设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投稿
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
AdvancesinAppliedMathematics
A^
ê
Æ
?
Ð
,2022,11(7),4323-4334
PublishedOnlineJuly2022inHans.http://www.hanspub.org/journal/aam
https://doi.org/10.12677/aam.2022.117459
ä
k
Ó
Ü
Š
*
Ñ
+
Ó
.
¾¾¾
ÿÿÿ
§§§
ŠŠŠ
###
lll
∗
=
²
n
ó
Œ
Æ
,
n
Æ
§
A^
ê
Æ
X
,
[
‹
=
²
Â
v
F
Ï
µ
2022
c
6
6
F
¶
¹
^
F
Ï
µ
2022
c
7
1
F
¶
u
Ù
F
Ï
µ
2022
c
7
8
F
Á
‡
)
Ô
«
+
m
'
X
•
)
p¨
)
!
M
)
!
¿
Ú
Ó
o
«
Ä
'
X
§
Ù
¥
Ó
'
X
3
)
Ô
.
¥
´
7
Ø
Œ
"
"
Ó
ö
†
ƒ
m
Ð
y
Ñ
J
Ó
†
<
;
y–
§
ù
‡
N
Ø
¬
•
Ï
½
3
,
˜
«
•
§
´
Š
X
k
|
u
g
¤•
/
•
£
Ä
§
d
ž
«
+
¥
•
3
*
Ñ
y–
"
Ï
d
§
Ä
u
õ
«
Ï
ƒ
K
•
§
©
ï
á
˜
‡
ä
k
Ó
ö
ö
Ü
Š
*
Ñ
+
Ó
.
"
Ä
k
§
3
.
Ø
•
Ä
*
Ñ
e
§
?
Ø
¤
k
²
ï
:
•
3
5
Ú
-
½
5
"
Ù
g
§
Ï
L
n
Ø
*
Ñ
¬
—
.
Ø
-
½
"
•
§
Ï
L
ê
Š
[
y
þ
ã
©
Û
(
J
"
'
…
c
*
Ñ
§
+
§
ö
Ü
Š
DynamicBehaviorsofanDiffusion
IntraguildPredationModelwith
HuntingCooperation
YanFeng,XinyouMeng
∗
AppliedMathematicsDepartment,SchoolofScience,LanzhouUniversityofTechnology,Lanzhou
Gansu
Received:Jun.6
th
,2021;accepted:Jul.1
st
,2022;published:Jul.8
th
,2022
∗
Ï
Õ
Š
ö
"
©
Ù
Ú
^
:
¾
ÿ
,
Š
#
l
.
ä
k
Ó
Ü
Š
*
Ñ
+
Ó
.
[J].
A^
ê
Æ
?
Ð
,2022,11(7):4323-4334.
DOI:10.12677/aam.2022.117459
¾
ÿ
§
Š
#
l
Abstract
Therelationshipsamongspeciesincludemutualism,parasitism,competitionandpre-
dation,amongwhichpredationisindispensableinthebiologicalworld.Inthisway,
individualswillnotbefixedinacertainareaforalongtime,butmovetoaplace
conducive to their own growth.At this time, there is aphenomenon of diffusion in the
population.Therefore,basedontheinfluenceofmanyfactors,adiffusionintraguild
predationmodelwithhuntingcooperationisestablishedinthispaper.Firstly,the
existenceandstabilityofallequilibriumpointsarediscussedwithoutconsideringd-
iffusion.Secondly,wegetthetheorythatdiffusionwillleadtotheinstabilityofthe
model.Finally,theresultsareverifiedbynumericalsimulation.
Keywords
Diffusion,Intraguild,HuntingCooperation
Copyright
c
2022byauthor(s)andHansPublishersInc.
This work is licensed undertheCreative Commons Attribution InternationalLicense(CCBY4.0).
http://creativecommons.org/licenses/by/4.0/
1.
Ú
ó
)
Ô
)
•
†
„
û
†
‚
¸
ƒ
m
'
X
—
Ø
Œ
©
.
˜
•
¡
,
)
Ô
)
·
¹
Ä
Ï
L
¤
?
‚
¸
Ô
Ÿ
!
U
þ
!
&
E
Ú
Ñ
E
¤
,
l
6
±
)
•
;
,
˜
•
¡
,
)
Ô
)
•
G
q
žž
••
/
K
•
X
‚
¸
•
3
G
¹
†
u
Ð
C
z
.1920
c
“
, Lotka[1]
Ú
Volterra[2]
ü
Æ
ö
J
Ñ
²
;
Ó
ö
-
.
.
•
d
,
Ó
ö
†
ƒ
m
ƒ
p
Š
^
¤
•
ê
Æ
.
Ú
)
Ô
Æ
+
•
˜
‡
-
‡
‘
K
.
‘
X
Ó
ö
-
.
3
«
+
)
Æ
¥
2
•
A^
,
N
õ
Æ
ö3
²
;
Ó
ö
-
.
Ä
:
þ
‰
Ñ
N
õ
ï
Ä
¤
J
[3–6].
Ó
ö
-
.
Ä
å
Æ1
•
3
)
Ô
.
¥
®
²
¤
•
˜
‡
é
-
‡
ï
Ä
•
•
.
3
)
X
Ú
¥
,
ü
‡
«
+
ƒ
m
'
X
Œ
U
Q
´
Ó
'
X
q
´
¿
'
X
[7,8].
•
d
,
)
Æ
[
Polis,Myers
Ú
Holt[9]
Ä
g
J
Ñ
+
Ó
(IGP)
.
V
g
.
T
.
£
ã
ü
‡
Ô
«
ƒ
p
¿
˜
«
]
Ó
ž
q
´
Ó
'
X
,
•
{
ü
/
ª´
d
n
‡
Ô
«
|
¤
:
•
]
!
+
S
Ú
+
S
Ó
ö
.
+
S
•
±
•
]
•
,
+
S
Ó
ö
±
+
S
Ú
•
]
•
.Holt
Ú
Polis[10]
Ä
g
3
ê
Æ
.
¥
£
ã
+
Ó
.
