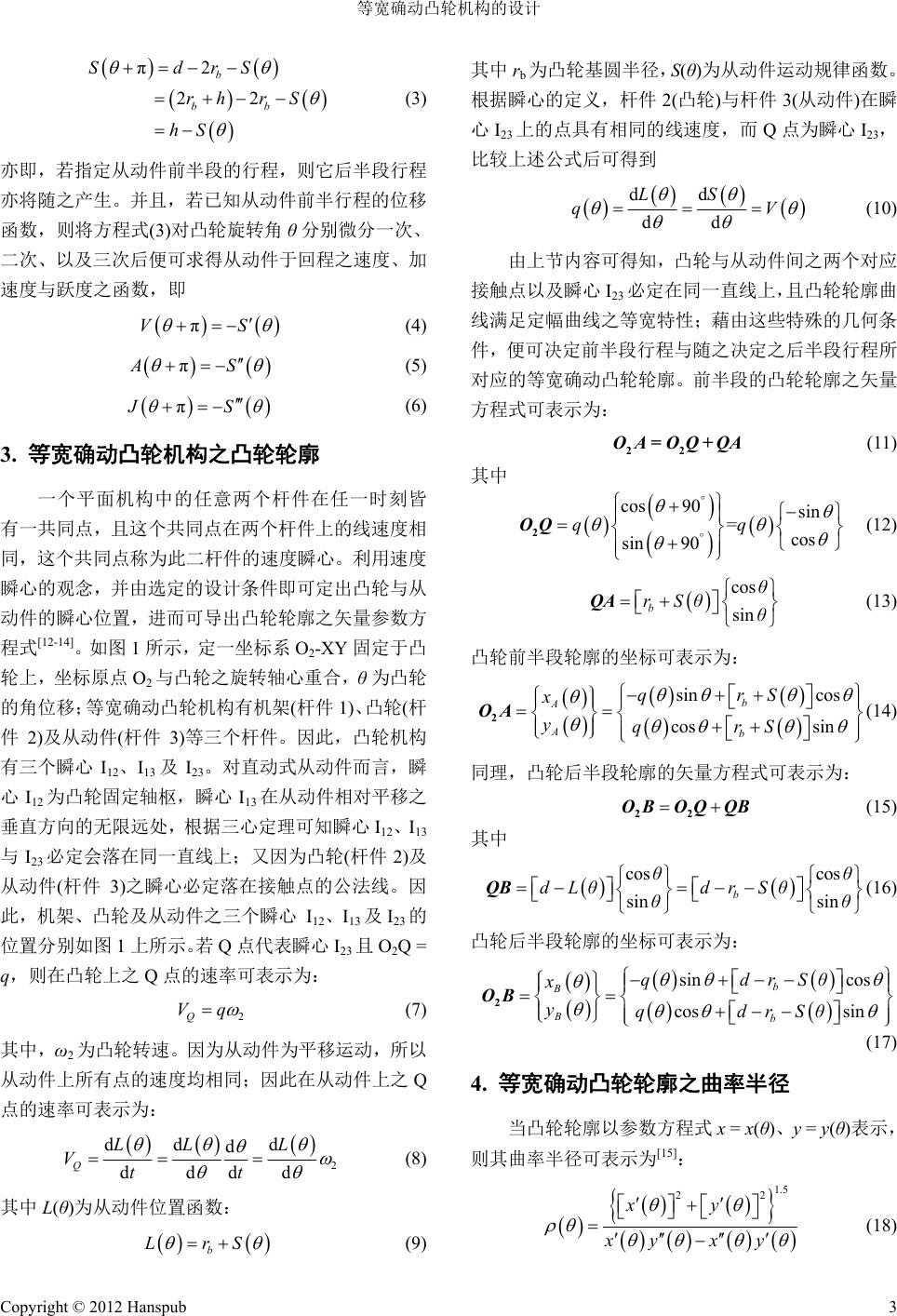 等宽确动凸轮机构的设计 π2 22 b bb SdrS rh rS hS (3) 亦即,若指定从动件前半段的行程,则它后半段行程 亦将随之产生。并且,若已知从动件前半行程的位移 函数,则将方程式(3)对凸轮旋转角θ分别微分一次、 二次、以及三次后便可求得从动件于回程之速度、加 速度与跃度之函数,即 πVS (4) π AS (5) π JS (6) 3. 等宽确动凸轮机构之凸轮轮廓 一个平面机构中的任意两个杆件在任一时刻皆 有一共同点,且这个共同点在两个杆件上的线速度相 同,这个共同点称为此二杆件的速度瞬心。利用速度 瞬心的观念,并由选定的设计条件即可定出凸轮与从 动件的瞬心位置,进而可导出凸轮轮廓之矢量参数方 程式[12-14]。如图1所示,定一坐标系 O2-XY固定于凸 轮上,坐标原点 O2与凸轮之旋转轴心重合,θ为凸轮 的角位移;等宽确动凸轮机构有机架(杆件 1)、凸轮(杆 件2)及从动件(杆件 3)等三个杆件。因此,凸轮机构 有三个瞬心 I12、I13 及I23。对直动式从动件而言,瞬 心I12 为凸轮固定轴枢,瞬心 I13 在从动件相对平移之 垂直方向的无限远处,根据三心定理可知瞬心 I12、I13 与I23 必定会落在同一直线上;又因为凸轮(杆件2)及 从动件(杆件3)之瞬心必定落在接触点的公法线。因 此,机架、凸轮及从动件之三个瞬心 I 12、I13 及I23 的 位置分别如图 1上所示。若Q点代表瞬心 I23 且O2Q = q,则在凸轮上之 Q点的速率可表示为: 2 Q Vq (7) 其中,ω2为凸轮转速。因为从动件为平移运动,所以 从动件上所有点的速度均相同;因此在从动件上之Q 点的速率可表示为: 2 dd d d dddd Q LL L Vtt (8) 其中 L(θ)为从动件位置函数: b LrS (9) 其中 rb为凸轮基圆半径,S(θ)为从动件运动规律函数。 根据瞬心的定义,杆件 2(凸轮)与杆件 3(从动件)在瞬 心I23 上的点具有相同的线速度,而Q点为瞬心I23, 比较上述公式后可得到 dd dd LS qV (10) 由上节内容可得知,凸轮与从动件间之两个对应 接触点以及瞬心I23 必定在同一直线上,且凸轮轮廓曲 线满足定幅曲线之等宽特性;藉由这些特殊的几何条 件,便可决定前半段行程与随之决定之后半段行程所 对应的等宽确动凸轮轮廓。前半段的凸轮轮廓之矢量 方程式可表示为: 22 =+OAOQQA (11) 其中 cos 90sin =cos sin 90 2 OQ qq (12) cos sin QA b θ rSθθ (13) 凸轮前半段轮廓的坐标可表示为: sin cos cos sin 2 OA b A Ab qrS x yqrS (14) 同理,凸轮后半段轮廓的矢量方程式可表示为: 22 OBOQQB (15) 其中 cos cos sin sin QB b θθ dLθdr Sθ θθ (16) 凸轮后半段轮廓的坐标可表示为: sin cos cos sin 2 OB b B Bb qdrSθ x yqdrSθ (17) 4. 等宽确动凸轮轮廓之曲率半径 当凸轮轮廓以参数方程式x = x(θ)、y = y(θ)表示, 则其曲率半径可表示为[15]: 1.5 22 xy xyx y (18) Copyright © 2012 Hanspub 3  等宽确动凸轮机构的设计 其中,x'及x"分别表示 x对θ的一次及二次微分,y' 及y"分别表示 y对θ的一次及二次微分。将推导出的 凸轮轮廓矢量参数方程式(14)代入方程式(18)中,即可 计算等宽确动凸轮前半段轮廓的曲率半径: 1.5 22 AA A AA AA xy x yxy (19) 其中, sin sin A xA L (20) cos cos A yA L (21) sin cos sincos A xJ A VL (22) cos sin cossin A yJA VL (23) 其中,V(θ)、A(θ)、以及 J(θ)分为 S(θ)对θ的一阶、二 阶、以及三阶导函数。