Applied Physics
Vol.
13
No.
05
(
2023
), Article ID:
65741
,
9
pages
10.12677/APP.2023.135026
工程测绘中的激光雷达技术应用与研究
方炎林1,吴涉成1,陈超1,李佳艺2
1衢州市华创房地产测绘有限公司,浙江 衢州
2衢州职业技术学院机电工程学院,浙江 衢州
收稿日期:2023年3月27日;录用日期:2023年5月18日;发布日期:2023年5月24日

摘要
测绘技术在中国已经有许多年的应用历史,在实践中我们不断探索前进,为保证工程测绘的质量,将相应的技术应用其中十分必要,现在最突出的是LiDAR测绘技术可以大大提高测绘效率,更好地达到测绘的目的。激光雷达技术是一种高精度、高效率、非接触式三维测量技术,以快速、准确、高效、经济地获取三维表面信息。已经在测绘领域得到了广泛的应用。本文从激光雷达的工作原理、特点和应用入手,结合实际应用案例,探讨了激光雷达在测绘中的应用研究。
关键词
激光雷达,测绘,三维测量,应用研究

Application and Research of LiDAR Technology in Engineering Mapping
Yanlin Fang1, Shecheng Wu1, Chao Chen1, Jiayi Li2
1Quzhou Huachuang Real Estate Mapping Co., Ltd., Quzhou Zhejiang
2School of Mechanical and Electrical Engineering, Quzhou College of Technology, Quzhou Zhejiang
Received: Mar. 27th, 2023; accepted: May 18th, 2023; published: May 24th, 2023

ABSTRACT
Mapping technology has been applied in China for many years, in practice, we continue to explore forward. In order to ensure the quality of engineering mapping, it is necessary to apply the corresponding technology to it, and now the most prominent is the application of LiDAR mapping technology, which greatly improves the efficiency and can better achieve the purpose of mapping. LiDAR technology is a highly accurate, efficient, non-contact 3D measurement technique to obtain 3D surface information quickly, accurately, efficiently and economically. It has been widely used in the field of surveying and mapping. Starting from the working principle, characteristics and applications of LiDAR, this paper discusses the research on the application of LiDAR in surveying and mapping, combined with practical application cases.
Keywords:LiDAR, Mapping, 3D Measurement, Application Research

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 概述
激光雷达技术是一种基于激光束扫描测量目标位置和形状的高精度测量技术。激光雷达测量具有非接触、高精度、高效率、全天候等特点,已经在许多领域得到了广泛应用,特别是在测绘领域中,其应用越来越广泛。