V
g
,
T
./
ª
X
e
:
d
R
d
t
=
R
(
ϕ
(
R
)
−
ρ
1
(
R,N,P
)
N
−
ρ
2
(
R,N,P
)
P
)
,
d
N
d
t
=
N
(
e
1
ρ
1
(
R,N,P
)
R
−
ρ
3
(
R,N,P
)
P
−
m
1
)
,
d
P
d
t
=
P
(
e
2
ρ
2
(
R,N,P
)
R
+
e
3
ρ
3
(
R,N,P
)
N
−
m
2
)
,
(1.1)
DOI:10.12677/aam.2022.1174594324
A^
ê
Æ
?
Ð
¾
ÿ
§
Š
#
l
Ù
¥
R
(
t
)
,N
(
t
)
Ú
P
(
t
)
©
OL
«
•
]
!
+
S
Ú
+
S
Ó
ö
—
Ý
.
ρ
2
(
R,N,P
)
R
Ú
ρ
3
(
R,N,P
)
N
©
O
´
+
Ó
ö
é
•
]
Ú
+
S
õ
U
‡
A
¼
ê
,
ρ
1
(
R,N,P
)
R
´
+
S
é
•
]
õ
U
‡
A
¼
ê
,
m
1
Ú
m
2
´
†
—
Ý
Ã
'
g
,
k
Ç
.
ë
ê
e
1
Ú
e
2
©
OL
«
•
]
é
+
S
Ú
+
S
Ó
ö
z
Ç
,
e
3
L
«
+
S
é
+
S
Ó
ö
z
Ç
,
Rϕ
(
R
)
´
•
]
Ñ
)
Ç
.
+
S
Ó
y–
3
g
,
.
¥
??•
3
,
…
3
)
+
á
¥
•
3
X
Œ
þ
~
f
[11–13].
d
,
˜
m
A
3
+
S
Ó
.
¥
•
k
N
õ
ï
Ä
[13–16].
«
+
Ï
¦
2
o
¤
,
¦
Ó
ö
é
J
é
Ô
,
B
3
?
z
L
§
¥
•
)
˜
X
·
A
5
A
,
Xb
¸
!
|
9
!
Ó
ß
ó
ä
,
¿
$
^p
?
1
J
Â
!
8
N
ö
•
ª
5
•
Ð
/
Ó
P
.2017
c
,Hilker[17]
<
ï
Ä
˜
‡
Ó
ö
-
.
,
¿
ò
Ó
ö
ö
Ü
Š
Ï
ƒ
±
HollingI
.
õ
U
‡
A
¼
ê
Ú
\
:
d
N
d
t
=
rN
(1
−
N
K
)
−
Φ(
N,P
)
P,
d
P
d
t
=
e
Φ(
N,P
)
P
−
mP,
Ù
¥
N
Ú
P
©
O
´
Ú
Ó
ö
«
+
—
Ý
,
¼
ê
Φ(
N,P
)
´
HollingI
.
õ
U
‡
A
¼
ê
,
=
Φ(
N,P
)=
λN
,
λ>
0
´
ü
‡
Ó
ö
é
ô
Â
Ç
.
3
Ó
ö
ö
Ü
Š
œ
¹
e
,
õ
U
‡
A
¼
ê
Ó
ž
û
u
Ú
Ó
ö
—
Ý
.
¦
‚
b
,
Ü
Š
Ó
ö
¬
l
§
‚
1
•
¥
É
Ã
.
Ï
d
,
ô
Â
¤
õ
Ç
¬
‘
X
Ó
ö
—
Ý
O
\
O
\
.Hilker
<
B
3
.
¥
Ï
L
^
˜
‡
—
Ý
ƒ
'
‘
O
†
~
ê
ô
Â
Ç
λ
5
L
«
ù
˜
b
:
Φ(
N,P
) = (
λ
+
aP
)
N,
(1.2)
Ù
¥
a>
0
^
5
£
ã
Ó
ö3
ö
¥
Ü
Š
r
Ý
,
aP
´
Ü
Š
‘
. Major[18]
ï
Ä
Caranxignobilis
Ú
Hawaiiananchovy
ƒ
m
ƒ
p
Š
^
,
u
y
Ó
ö
+
Ø
1
•
Œ
U
Š
•
˜
«
·
A
1
•
Ó
?
z
,
¦
Ó
ö
k
Œ
U
©
)
¿
á
+
Ø
.
¯
¤
±•
,
3
y
¢)
¥
,
Ô
«
©
Ù
´
Ø
þ
!
,
©
Ù
3
˜
m
¥
«
+
†
˜
m
•
Ù
§
«
+
ƒ
p
Š
^
,
ƒ
p
K
•
,
*
Ñ
´
—
ù
˜
y–
Ï
ƒ
˜
,
‘
k
*
Ñ
«
+
.
Ä
1
•
Ï
Ù
U
)
E
,
˜
m
‚
Û
É
¯
õ
Æ
ö
'
5
[19–22].
Ï
d
,
é
*
Ñ
A
•
Ä
´
š
~
k
7
‡
,
•
•
C
u
y
¢
.
¤
±
*
Ñ
A
3
Ó
ö
-
.
¥
2
•
ï
Ä
.
Ù
.
˜
„
/
ª
X
e
:
∂u
∂t
−
d
1
∆
u
=
f
(
u
)
u
−
p
(
u,v
)
v,x
∈
Ω
,t>
0
,
∂v
∂t
−
d
2
∆
v
=
αp
(
u,v
)
v
−
βv,x
∈
Ω
,t>
0
,
∂u
(
x,t
)
∂ν
=
∂v
(
x,t
)
∂ν
= 0
,x
∈
∂
Ω
,t>
0
,
u
(
x,
0) =
u
0
(
x
)
≥
0
,v
(
x,
0) =
v
0
(
x
)
≥
0
,x
∈
Ω
,
Ù
¥
u
(
x,t
)
,v
(
x,t
)
©
O
´
Ú
Ó
ö
«
+
©
Ù
—
Ý
,
x
∈
Ω
⊆
R
3
´
3
˜
‡
ä
k
1
w
>
.
∂
Ω
n
‘
k
.
•
,
ν
´
>
.
∂
Ω
ü
{
•
þ
.
f
(
u
)
´
Ñ
)
Ç
,
p
(
u,v
)
´
õ
U
‡
A
¼
ê
,
α
L
«
Ó
ö
¯
K
¿
ž
z
=
z
Ç
,
β
´
Ó
ö
k
Ç
,
d
1
,d
2
©
O
•
ü
«
+
g
*
Ñ
X
ê
.