经过代数运算,等宽确动凸轮 前半段轮廓的曲率半径 A 可以表示为: AAL (24) 同理,等宽确动凸轮后半段轮廓的曲率半径 B 可表示 为: 1.5 22 BB B B BBB xy x yxy (25) 其中, sinsin sin B xA L d (26) coscos cos B yA Ld (27) sin cos sincoscos B xJ A VLd (28) cos sin cossinsin B yJ A VLd (29) 经过代数运算,等宽确动凸轮后半段轮廓的曲率半径 B 可以表示为: BdA L (30) 由(24)、(30)两式可发现 AB d (31) 也就是: πd (32) 由以上推导可知,对于直动式等宽确动凸轮而言,凸 轮前半段轮廓与后半段轮廓的曲率半径间存在着 π d 的关系。因此,计算等宽确动凸 轮轮廓的曲率半径时,只要知道前半段轮廓的曲率半 径,便可透过方程式(32)计算出对应后半段轮廓的曲 率半径。 5. 范例 本设计方法的应用将以底下的范例进行说明。 当凸轮的角位移为 0˚~120˚时,从动件以修正正弦 运动曲线上升 20 mm;当凸轮的角位移为 120˚~180˚ 时,从动件停留。当给定前半段的位移函数后,便可 利用(3)式推导出后半段行程的位移方程式。图2为从 动件之运动规律,其中后半段行程的速度、加速度与 跃度函数可分别利用方程式(4)、(5)与(6)求得,不需另 外推导。凸轮的基圆半径rb为40 mm,故平板面间距 离d应设定为100 mm。图3所示为利用(14)与(17)式 所计算出的凸轮轮廓;由于前半段与后半段行程所对 应的轮廓曲线可同时求得,故仅需计算方程式在 0 ≤ θ ≤ 180˚所对应的数值即可。图4所示为凸轮轮廓的曲率 半径,其中前半行程之曲率半径 A 系利用(19)式计算 而得,而后半行程的曲率半径 B 为利用平板面间距离 d减去所对应的前半行程之曲率半径 A 而得。 (a) 从动件之位移函数 (b) 从动件之速度函数 Copyright © 2012 Hanspub 4  等宽确动凸轮机构的设计 (c) 从动件之加速度函数 (d) 从动件之跃度函数 Figure 2. Motion of the follower 图2. 从动件之运动规律 Figure 3. Profile of constant-b readth cam 图3. 等宽凸轮机构之轮廓 Figure 4. Radius of curvatures of constant-breadth cam 图4. 等宽凸轮轮廓之曲率半径 6. 结论 本文针对等宽确动凸轮机构所具有的特殊的几 何尺寸限 参考文献 ord: Ox- th from a linear viewpoint. utlines of a theory m design and manufacture, 2nd Edition. New New York: Mac-Graw 机构设计[M]. 上海: 上海科学技术出 jaram. Kinematic analysis of constant- 构的数学建模与动态仿真[J]. Jordi. Analysis and synthesis of Smith. Synthesis of constant-breadth cam mecha- gn profiles quickly. Machine De- . 台北: 台湾东华书局股份有限 onjugate cam profile by vector equation. 制与运动规律进行说明,并利用速度瞬心的 观念推导出等宽确动凸轮机构之凸轮轮廓的参数方 程式。由于等宽确动凸轮机构的凸轮和从动件在任一 时刻均有两个接触点,并且这两个对应接触点的连线 恒垂直于从动件的接触平面,因此,等宽确动凸轮机 构具有特殊的几何尺寸限制,其中包含:从动件两接 触平面之间的距离减去基圆直径必等于从动件升程; 从动件在高停留区间所对应之凸轮旋转角的幅度值 必须等于在低停留区间所对应之凸轮旋转角的幅度 值。