2. 激光雷达的工作原理和技术特点
2.1. 激光雷达的工作原理
激光雷达将激光束发射到目标物体上,接收反射回来的激光,通过计算激光束发射和接收的时间差、激光束的传播速度和光程,来确定目标物体的位置和形状。激光雷达的测量精度可以达到亚毫米级别,而且可以对目标物体进行全方位、高速、高精度的扫描,具有非常高的测量效率。
脉冲测量与基于相位差测量是使用频率较高的两种激光测距方式,基于相位差测量原理为:获取发射信号与目标反射信号之间的相位差值,求取两者间的距离,完成测绘。相对而言,脉冲测量在激光雷达测距中的使用频率相对较高,为此,监测土地变动时采用激光脉冲测距方法,测距表达式为:
(1)
公式中,ω表示激光发射点与反射点间测长度,t是激光脉冲到达目标返回的时长;e表示光速;Δω与Δt分别是激光测距的距离分辨率、测距系统的测时分辨率。
2.2. 激光雷达技术特点
激光雷达技术特点包括非接触式测量,通过激光束的扫描来实现对目标物体的非接触式测量,避免了传统测量方法中的接触误差和测量难度;高精度,测量精度可以达到亚毫米级别,比传统测量方法有更高的精度和可靠性;高效率,对目标物体进行全方位、高速、高精度的扫描,可以快速获取大量的测量数据,从而提高测量效率;全天候,可以在不同的天气和光照条件下进行测量,具有全天候的能力 [1] 。具体优势有:
1) 勘测和制图精度:与传统的勘测和制图技术相比,激光雷达勘测和制图技术大大提高了目标测量范围和精度的测量,尤其是在勘测和制图精度方面,实现了飞跃质量。每个地图的形成并不是简单的制图结果,而是通过多次探索、测量、重复论证和推理获得的结果。在使用激光雷达扫描和制图技术收集基本数据后,扫描和制图的原型是问题所在。因此,激光雷达测量和制图技术可以弥补传统测量和制图技术在准确性上的一些缺点。测量精度为确保建筑工程提供了良好的基础。
2) 测量信息的集成:扫描和制图技术使用电磁波信号雷达绘制测量目标的地图。由于电磁波的强烈穿透,脉冲信号通过发射激光器传输到物体测量,然后反射收集到的信号,并在位置、空间、质量、大小、形状、目标测量路径运动上进行测量和工业分析。基于人体测量的基本参数,以及运动模式和周围环境等一系列因素,激光雷达扫描和制图技术构建了一个相对逼真的3D物理模型。将数字技术与现代先进数字技术相结合,更直观的虚拟数字摄影是一个问题。合成、多方向、多角度扫描和制图雷达激光技术极大地丰富了建筑工程所需的信息,并提供了更全面的参考信息和建筑工程模型。
3) 及时测量信息:为了测量不断变化的目标,此功能更加清晰,激光雷达测绘技术也是一种相对广泛的应用。在扫描和制图过程中,自然环境中的一些目标可能会随着时间的推移而变化,而有管理的扫描和制图技术会不时使用GPS来确定目标位置,这可以有效地实现确保目标安全。无论身体测量的环境如何,或参数质量和大小的某些变化,都会通过信号的变化来反映。计算机将快速收集、处理、存储和分析不断变化的信号,并再次构建新的3D物理模型。与传统的测量和制图技术相比,它对信息的变化更加敏感,提高信息的及时性大大减少了环境变化对测量和制图结果的影响。
3. 激光雷达在测绘中的应用研究
激光雷达技术在测绘中的应用主要包括以下几个方面:
1) 应用于大型精密测绘
建筑工程测量、平整测量和测量失真是测量和制图的准确性。这些项目对基于目标信息构建3D模型有很高的要求。然而,扫描和制图技术不仅可以快速准确地管理目标测量的三维模型,还可以使用数字图像分析目标测量的信息结构 [2] 。大规模测量和制图精度可以有效满足项目需求。激光雷达扫描和制图技术提供有效的信息,支持精密工程的规划和管理,使精密工程顺利进行。
2) 应用于矿山和森林工业测绘
随着中国经济的快速发展和人民生活水平的提高,对矿山等能源资源的需求也在增加。然而,采矿和其他能源资源在我们生活的自然环境中造成了一些破坏。矿产资源匮乏和环境保护是我们今天面临的问题,可以通过使用激光雷达测量和制图技术来有效解决。它可以提供可靠、有效的信息和采矿工程模型,科学、真实地绘制矿山的经济状况和生态环境。森林覆盖范围广泛,种类繁多,影响了测量和制图工作。激光测量和制图技术在森林资源调查中发挥着重要作用 [3] 。实践表明,管理测绘技术为数字矿山建设和获取森林资源信息提供了重要支持,并为该项目提供了有效的信息数据。
3) 用于管道和电力系统建设