Guan
[21]
ï
Ä
˜
‡
ä
k
2
o
‘
Ó
ö
-
.
,
ï
á
o
ä
Ê
ì
Å
¼
ê
,
y
²
*
Ñ
.
²
ï
:
Û
-
½
5
,
¿
(
½
˜
m
•
¥
ã
(
˜
m
,
|
^
ê
Š
[
u
y
E
,
ã
(
ª
:
^
«
!
:
-
^
«
•
!
:
ª
.
´
L
;
J
A
é
Ó
ö
-
.
Ä
K
•
.
©
Ù
•
{
Ü
©
S
NX
e
.
3
1
Ü
©
¥
ò
‰
Ñ
©
ï
á
.
.
3
1
n
Ü
©
¥
ò
©
Û
.
3
v
k
*
Ñ
œ
¹
e
,
ˆ
²
ï
:
•
3
5
Ú
-
½
5
.
1
o
Ü
©
ò
ï
Ä
.
3
Ú
\
*
Ñ
œ
¹
e
,
X
Ú
-
½
5
.
1
Ê
Ü
©
?
1
ê
Š
[
,
é
n
Ø
©
Û
‰
y
.
1
8
Ü
©
?
1
(
Ø
o
(
Ú
™
5
Ð
"
.
DOI:10.12677/aam.2022.1174594325
A^
ê
Æ
?
Ð
¾
ÿ
§
Š
#
l
2.
.
ï
á
Sapkota[23]
ï
Ä
˜
‡
ä
k
Ó
ö
Ü
Š
Ó
ö
-
.
,
T
.
´
d
ü
«
+
Ú
V
Ó
ö
«
+
|
¤
:
d
u
1
d
t
=
u
1
a
1
−
b
1
u
1
−
ω
0
(1+
αu
2
)
u
2
(1+
αu
2
)
u
1
+
D
0
,
d
u
2
d
t
=
u
2
−
a
2
+
ω
0
(1+
αu
2
)
u
1
(1+
αu
2
)
u
1
+
D
1
−
ω
2
u
3
u
2
+
D
2
,
d
u
3
d
t
=
u
2
3
a
3
−
ω
3
u
2
+
D
3
,
Ù
¥
u
1
,u
2
Ú
u
3
©
OL
«
!
¥
m
Ú
º
Ó
ö3
?
¿
ž
•
t
—
Ý
,
º
Ó
ö
Ó
¥
m
Ó
ö
§
¥
m
Ó
ö
Ó
.
¥
m
Ó
ö
ƒ
m
ö
Ü
Š
é
Ó
ö
Ú
ê
þ
Ñ
k
X
k
K
•
.
T
.
‚
5
-
½
5
Ú
ö
Ü
Š
V
ë
êê
Š
©
Û
3
©
z
[23]
¥
?
1
.
3
d
Ä
:
þ
,
Ù
„
•
Ä
*
Ñ
A
,
ï
á
+
Ó
X
Ú
:
∂X
(
x,t
)
∂t
=
d
11
∆
X
+
rX
−
d
1
X
−
α
1
XY
−
α
2
XZ,x
∈
Ω
,t>
0
,
∂Y
(
x,t
)
∂t
=
d
22
∆
Y
+
β
1
XY
−
(
α
3
+
cZ
)
YZ
−
d
2
Y,x
∈
Ω
,t>
0
,
∂Z
(
x,t
)
∂t
=
d
33
∆
Z
+
β
2
XZ
+
β
3
(
α
3
+
cZ
)
YZ
−
d
3
Z,x
∈
Ω
,t>
0
,
∂X
(
x,t
)
∂ν
=
∂Y
(
x,t
)
∂ν
=
∂Z
(
x,t
)
∂ν
= 0
,x
∈
∂
Ω
,t>
0
,
X
(
x,
0) =
X
0
(
x
)
≥
0
,Y
(
x,
0) =
Y
0
(
x
)
≥
0
,Z
(
x,
0) =
Z
0
(
x
)
≥
0
,x
∈
Ω
,
(2.1)
Ù
¥
X
(
x,t
)
,Y
(
x,t
)
Ú
Z
(
x,t
)
©
OL
«
•
]
«
+
!
+
S
«
+
Ú
+
S
Ó
ö
«
+
3
˜
x
Ú
ž
m
t
?
—
Ý
,Ω
⊂
R
N
(
N
≤
3)
´
3
˜
‡
ä
k
1
w
>
.
∂
Ω
k
.
˜
m
•
,
ν
´
>
.
∂
Ω
ü
{
•
þ
.
d
11
,d
22
Ú
d
33
©
O
´
n
«
+
g
*
Ñ
X
ê
,
r
L
«
•
]
«
+
Ñ
)
Ç
.
d
0
i
s
´
n
«
+
g
,
k
Ç
;
α
1
,α
2
Ú
α
3
©
OL
«
ˆ
g
Ó
ö
ü
ž
m
SU
¯
K
•
Œ
ê
þ
;
β
0
i
s
´
ˆ
g
Ó
ö
Ó
¼
=
z
Ç
,
i
= 1
,
2
,
3.
ë
ê
c
L
«
+
S
Ó
ö
«
+
3
ö
L
§
¥
,
Ó
ö
ƒ
m
Ó
Ü
Š
r
Ý
.
X
Ú
¥
¤
k
ë
ê
þ
•
~
ê
.
½
Â
U
= (
X,Y,Z
)
T
,
D
= diag(
d
11
,d
22
,d
33
)
9
J
(
U
) =
J
1
(
U
)
J
2
(
U
)
J
3
(
U
)
=
rX
−
d
1
X
−
α
1
XY
−
α
2
XZ
β
1
XY
−
(
α
3
+
cZ
)
YZ
−
d
2
Y
β
2
XZ
+
β
3
(
α
3
+
cZ
)
YZ
−
d
3
Z
.
(2.1)
Œ
±
U
¤
U
t
−
D
∆
U
=
J
(
U
)
,x
∈
Ω
,t>
0
,
∂
U
∂ν
= 0
,x
∈
∂
Ω
,t>
0
,
U
(
x,
0)
≥
0
,x
∈
Ω
.
(2.2)
DOI:10.12677/aam.2022.1174594326
A^
ê
Æ
?
Ð
¾
ÿ
§
Š
#
l
3.
.
-
½
5
ù
Ü
©
¥
,
Ì
‡
•
Ä
X
Ú
(2.2)
é
A
ODE
X
Ú
²
ï
:
•
3
5
!