而从动件前半周期和后半周期的运动规律同样具 有特殊的函数关系:当选定凸轮旋转角在 0 ≤ θ ≤ 180˚ 区间时的从动件之运动规律后,也就同时决定了从动 件在凸轮旋转角为 180˚ ≤ θ ≤ 360˚区间时的运动规律。 综上所述,本文所提供的结果,可帮助设计者迅速与 确实地完成等宽确动凸轮机构的设计。 (References) [1] H. Nakazawa. Principle of precision engineering. Oxf ford University Press, 1994: 96-98. [2] J. C. Fisher. Curves of constant wid Mathematics Magazine, 1987, 6(3): 131-140. [3] F. Reuleaux. The kinematics of machinery: O of machines. London: Macmillan, 1875, Reprinted 1963: 139- 146. [4] P. W. Jenson. Ca York: Marcel Dekker, 1987: 134-137. [5] H. A. Rothbart. Cam design handbook. Hill, 2004: 477-479. [6] 石永刚, 徐振华. 凸轮 版社, 1995: 161-167. [7] S. G. Dhande, N. Ra breadth cam-follower mechanisms. Transactions of the ASME, Journal of Mechanisms, Transmissions, and Automation in De- sign, 1984, 106(3): 214-221. [8] 徐起贺, 王文深. 等宽凸轮机 机械传动, 2002, 2: 24-25, 75. [9] E. E. Zayas, S. Cardona and L. the displacement function of the follower in constant-breadth cam mechanisms. Mechanism and Machine Theory, 2009, 44: 1938-1949. [10] Z. Ye, M. R. nisms. Mechanism and Machine Theory, 2002, 37(9): 941-953. [11] K. Brunell. Constant diameter cams, their properties and desi characteristics. Transactions of the ASME, Journal of Engineer- ing for Industry, 1962: 161-164. [12] J. K. Davidson. Calculating cam sign, 1978, 50(28): 151-155. [13] 颜鸿森, 吴隆庸. 机构学[M] 公司, 2006: 268-285. [14] L. I. Wu. Calculating c Copyright © 2012 Hanspub 5  等宽确动凸轮机构的设计 Copyright © 2012 Hanspub 6 ms for industry. London: Mechanical Engineering Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2003, 217(10): 1117-1123. [15] J. Reeve. Ca Publications Limited, 1995: 90-98. |