激光雷达系统通过无人机检测和监控城市管道和电力系统。如今,由于无人机体积小,无数的激光脉冲可以沿着管道和电线的通道飞行。这种方法不仅成本低,而且可以及时调整飞机的速度和高度。结合激光雷达系统、数码相机和一些传感器,可以获得更准确的数据信息,有效准确地绘制电路图,可用于输电管道和控制管道 [4] 。例如,空中雷达激光技术在电力工程中的应用,首先,激光雷达收集的数字云数据和图像的激光点被转换为数字图像生成。典型的数字崛起。在这个3D场景中设计电路以建造最佳的电气道路,在飞机上使用空中雷达激光技术扫描图像,收集高层建筑周围的线条,盖高素食主义者和信息的危险点。为了确保未来安全使用电线,有必要使用空中成像激光对电线进行定期巡逻。通过创建3D模型来测量电力线与物体地面之间的距离,可以有效消除电力线安全的潜在风险,从而确保电力线的正常运行。
除此之外,激光雷达技术在数字地形模型(DTM)的制作,实现地形分析、地形变化监测等、三维建模,进行三维建模和分析,用于建筑、城市规划、文物保护等领域、地下管线的探测,通过地面上的扫描来探测地下管线的位置和深度,从而避免了传统探测方法中的破坏和危险、地震研究,通过对地表进行高精度扫描,来获取地表形变信息,用于地震研究和地震灾害预警等方面也有具体应用。
4. 实际应用案例
激光雷达技术已经成为测绘领域中不可或缺的一种技术手段。其应用范围广泛,包括但不限于制作数字地形模型,用于地形分析和地形变化监测,建筑物和文物的三维建模和保护,地下管线的探测以及地震研究等领域。在数字地形模型方面,激光雷达可以通过高精度的三维点云数据获取地形信息,从而实现对地形的精准测量和分析。在建筑物和文物的三维建模和保护方面,激光雷达可以获取高精度的建筑物和文物的三维数据,从而实现对其进行数字化保存和保护。在地下管线探测方面,激光雷达可以通过穿透地表获取地下管线的信息,从而实现对地下管线的精准探测和定位。激光雷达技术在测绘领域的广泛应用,为测绘工作的精准性和效率提供了有力的支撑和保障 [5] 。下面重点介绍一下机载激光雷达测量和三维激光雷达具体应用。
4.1. 机载激光雷达测量
机载激光雷达是一种广泛的激光探测系统,可以通过脉冲将目标探测信息返回到距离、反射和倾斜。其主要功能可分为以下几个方面:一是系统惯性导航,主光轴可以实现空间参数的测量位置;其次,基于相位差动力学的微分系统可以确定空间参数投影的位置 [6] 。激光测距系统可以测量传感器和目标探测器之间的距离。当无线电波通过身体反射时,空中的雷达系统可以从发射器发射无线电波,然后由雷达负责接收,这可以有效地反映无线电之间的距离第四,一种数字成像系统,其主要功能是从目标信息中获取红外图像。地球上的激光点可以求解空间坐标:
(2)
载激光雷达空中摄影测量数据高度,甚至可以有效地用于遥感地图。在环境监测和地形制图过程中,空中激光雷达可以保持良好的稳定性和抵抗因素干扰外部条件差,并且具有短周期的高精度数据生成特征。此外,激光脉冲可以避免阴影和角度的影响,因此收集的数据质量相对较高。高度可以它还可以防止高度限制,使多波束信息密度远高于航空摄影数据密度,提高校正图像校正精度,跟踪数字地图和GIS应用程序数据支持。
便携式激光雷达的技术优势如下:首先,系统本身属于高效系统,可以在所有天气条件下实现工作。其次,激光穿透性能优异,即使在植被覆盖率高的地区也是如此。地形,但也可以获得有关地球表面的准确数据。第三,高精度、传统航空摄影数据的准确性与飞行高度成反比,即使飞行高度值很大,也很难保证数据的准确性为了满足应用标准。但是,空中激光雷达不同,该技术不仅限于飞行高度,在正常情况下,它可以保证高度精度小于10厘米,飞机精度也优于30厘米。空中操作周期激光雷达相对较短,运行成本低于气相色谱。在收集数据和获取DSM后,可以保证在数据处理软件的帮助下完成所有操作,Marka更方便、更快。
机载激光雷达航测——无人机、镜头型号及其参数
规格:长度和宽度M300科索沃广播电视无人机(图1)集成了新疆维吾尔自治区的先进飞行控制系统,与单避开雷达障碍兼容,包含六个方向本地化和避免工作障碍。它可以应用于许多dgc 2.0摄像头接口。云系统平台可以同时支持多达三个独立的云平台系统,可以满足不同领域的需求。这架飞机建在科索沃广播电视台,可以实现高精度、定位精度。双电池系统提高了飞行安全性,飞行时间约为55分钟。