-
½
5
!
Hopf
©
|
•
3
5
Ú
5
Ÿ
.ODE
.
X
e
:
d
U
d
t
=
J
(
U
)
.
(3.1)
X
Ú
(3.1)
k
±
e
š
K
~
ê
)
:
(1)
²
…
)
E
0
(0
,
0
,
0);
(2)
+
S
Ó
ö
«
+
Ø
•
3
ž
,
X
J
^
‡
(
H
1
):
r
−
d
1
>
0
¤
á
,
k
>
.
²
ï
:
E
1
(
X
1
,Y
1
,
0),
X
1
=
d
2
β
1
,Y
1
=
(
r
−
d
1
)
α
1
;
(3)
+
S
«
+
Ø
•
3
ž
,
X
J
^
‡
(
H
2
):
r
−
d
1
>
0
¤
á
,
k
>
.
²
ï
:
E
2
(
X
2
,
0
,Z
2
),
X
2
=
d
3
β
2
,Z
2
=
(
r
−
d
1
)
α
2
;
(4)
•
²
ï
:
E
∗
(
X
∗
,Y
∗
,Z
∗
),
Ù
¥
X
∗
=
c
(
Z
∗
)
2
+
α
3
Z
∗
+
d
2
β
1
,Y
∗
=
d
3
−
β
2
X
∗
β
3
(
α
3
+
cZ
∗
)
,
Z
∗
´
e
˜
g
•
§
Š
:
A
1
Z
2
+
A
2
Z
+
A
3
= 0
,
(3.2)
Ù
¥
A
1
=
c
(
α
1
β
2
−
α
2
β
1
β
3
)
,
A
2
=
cβ
1
β
3
(
r
−
d
1
)+
α
3
(
α
1
β
2
−
α
2
β
1
β
3
)
,
A
3
=
α
3
β
1
β
3
(
r
−
d
1
)+
α
1
(
d
2
β
2
−
d
3
β
1
)
.
,
Š
â
(
k
Î
Ò
O
K
,
Œ
±
w
Ñ
X
Ú
(3.1)
¥
•
²
ï
:
•
3
5
´
š
~
E
,
.
Ï
d
,
©
•
?
Ø
Ù
¥
˜
«
œ
¹
,
=
X
Ú
(3.1)
•
k
˜
‡
•
²
ï
:
^
‡
•
(
H
3
) :
d
3
−
β
2
X
∗
,A
1
>
0
,A
2
>
0
,A
3
<
0.
e
5
,
ò
|
^
I
O
‚
5
z
•{
5
ï
Ä
z
‡
²
ï
:
-
½
5
.
.
(3.1)
Jacobian
Ý
•
J
U
=
J
11
J
12
J
13
J
21
J
22
J
23
J
31
J
32
J
33
,
(3.3)
Ù
¥
J
11
=
r
−
d
1
−
α
1
Y
−
α
2
Z,J
12
=
−
α
1
X,
J
13
=
−
α
2
X,J
21
=
β
1
Y,
J
22
=
β
1
X
−
(
α
3
+
cZ
)
Z
−
d
2
,J
23
=
−
α
3
Y
−
2
cYZ,
J
31
=
β
2
Z,J
32
=
β
3
(
α
3
+
cZ
)
Z,
J
33
=
β
2
X
+
β
3
(
α
3
Y
+2
cYZ
)
−
d
3
.
Ú
n
3.1.
X
Ú
(3.1)
²
…
²
ï
:
E
0
(0
,
0
,
0)
o
´
Ø
-
½
.
y
²
.
X
Ú
(3.1)
3
²
ï
:
E
0
?
A
•
§
•
[
λ
−
(
r
−
d
1
)](
λ
+
d
2
)(
λ
+
d
3
) = 0
.
Œ
±
é
A
A
Š
•
λ
1
=
r
−
d
1
>
0
,λ
2
=
−
d
2
<
0
,λ
3
=
−
d
3
<
0
.
DOI:10.12677/aam.2022.1174594327
A^
ê
Æ
?
Ð
¾
ÿ
§
Š
#
l
¤
±
X
Ú
(3.1)
3
²
ï
:
E
0
?
´
Ø
-
½
.
Ú
n
3.2.
3
^
‡
(
H
1
)
¤
á
ž
,
X
J
B
33
<
0
,
X
Ú
(3.1)
3
>
.
²
ï
:
E
1
(
X
1
,Y
1
,
0)
?
´
Û
Ü
ì
C
-
½
.
y
²
.
Š
âÝ
(3.3),
.
(3.1)
3
²
ï
:
E
1
?
A
•
§
•
(
λ
−
B
33
)
λ
2
−
(
B
11
+
B
22
)
λ
+
B
11
B
22
−
B
12
B
21
= 0
,
Ù
¥
B
11
=
r
−
d
1
−
α
1
Y
1
,B
12
=
−
α
1
X
1
,B
21
=
β
1
Y
1
,B
22
=
β
1
X
1
−
d
2
,B
33
=
β
2
X
1
+
α
3
β
3
Y
1
−
d
3
.
Ï
d
,
λ
1
=
B
33
,
λ
2
Ú
λ
3
´
e
•
§
Š
:
λ
2
+
G
1
λ
+
G
2
= 0
,
Ù
¥
G
1
=
−
(
B
11
+
B
22
)
>
0
,G
2
=
B
11
B
22
−
B
12
B
21
>
0
.
l
±
þ
©
Û
Œ
±
Ñ
λ
2
<
0
Ú
λ
3
<
0,
B
33
<
0
ž
,
X
Ú
(3.1)
3
>
.
²
ï
:
E
1
?
´
Û
Ü
ì
C
-
½
.
Ú
n
3.3.
3
^
‡
(
H
2
)
÷
v
ž
,
C
22
<
0
,G
3
≥
0
ž
,
X
Ú
(3.1)
3
>
.
²
ï
:
E
2
(
X
2
,
0
,Z
2
)
?
´
Û
Ü
ì
C
-
½
.
y
²
.
.
(3.1)
3
²
ï
:
E
2
?
A
•
§
•
(
λ
−
C
22
)
λ
2
−
(
C
11
+
C
33
)
λ
+
C
11
C
33
−
C
13
C
31
= 0
,
Ù
¥
C
11
=
r
−
d
1
−
α
2
Z
2
,C
13
=
−
α
2
X
2
,C
22
=
β
1
X
2
−
(
α
3
+
cZ
2
)
Z
2
−
d
2
,C
31
=
β
2
Z
2
,C
33
=
β
2
X
2
−
d
3
.
Ï
d
λ
1
=
C
22
,
λ
2
Ú
λ
3
´
e
•
§
Š
:
λ
2
+
G
3
λ
+
G
4
= 0
,
Ù
¥
G
3
=
−
(
C
11
+
C
33
)
,G
4
=
C
11
C
33
−
C
13
C
31
>
0.
l
Ñ
λ
1
<
0
,λ
2
<
0
,λ
3
<
0
…
=
C
22
<
0
,G
3
≥
0,
Ï
d
X
Ú
(3.1)
3
>
.
²
ï
:
E
2
?
´
Û
Ü
ì
C
-
½
.
e
5
,
©
Û
•
²
ï
:
E
∗
(
X
∗
,Y
∗
,Z
∗
)
-
½
5
.
d
Ý
(3.3)
Œ
±
Ñ
.
(3.1)
3
²
ï
:
E
∗
?
A
•
§
X
e
λ
3
+
G
5
λ
2
+
G
6
λ
+
G
7
= 0
,
(3.4)
Ù
¥
G
5
=
−
(
D
11
+
D
33
)
,G
6
=
D
11
D
33
−
D
13
D
31
−
D
12
D
21
−
D
23
D
32
,
G
7
=
D
11
D
23
D
32
+
D
12
D
21
D
33
−
D
21
D
13
D
32
−
D
12
D
23
D
31
,
D
11
= 0
,D
12
=
−
α
1
X
∗
,D
13
=
−
α
2
X
∗
,
D
21
=
β
1
Y
∗
,D
22
= 0
,D
23
=
−
α
3
Y
∗
−
2
cY
∗
Z
∗
,
D
31
=
β
2
Z
∗
,D
32
=
β
3
(
α
3
+
cZ
∗
)
Z
∗
,D
33
=
cβ
3
Y
∗
Z
∗
.
Œ
•
G
5
<
0
,G
6
>
0.
Ä
u
Routh-Hurwitz
-
½
5
â
Œ
±
±
e
½
n
.
½
n
3.1.
b
^
‡
(
H
3
)
÷
v
,
k
G
5
<
0
,
X
Ú
(3.1)
3
•
²
ï
:
E
∗
(
X
∗
,Y
∗
,Z
∗
)
?
´
Ø
-
½
.
DOI:10.12677/aam.2022.1174594328
A^
ê
Æ
?
Ð
¾
ÿ
§
Š
#
l
4.
‡
A
*
Ñ
.
Ä
å
Æ
-
0=
µ
1
<µ
2
<µ
3
<
···
´
Ž
f
−
∆
3
à
g
Neumann
>
.
^
‡
e
A
Š
,
E
(
µ
i
)
´
3
H
1
(Ω)
þ
µ
i
é
A
A
˜
m
.
-
{
φ
ij
:
j
=1
,
2
,...,
dim(
E
(
µ
i
))
}
´
E
(
µ
i
)
I
O
Ä
,
…
X
= [
H
1
(Ω)]
3
,
X
ij
=
{
c
φ
ij
:
c
∈
R
3
}
,
K
X
=
+
∞
M
i
=1
X
i
,
X
i
=
dim
E
(
µ
i
)
M
j
=1
X
ij
.
(4.1)
b
^
‡
(
H
3
)
¤
á
,
-
L
=
D
∆+
J
U
(
U
∗
),
X
Ú
(2.2)
3
U
∗
?
‚
5
z
X
Ú
•
U
t
=
L
U
.
é
z
‡
i
≥
1
,
X
i
3
Ž
f
L
e
´
ØC
,
…
λ
´
L
˜
‡
A
Š
…
=
é
i
≥
1,
X
J
λ
´
Ý
−
µ
i
D
+
J
U
(
U
∗
)
˜
‡
A
Š
,
K3
Ž
f
X
i
¥
•
3
˜
‡
A
•
þ
.
−
µ
i
D
+
J
U
(
U
∗
)
A
õ
‘
ª´
ϕ
i
(
λ
) =
λ
3
+
H
1
i
λ
2
+
H
2
i
λ
+
H
3
i
,
Ù
¥
H
1
i
= (
d
11
+
d
22
+
d
33
)
µ
i
+
G
5
,
H
2
i
= (
d
11
d
22
+
d
11
d
33
+
d
22
d
33
)
µ
2
i
−
[
D
33
d
11
+(
D
11
+
D
33
)
d
22
+
D
11
d
33
]
µ
i
+
G
6
,
H
3
i
=
d
11
d
22
d
33
µ
3
i
−
(
D
33
d
11
+
D
11
d
33
)
d
22
µ
2
i
−
[
D
23
D
32
d
11
+
D
12
D
21
d
33
+(
D
13
D
31
−
D
11
D
33
)
d
22
]
µ
i
+
G
7
,
D
ij
Ú
G
i
3
ª
f
(3.4)
¥
‰
Ñ
.
X
J
d
33
≥
d
11
,
K
k
H
1
i
,H
2
i
,H
3
i
>
0.
Ï
L
O
Ž
Œ
H
1
i
H
2
i
−
H
3
i
=
G
11
µ
3
i
+
G
12
µ
2
i
+
G
13
µ
i
+
G
5
G
6
−
G
7
,
(4.2)
G
11
= (
d
11
+
d
22
+
d
33
)(
d
11
d
22
+
d
11
d
33
+
d
22
d
33
)
−
d
11
d
22
d
33
>
0
,
G
12
= (
d
11
d
33
+
d
2
22
+2
d
11
d
22
+2
d
22
d
33
)
G
5
−
(
d
11
+
d
33
)(
D
33
d
11
+
D
11
d
33
)
>
0
,
G
13
= (
D
11
+
D
33
)[
D
33
d
11
+
D
11
d
33
+(
D
11
+
D
33
)
d
22
]+
G
6
(
d
11
+
d
33
)+
D
23
D
32
d
11
+
D
12
D
21
d
33
−
(
D
12
D
21
+
D
23
D
32
)
d
22
.
X
J
d
22
≥
d
11
,d
33
,
K
k
G
13
>
0.