Figure 1. Unmanned aircraft
图1. 无人机
认证,包括研究区域测量、测距控制点图像和测量、路径规划、空中激光测量和制图系统、数据处理和分析盆地。为了满足本研究中的精度要求,有必要在研究区域进行空中雷达航空勘测之前,将地球图像设置为观察点。在安排地面观察点图像时,应注意观察点清晰可见,易于识别和测量。实时动态测量(RTK)用于收集研究区域观测点的地球图像,以获得中国大地坐标系统(CGCS2000)观测点的图像坐标。
研究区域位于天津济州,面积115,555平方米。在初步数据收集和实地调查后,计划了飞行路径,高度为100米,激光横向干扰率为40%,工作速度为8米/秒。在研究区域进行了空中雷达测量,如下所示。
通过制作数字高程模型(Marka)、kvaf和DOM,我们编辑和处理点数据和数据载体,最终生成符合研究要求的大型地形图。在AutoCAD 2016平台上,使用cass 10.1地形图采集功能调用驱动图数据,将上一阶段获得的测量区域数据上传到地图上,同时从测量区域校正的数字图像数据被加载,飞机向量绘制地面物体。根据扫描和制图标准,康图里耶地图,由扫描和制图系统收集的对象向量图,地图中对象的符号元素根据图表的规定进行编辑和精确排序,因此完成符合创建测量区域要求的地形图。
1) 在场景1中,使用激光雷达数据构建的是高分辨率DOM和德国马克,然后根据这些数据生成分数。目前,所使用的软件无法通过DOM直接从德国马克生成。因此,只能通过检测功能表面检测设备的地形图,检测轮廓表面的形状。① VAV生成:可以通过读取QT软件模型中的Marka数据并生成VAV来创建VAV。数据云可以从激光站以轮廓形式直接读取。② 收集表面和形状:在VirtuoZo胃收缩控制器中,可以测量表面和形状的特征。马卡数据可以直接传输到胃收缩调节器,胃收缩调节器可以快速提取土壤特性、点高、地表形态等元素。House很难更正高分辨率DOM数据以完全满足orthophotograph的需求。由于高度限制,屋顶无法直接落在房屋底部,因此图像和建筑物高度会扭曲。因此,在收集房屋时,您必须根据高度进行不同的处理。如果建筑物的高度小于一层,并且建筑物的变形小于一层,则可以满足地形图的要求,并且可以直接拍摄。如果房屋面积超过两层,房屋变形更大,则直接收集时最大的错误。③ 图形编辑:目前,在CAD中,DLG地形图格式为DWG设置。由于每种类型的软件都可以生成不同的数据链接和符号导体,因此有必要处理加拿大主体的地球轮廓,以满足制图要求。事实上,Marka创建的轮廓可以反映表面的实际状态,但由于模型本身不够流畅,轮廓上有许多皱纹,这阻碍了图形编辑。
2) 精度分析
为了测试文件夹创建计数的准确性,基于点测量精度,方法散射场随机选择均匀分布的特征点。莱卡tc705站用于比较特征点的相应坐标,收集数据,并计算点的平均误差高度。根据规格,飞机误差为± 1.2米,高度误差为0.5米。测试结果的准确性表明,在数学精度方面,计算使用激光雷达数据创建的地形图文件夹基本上可以满足地形图标准 [7] 。
(3)
其中:ρ为点云密度平均值,n为点云点数,A为点云覆盖面积,m为区块数。点云精度包括点云高程精度和点云平面精度,是基于设置于平坦区域的野外实测点三维坐标数据与激光点云三维坐标数据联合计算的中误差,计算公式如下:
(4)
3) CASS绘制地形图
使用CASS 9.2专业地形图测绘软件为地物、等高线和高程点分配属性,并根据地形图方案的要求修剪地形图、切割等高线和生成轮廓线。
数字高程模型(图2)制作主要通过机载激光雷达获取的点云数据生成。其中机载激光雷达数据处理流程主要包括点云数据预处理及基于预处理后的点云数据深度处理分析。

Figure 2. Digital elevation model
图2. 数字高程模型
4.2. 三维激光雷达
三维激光雷达是一种新型的扫描和制图技术,结合了许多类型的高科技和新型技术。高速激光使用非接触测量,以点云形式从一组复杂物体的三维表面地形中获取工程数据 [8] 。三维激光雷达,包括3D空气管理和3D地面管理。便携式3D激光雷达具有高速数据采集和高数据处理效率的优势。广泛应用于数字城市、气象和环境监测、高速公路、农业、林业、畜牧业、土地资源、交通线路等测量和制图领域 [9] 。
三维激光雷达点云的空间坐标数据是依据这些测量数据计算而来,机载动态差分全球定位接收机以及惯性导航装置实时记录三维坐标O(X0, Y0, Z0)、无人机侧滚角ω、无人机俯仰角α、无人机偏航角κ、从发射光波到接收反射光波的经历时间t,编码器按固定的激光脉冲间隔给出激光束与扫描起始激光束的交角θ,然后基于如下公式求出地面任意测量点P(Xi, Yi, Zi)三维坐标 [10] 。
(5)
其中:
(6)
三维激光雷达(图3)结合了新型测量工具的优势,使其成为相对较新的高科技测量系统。它不仅结合了激光技术的各种优势,还结合了GPS和惯性测量系统在测量数据格式方面的优势。此外,三维激光雷达可以区分地球和河流等自主物体,有效地结合数据以收集信息并突出坐标。用于测量距离的三维激光雷达系统的原理可以从以下三个方面来描述:① 当雷达系统处于整个系统工作状态时,它将发射反射物体表面并收集特定信息的激光。② 当以雷达形式发送给接收器的信息反射主处理器信号时,可以根据该状态确定物体测量的相关参数,有效提高未知测量精度。③ 将整个测距雷达系统与特定测量设备和信息相结合,以调整特定位置的角度,从而确定雷达脉冲以全速到达应用点的有效性,并减少传输和接收之间的时间。

Figure 3. UAV 3D LiDAR system
图3. 无人机三维激光雷达系统
1) 一个具体的过程,包括步骤:① 在数据收集网站上;② 准备:在收到调查任务后,与自然环境、气候条件、调查网站的运输和通信条件、收集相关数据并制定网站工作计划的所有者进行充分沟通。③ 来自调查站的费用:在初步进行实地调查后,需要合理地确定调查站的位置,充分考虑到扫描效果,全面覆盖调查区域,确保调查区域数据的完整性,以及调查行政部门在该国的地位。这是对调查区域地形和地貌特征的调查考虑,例如大溪、深溪和干溪。受影响地区的两家银行,共有46个调查站沿河流进行了调查,以确保调查区域的充分覆盖,并确保任何潜在的调查区域都已覆盖。④ 调查前的目标:从调查站选择位置后,有必要进行调查区域调查,以充分确认调查站网站的有效性和可用性,并对衡量效果和覆盖率进行预判。⑤ 按区域进行区域调查:按区域进行区域调查,按区域进行形状调查东部调查站未完成所有已完成的调查站调查。您应该注意到,在对一个完整的站点进行扫描后,进行了初步测试,从测量所需数据到确保站点的所有数据都已被控制。⑥ 图像数据访问:在测量站点上,obtain需要图像数据。数据图像只能提供云解释点和目标的指示,但它还可以改进编辑效率记录和停止点云数据。它可以用来创建文本模型和提供原始数据来构建真实的3D虚拟现实模型。⑦ 数据点功能:主要/重要功能点和调查点的进一步协调和选举数据收集,用于后续数据处理和取证验证。数据收集的最后一步是验证所有测量数据,以确保数据的完整性和可用性。如果数据是完整性不足,则需要完整且可用的数据。
2) 数据处理
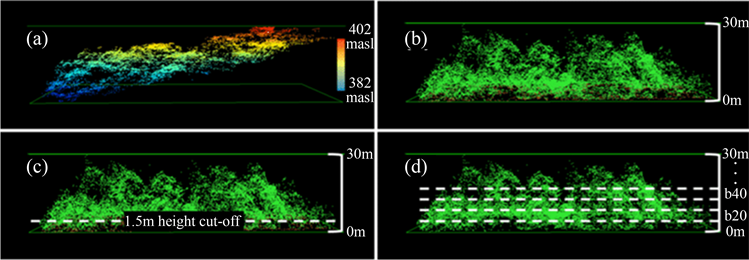
Figure 4. LiDAR point cloud data pre-processing. Note: (a) Raw LiDAR ground and vegetation points; (b) Normalized LiDAR points; (c) Height cut-off processing for the Normalized LiDAR points; (d) Layer of non-cumulative vegetation points
图4. LiDAR点云数据预处理。注:(a) 原始LiDAR地面和植被点;(b) 归一化LiDAR点;(c) 归一化LiDAR点的高度截断处理;(d) 非累积植被点层
地面3D激光雷达数据处理(图4)包括数据处理、连接点云、分类点云和数字结果生成。① 数据及其处理:由于大气和地表水的折射,通过激光雷达扫描地球获得的数据点云通常包含一些错误数据,称为点噪声。为了提高数据质量,降低建模的复杂性,提高模型构建的准确性和速度,必须消除和处理数据。数据设置方法包括手动选择和删除数据、过滤数据、数据同质化和减少数据碎片化。随着数据和算法处理的不断改进,数据自动化和处理变得越来越高。在这个项目中,数据由程序自动处理。② 云数据缝纫点:坐标系统工程中所谓的云数据缝纫点,用于确定每个位置的矩阵中心,包括通过转换协调、旋转和翻译下点坐标扫描仪技术坐标系统工程中的云。