½
n
4.1.
b
^
‡
(
H
3
)
,
±
9
d
22
≥
d
33
≥
d
11
÷
v
,
du
G
5
<
0
,G
7
>
0
,G
5
G
6
−
G
7
<
0
,
¤
±
X
Ú
(2.2)
•
²
ï
:
E
∗
(
X
∗
,Y
∗
,Z
∗
)
´
Ø
-
½
.
5.
ê
Š
[
3ù
˜
Ü
©
,
ò
Ï
L
ê
Š
[
5
y
²
c
A
!
©
Û
(
J
.
X
Ú
(2.1)
Ð
Š
b
•
X
(0)=
0
.
41
,Y
(0)=0
.
21
,Z
(0) = 0
.
2
.
Ù
¦
ë
ê
Š
À
J
X
e
:
r
= 0
.
7
,d
1
= 0
.
12
,α
1
= 1
.
9
,α
2
= 2
.
5
,β
1
=
2
.
2
,α
3
= 2
.
57
,c
= 0
.
5
,d
2
= 0
.
2
,β
2
= 1
.
1
,β
3
= 2
,d
3
= 0
.
5
.
Ä
k
,
y
²
~
‡
©
.
(3.1)
-
½
5
.
Š
â
½
n
3.1,
.
(3.1)
k
²
ï
:
E
∗
=
(0
.
3430
,
0
.
0237
,
0
.
2140)
…
´
Ø
-
½
(
„
ã
1
Ú
ã
2).
e
5
,
½
ë
ê
r
= 0
.
7
,d
1
= 0
.
12
,α
1
= 1
.
9
,α
2
= 2
.
5
,β
1
= 2
.
2
,α
3
= 2
.
57
,d
2
= 0
.
2
,β
2
=
1
.
1
,β
3
= 2
,d
3
= 0
.
5
,
X
Ú
(3.1)
v
k
Ó
ö
ö
Ü
Š
A
ž
,
3
²
ï
:
E
∗
?
Ä
å
Æ1
•
„
ã
3.
DOI:10.12677/aam.2022.1174594329
A^
ê
Æ
?
Ð
¾
ÿ
§
Š
#
l
Figure1.
The co-existenceequilibrium
E
∗
of model(3.1)isunstable.(a)Sharedresource;(b)IG prey;(c)IG
predator
ã
1.
.
(3.1)
•
²
ï
:
E
∗
´
Ø
-
½
"
(a)
•
]
¶
(b)
+
S
¶
(c)
+
S
Ó
ö
Figure2.
Thedynamicbehaviorofthemodel(3.1).(a)Unstablebehaviorofpopulation;
(b)phaseportrait
ã
2.
.
(3.1)
Ä
å
Æ1
•
"
(a)
«
+
Ø
-
½
1
•
¶
(b)
ƒ
ã
d
,
Ú
\
Ó
ö
ö
Ü
Š
A
ž
,
X
Ú
(3.1)
3
E
∗
?
Ä
å
Æ1
•
„
ã
4.
T
ã
L
²
Ó
ö
Ü
Š
A
o
´¦
X
Ú
Ø
-
½
.
•
,
·
‚
À
J
˜
X
ë
ê
5
[
X
Ú
(2.1):Ω=[0
,
10
π
]
,r
=0
.
7
,d
1
= 0
.
12
,α
1
= 1
.
9
,α
2
=
2
.
5
,β
1
=2
.
2
,α
3
=2
.
57
,c
=0
.
3
,d
2
=0
.
2
,β
2
=1
.
1
,β
3
=2
,d
3
=0
.
5
.
Š
â
½
n
4.1,
d
11
= 10
,d
22
= 20
,d
33
= 15
ž
,
X
Ú
(2.1)
•
²
ï
:
E
∗
´
Ø
-
½
(
„
ã
5).
6.
o
(
†
Ð
"
©
ï
Ä
˜
‡
ä
k
Ó
ö
ö
Ü
Š
*
Ñ
+
Ó
.
.
Ù
¥
,
Ó
ö
ö
Ü
Š
Ï
ƒ
•
Ä
+
S
Ó
ö
é
+
S
HollingI
.
õ
U
‡
A
¥
.
Ä
k
,
3
v
k
*
Ñ
œ
¹
e
,
?
Ø
.
²
ï
:
•
3
5
Ú
-
½
5
.
Ï
L
ê
Š
[
,
u
y
Ú
\
Ó
ö
ö
Ü
Š
ë
ê
c
ž
,
o
¬
¦
X
Ú
(3.1)
C
Ø
-
½
.
d
,
é
*
Ñ
X
Ú
(2.1),
3
˜
½
^
‡
e
,
X
Ú
o
´
Ø
-
½
.
3
©
ï
Ä
¤
J
Ä
:
þ
,
²
Ù
¦
ƒ
'
©
z
u
y
„
k
N
õ
Ù
¦
ó
Š
k
–
ï
Ä
.
1
˜
,
„
Œ
±
•
Ä
Ù
§
©
|
,
X
:Bogdanov-Taken
©
|
!
Ó
‰
©
|
;
Ù
g
,
v
k
•
Ä
Ú
\B
ž
¢
¦
.
•
DOI:10.12677/aam.2022.1174594330
A^
ê
Æ
?