通过将区域重叠的信息、线路优势点功能和图像数据相结合,记录和划分从不同扫描表面和不同站点获得的数据。常见的方法包括自动链接和基于目标点的链接指南。由于距离测量站的距离相对较长,难以确定目标,识别率低,定位精度低,该项目主要依靠后视和定向相结合的方法。适应。③ 云数据分类点:使用专业软件对数据进行分类,完成自动提取、数据分类和过滤功能。通过人机交互,自动扫描和修改分类数据点云,以获得地球上真实的3D激光云数据点表面。④ 生成数字高程模型(Marka):基于从分类中获得的高分辨率点云数据和从该地区极低地形中提取的数据点功能,以提高准确性并构建网络不规则三角形,生成反映实体倒置悬崖的表面模型;数字高程模型(Marka)是在非三角形基础上创建的。⑤ 生成数字线性图(重新创建文件夹):基于图像数据、点云激光和数字高程模型,并构建相应的数字线性图。
(7)
采用上述公式求取数据的精度,以便符合实际研究的统一要求。
激光云高分辨率数据点,使用数字高程模型(Marka)获得的结果完成了高分辨率计算齿轮。通过优化项目设计,它减少了挖掘、填充和处置土壤,提供了平衡填充和挖掘的可能性,节省了项目实施成本,并具有传统测量的无与伦比的优势。该项目基于设计部门和数字高程模型,使用检查台计算方法,并以验证路障设计为代价,采用了大量的交通工程方法。结果表明,使用激光数字数据点云计算地面高度的齿轮尺寸;相对误差远低于使用传统方法计算的齿轮尺寸。地形特点是进出不良,容易形成死角测量。使用传统测量方法很难获得准确的地形数据。该项目不仅可以克服这些问题,还可以有效地获取数据,并使用数据处理软件从各种场景中获取测量结果。
5. 结论
激光雷达技术是一种高精度、高效率、非接触式三维测量技术,已经在测绘领域得到了广泛应用。激光雷达在测绘中的应用主要包括数字地形模型的制作、三维建模,载激光雷达设备航摄获取的点云数据,具有高精度的三维空间数据信息,通过对点云数据的处理与应用,为制作高精度DEM提供了一种新的技术手段。激光雷达测量结果能够满足不同用户的诸多需求,是各种特殊复杂条件地形测量的理想选择,本文通过介绍两种激光雷达技术具体应用,表明激光雷达测绘技术日渐成熟,在工程测绘中的应用给测绘的效率和质量的提高都带来了质的飞跃,也在一定程度上促进了我国工程测绘工作的快速发展。
文章引用
方炎林,吴涉成,陈 超,李佳艺. 工程测绘中的激光雷达技术应用与研究
Application and Research of LiDAR Technology in Engineering Mapping[J]. 应用物理, 2023, 13(05): 223-231. https://doi.org/10.12677/APP.2023.135026
参考文献
- 1. 金明. 激光雷达测绘技术应用[J]. 中国科技信息, 2023(7): 78-79.
- 2. 徐竭. 矿山工程测绘中激光雷达测绘技术探讨[J]. 四川建材, 2022, 48(3): 205-206.
- 3. 李文山, 吕小顺, 李亚宁, 栗智, 李轶波. 机载激光雷达在密林山区大比例尺测图的应用[J]. 西部资源, 2023(1): 192-194.
- 4. 张慧丽. 测绘新技术在煤矿巷道贯通测量中的应用分析[J]. 内蒙古煤炭经济, 2022(22): 51-53.
- 5. 王彬. 机载激光雷达在机场选址大比例尺地形图测绘中的应用[J]. 城市建设理论研究(电子版), 2022(33): 142-144.
- 6. 张钊, 周伟, 尚海兴, 贺春林, 张西龙. 机载激光雷达1:500地形图测绘理论与实践[J]. 西北水电, 2022(5): 123-127.
- 7. 刘海鹏. 基于机载激光雷达的滩涂测绘技术要点探析[J]. 西部资源, 2022(5): 109-111.
- 8. 熊威, 焦明东, 李云昊, 郭雷. 基于机载激光雷达的大比例尺地形图测绘应用实践[J]. 测绘与空间地理信息, 2022, 45(8): 237-239+244.
- 9. 崔宝牛, 聂越慧. 地面三维激光雷达在坝区地形测量中的应用研究[J]. 工程与建设, 2022, 36(3): 619-620+672.
- 10. 江木春, 韩亚民, 林剑锋. 无人机机载激光雷达测绘技术在航道整治工程中的应用[J]. 水运工程, 2022(4): 157- 160+165.