Ð
¾
ÿ
§
Š
#
l
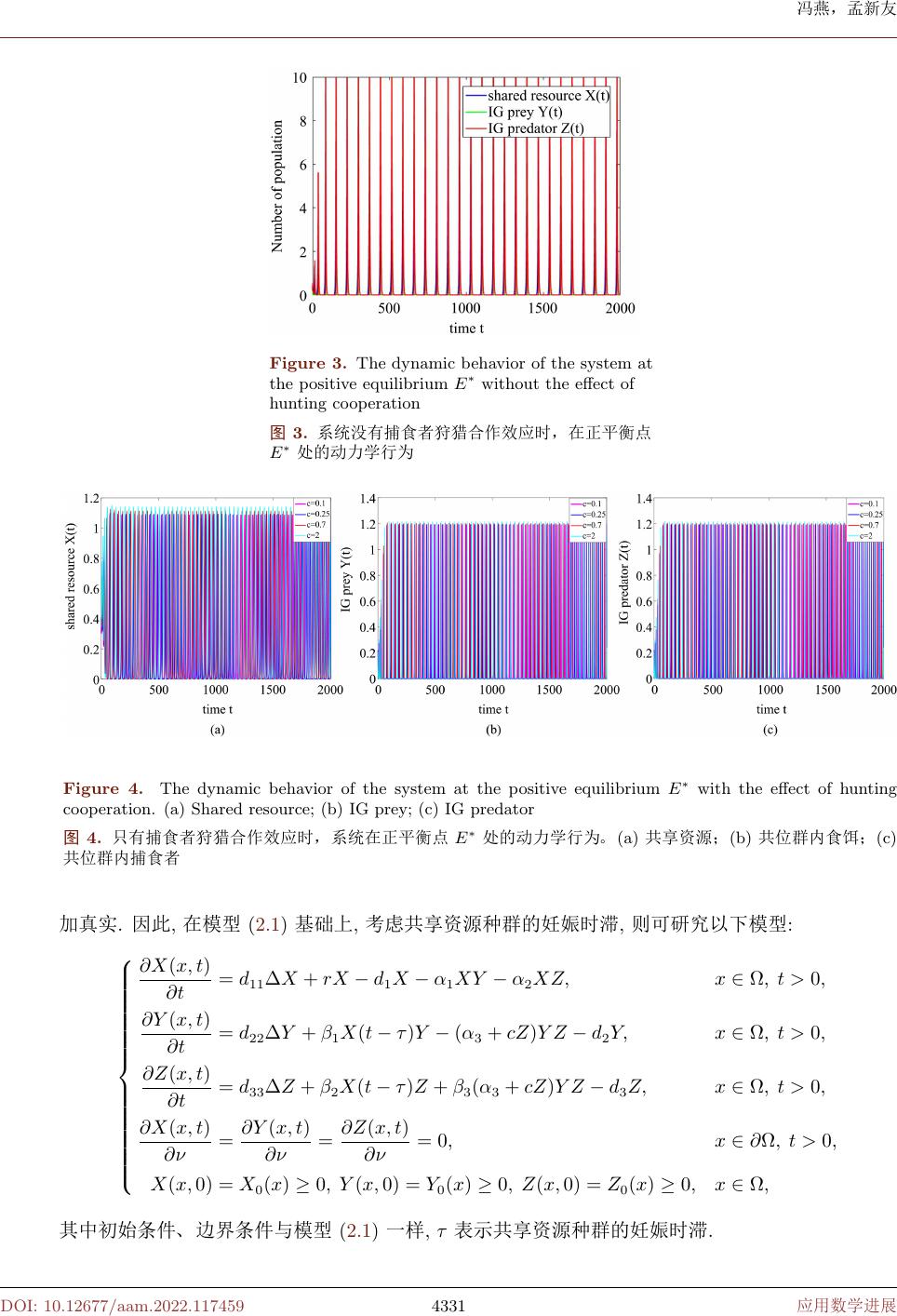
Figure3.
Thedynamicbehaviorofthesystemat
thepositiveequilibrium
E
∗
withouttheeffectof
huntingcooperation
ã
3.
X
Ú
v
k
Ó
ö
ö
Ü
Š
A
ž
§
3
²
ï
:
E
∗
?
Ä
å
Æ1
•
Figure4.
Thedynamicbehaviorofthesystematthepositiveequilibrium
E
∗
withtheeffectofhunting
cooperation.(a)Sharedresource;(b)IGprey;(c)IGpredator
ã
4.
•
k
Ó
ö
ö
Ü
Š
A
ž
§
X
Ú
3
²
ï
:
E
∗
?
Ä
å
Æ1
•
"
(a)
•
]
¶
(b)
+
S
¶
(c)
+
S
Ó
ö
\
ý
¢
.
Ï
d
,
3
.
(2.1)
Ä
:
þ
,
•
Ä
•
]
«
+
B
ž
¢
,
K
Œ
ï
Ä
±
e
.
:
∂X
(
x,t
)
∂t
=
d
11
∆
X
+
rX
−
d
1
X
−
α
1
XY
−
α
2
XZ,x
∈
Ω
,t>
0
,
∂Y
(
x,t
)
∂t
=
d
22
∆
Y
+
β
1
X
(
t
−
τ
)
Y
−
(
α
3
+
cZ
)
YZ
−
d
2
Y,x
∈
Ω
,t>
0
,
∂Z
(
x,t
)
∂t
=
d
33
∆
Z
+
β
2
X
(
t
−
τ
)
Z
+
β
3
(
α
3
+
cZ
)
YZ
−
d
3
Z,x
∈
Ω
,t>
0
,
∂X
(
x,t
)
∂ν
=
∂Y
(
x,t
)
∂ν
=
∂Z
(
x,t
)
∂ν
= 0
,x
∈
∂
Ω
,t>
0
,
X
(
x,
0) =
X
0
(
x
)
≥
0
,Y
(
x,
0) =
Y
0
(
x
)
≥
0
,Z
(
x,
0) =
Z
0
(
x
)
≥
0
,x
∈
Ω
,
Ù
¥
Ð
©
^
‡
!
>
.
^
‡
†
.
(2.1)
˜
,
τ
L
«
•
]
«
+
B
ž
¢
.
DOI:10.12677/aam.2022.1174594331
A^
ê
Æ
?
Ð
¾
ÿ
§
Š
#
l
Figure5.
Unstablebehaviorforsystem(2.1)with
d
11
= 1
,d
22
= 0
.
05
,d
33
= 0
.
01
,m
1
= 0
.
8
ã
5.
d
11
= 1
,d
22
= 0
.
05
,d
33
= 0
.
01
m
1
= 0
.
8
§
X
Ú
(2.1)
Ø
-
½
51
•
Ä
7
‘
8
I
[
g
,
‰
Æ
Ä
7
‘
8
(12161054
9
11661050)
¶
[
‹
Ž
g
,
‰
Æ
Ä
7
‘
8
(20JR10RA156)
"
ë
•
©
z
[1]Lotka,A.J.(1926)ElementsofPhysicalBiology.
AmericanJournalofPublicHealth
,
82
,341-
343.
[2]Volterra,V.(1928)Variations andFluctuationsoftheNumberofIndividualsinAnimalSpecies
LivingTogether.
JournalofMarineScience
,
3
,3-51.https://doi.org/10.1093/icesjms/3.1.3
[3]Meng,X.Y.,Huo,H.F.andZhang,X.B.(2019)StabilityandGlobalHopfBifurcationina
Leslie-GowerPredator-PreyModelwithStageStructureforPrey.
JournalofAppliedMathe-
maticsandComputing
,
60
,1-25.https://doi.org/10.1007/s12190-018-1201-0
[4]Meng,X.Y.,Huo,H.F.,Xiang,H.andYin,Q.Y.(2014)StabilityinaPredator-PreyModel
withCrowley-MartinfunctionandStageStructureforPrey.
AppliedMathematicsandCom-
putation
,
232
,810-819.https://doi.org/10.1016/j.amc.2014.01.139
[5]Meng,X.Y.,Huo,H.F.andZhang,X.B.(2011)StabilityandGlobalHopfBifurcationina
DelayedFoodWebConsistingofaPreyandTwoPredators.
CommunicationsinNonlinear
Science and Numerical Simulation
,
16
,4335-4348.https://doi.org/10.1016/j.cnsns.2011.03.009
DOI:10.12677/aam.2022.1174594332
A^
ê
Æ
?
Ð
¾
ÿ
§
Š
#
l
[6]Meng,X.Y.,Qin,N.N.andHuo,H.F.(2018)DynamicsAnalysisofaPredator-PreySystem
withHarvestingPreyandDiseaseinPreySpecies.
JournalofBiologicalDynamics
,
12
,342-
374.https://doi.org/10.1080/17513758.2018.1454515
[7]Wanjugi,P.andHarwood,V.J.(2013)TheInfluenceofPredationandCompetitiononthe
SurvivalofCommensalandPathogenicFecalBacteriainAquaticHabitats.
Environmental
Microbiology
,
15
,517-526.https://doi.org/10.1111/j.1462-2920.2012.02877.x
[8]Catano,L.B.,Shantz,A.A.andBurkepile,D.E.(2014)PredationRisk,Competition,and
TerritorialDamsel-FishesasDriversofHerbivoreForaging onCaribbean CoralReefs.
Marine
EcologyProgressSeries
,
511
,193-207.https://doi.org/10.3354/meps10921
[9]Polis,G.A., Myers, C.A.andHolt, R.D.(1989)TheEcologyandEvolutionof IntraguildPreda-
tion:Potential Competitors That Eat Each Other.
Annual ReviewofEcologyandSystematics
,
20
,297-330.https://doi.org/10.1146/annurev.es.20.110189.001501
[10]Holt,R.D.andPolis,G.A.(1997)ATheoreticalFrameworkforIntraguildPredation.
The
AmericanNaturalist
,
149
,745-764.https://doi.org/10.1086/286018
[11]Doncaster, C.P.(1992) Testing theRole of Intraguild Predationin RegulatingHedgehog Popu-
lations.
ProceedingsoftheRoyal Society ofLondon. Series B: Biological Sciences
,
249
,113-117.
https://doi.org/10.1098/rspb.1992.0092
[12]Polis,G.A.andHolt,R.D.(1992)IntraguildPredation:TheDynamicsofComplexTrophic
Interactions.
TrendsinEcologyandEvolution
,
7
,151-154.
https://doi.org/10.1016/0169-5347(92)90208-S
[13]Bampfylde,C.andLewis,M.(2007)BiologicalControlthroughIntraguildPredation:Case
StudiesinPestControl,InvasiveSpeciesandRangeExpansion.
BulletinofMathematical
Biology
,
69
,1031-1066.https://doi.org/10.1007/s11538-006-9158-9
[14]Amarasekare,P.(2006)Productivity,DispersalandtheCoexistenceofIntraguildPredators
andPrey,
JournalofTheoreticalBiology
,
243
,121-133.
https://doi.org/10.1016/j.jtbi.2006.06.007
[15]Sieber, M. and Hilker, F.M. (2011) Prey, Predators, Parasites:IntraguildPredation or Simpler
CommunityModulesinDisguise?
JournalofAnimalEcology
,
80
,414-421.
https://doi.org/10.1111/j.1365-2656.2010.01788.x
[16]Ryan, D.andCantrell, R.S.(2015) Avoidance Behavior inIntraguild PredationCommunities:
ACross-DiffusionModel.
DiscreteandContinuousDynamicalSystems
,
35
,1641-1663.
https://doi.org/10.3934/dcds.2015.35.1641
[17]Alves,M.T.andHilker,F.M.(2017)HuntingCooperationandAlleeEffectsinPredators.
JournalofTheoreticalBiology
,
419
,13-22.https://doi.org/10.1016/j.jtbi.2017.02.002
[18]Major,P.F.(1978)Predator-PreyInteractionsinTwoSchoolingFishes,
Caranxignobilis
and
Stolephoruspurpureus
.
AnimalBehaviour
,
26
,760-777.
https://doi.org/10.1016/0003-3472(78)90142-2
[19]Yue,Z.M. andWang,W.J. (2013)QualitativeAnalysisofa Diffusive Ratio-DependentHolling-
TannerPredator-PreyModelwithSmithGrowth.
DiscreteDynamicsinNatureandSociety
,
2013
,ArticleID:267173.https://doi.org/10.1155/2013/267173
[20]Jiang,H.P.,Fang,H.P.andWu,Y.F.(2020)HopfBifurcationinaDiffusivePredator-Prey
Model withSmithGrowthRateand HerdBehavior.
AdvancesinDifferenceEquations
,
2020
,
ArticleNo.518.https://doi.org/10.1186/s13662-020-02879-4
DOI:10.12677/aam.2022.1174594333
A^
ê
Æ
?
Ð
¾
ÿ
§
Š
#
l
[21]Guan,X.N.,Wang,W.M.andCai,Y.L.(2011)SpatiotemporalDynamicsofaLeslie-Gower
Predator-PreyModelIncorporatingaPreyRefuge.
NonlinearAnalysis:RealWorldApplica-
tions
,
12
,2385-2395.https://doi.org/10.1016/j.nonrwa.2011.02.011
[22]Ou,Y.Q.(2010)NolinearScienceandthePatternDynamicsIntroduction.PekingUniversity
Press,Beijing.
[23]Sapkota,N.,Bhatta,R.,Dabney,P.andXie,Z.(2020)HuntingCo-OperationintheMiddle
PredatorinThreeSpeciesFoodChainModel.arXivpreprintarXiv:2006.16525
DOI:10.12677/aam.2022.1174594334
A^
ê
Æ
?
Ð