设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投稿
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
AdvancesinAppliedMathematics
A^
ê
Æ
?
Ð
,2023,12(3),1215-1223
PublishedOnlineMarch2023inHans.https://www.hanspub.org/journal/aam
https://doi.org/10.12677/aam.2023.123123
ä
k
ð
½
N
þ
;
J
¤
Filippov
Ó
ö
-
.
Û
Ä
å
Æ
ööö
ëëë
§§§
±±±
•
â
n
ó
Œ
Æ
ê
Æ
†
Ú
O
Æ
§
H
•
â
Â
v
F
Ï
µ
2023
c
2
21
F
¶
¹
^
F
Ï
µ
2023
c
3
20
F
¶
u
Ù
F
Ï
µ
2023
c
3
27
F
Á
‡
©
ï
Ä
˜
a
ä
k
ð
½
N
þ
;
J
¤
Filippov
Ó
ö
-
.
"
A^
Filippov
•{
ï
Ä
.
w
Ä
å
Æ
§
¿
?
˜
Ú
ï
Ä
.
Û
Ä
å
Æ
"
y
²
X
Ú
•
3
•
˜
²
ï
§
…
T
²
ï
´
Û
ì
C
-
½
"
(
J
L
²
§
ï
á
·
N
þ
;
J
¤
k
|
u
‘
±
Ó
ö
†
Ó
ö
ƒ
m
²
ï
"
'
…
c
Ó
ö
-
X
Ú
§
;
J
¤
§
²
ï
:
§
-
½
5
GlobalDynamicsofaFilippov
Predator-PreyModelwitha
Constant-CapacityRefuge
ShaJiang,PeiZhou
SchoolofMathematicsandStatistics,ChangshaUniversityofScienceandTechnology,Changsha
Hunan
Received:Feb.21
st
,2023;accepted:Mar.20
th
,2023;published:Mar.27
th
,2023
©
Ù
Ú
^
:
ö
ë
,
±
.
ä
k
ð
½
N
þ
;
J
¤
ilippov
Ó
ö
-
.
Û
Ä
å
Æ
[J].
A^
ê
Æ
?
Ð
,2023,12(3):
1215-1223.DOI:10.12677/aam.2023.123123
ö
ë
§
±
Abstract
Inthispaper,apredator-preymodelwithaconstant-capacityrefugeisstudied.We
applyFilippovmethodtostudytheslidingmodedynamicsofthemodel,andstudied
theglobaldynamicsfurtherly.Itisprovedthatthereexistsauniqueequilibriumand
theequilibriumisgloballyasymptoticallystable.Theresultsshowthattheestab-
lishmentofarefugewithappropriatecapacityisbeneficialtomaintainthebalance
betweenpredatorandprey.
Keywords
Predator
õõõ
PreyModel,Refuge,Equilibrium,Stability
Copyright
c
2023byauthor(s)andHansPublishersInc.
This work is licensed undertheCreative Commons Attribution InternationalLicense(CCBY4.0).
http://creativecommons.org/licenses/by/4.0/
1.
Ú
ó
3
g
,
.
¥
§
)
¹
3
Ó
˜
/
•
Ô
«ƒ
m
•
)
•
?
1
X
í
¤
Ì
.
Ô
ó
´)
X
Ú
Ä
(
§
´
d
«
+
•
Ï
u
Ð
Ú
?
z
/
¤
.
~
X
§
H
Ú
3
Ó
‚
¸
¥
§
‚
¸
¥
ú
„
j
ž
§
Ô
¿
v
§
Ï
d
m
©
Œ
þ
„
ˆ
.
du
ê
þ
O
\
§
H
k
¿
v
Ô
§
u
´
H
m
©
Œ
þ
„
ˆ
.
H
ê
þ
O
\
§
o
ê
þ
du
¯
Å
ì~
§
Ï
d
H
Ô
~
±
–
u
H
ê
þ
~
.
ù
‡
ž
ÿ
§
S
5
J
p
§
¤
±
o
ê
q
m
©
O
\
§
-
E
ù
‡
L
§
§
†
ˆ
²
ï
.
é
þ
ã
y–
§
¿
Œ
|
Í
¶
)
Ô
ê
Æ
[
Volterra
ï
á
X
e
ê
Æ
.
[1][2][3]:
(
˙
x
=
rx
−
cxy
˙
y
=
βxy
−
dy.
b
x
´
—
Ý
§
y
´
Ó
ö
—
Ý
.
Ù
¥
r
´
Ñ
)
Ç
§
β
L
«
Ó
¼
=
z
•
#
Ó
ö
Ç
§
d
L
«
Ó
ö
k
Ç
§
Ó
ö
ê
þ
:
ì
O
\
ž
§
é
%
•
¬
‘
ƒ
O
\
.
•
y
«
+
Ø
à
k
§
<
a
m
©
Z
ý
§
•
ï
á
;
J
¤
´
˜
«
k
“
Ž
«
ý
•{
.
C
c
5
§
<
‚
‰
Œ
þ
ó
Š
5
ï
Ä
;
J
¤
K
•
§
X
©
z
[3][4][5]
§
Š
ö
J
Ñ
ä
k
ð
½
'
~
N
þ
Ô
;
J
¤
Lotka-Volterra
Ó
ö
.
.
3
ë
•
©
z
[6][7][8]
¥
§
ï
Ä
DOI:10.12677/aam.2023.1231231216
A^
ê
Æ
?
Ð
ö
ë
§
±
HollingII
.
Ú
k
;
J
¤
Ó
ö
-
X
Ú
Ä
å
Æ1
•
.
3
©
¥
§
·
‚
±
—
Ý
Š
•
K
Š
5
©
Û
±
e
.
[4][9][10]:
(
˙
x
=
rx
1
−
x
K
−
c
(
x
−
εR
)
y
˙
y
=
β
(
x
−
εR
)
y
−
dy,
(1.1)
Ù
¥
K
•
Ù
«
1
U
å
§
K>R
Ú
K>σ
§
R
´
;
J
¤¤
U
N
B
•
Œ
N
þ
.
ε
=
(
0
,x>σ,
1
,x<σ,
(1.2)
´
›
›
¼
ê
§
σ>
0
L
«
K
Š
.
—
Ý
p
u
σ
ž
§
Ø
I
‡
æ
›
›
„
–
.
,
§
˜
—
Ý$
u
K
Š
σ
§
Ò
A
T
á
=
‹
m
;
J
¤
5
o
.
©
Ù
{
Ü
©
|
„
X
e
µ
3
1
!
§
·
‚
‰
Ñ
Filippov
X
Ú
˜
½
Â
Ú
5
Ÿ
¶
1
n
!
©
Û
w
•
3
5
Ú
Ä
å
Æ
©
Û
¶
3
1
o
!
¥
§
y
²
²
ï
:
Û
-
½
5
§
¿
‰
Ñ
ê
Š
[
ã
¶
•
§
3
1
Ê
Ü
©
Ñ
(
Ø
.
2.
.
0
9
ý
•
£
3ù
˜
!
¥
§
·
‚
‰
Ñ
©
¤
I
‡
Filippov
X
Ú
˜
½
Â
Ú
5
Ÿ
.
•
õ
[
!
ž
ë
•
[11][12][13][14].
(
x,y
)
∈
R
2
+
§
·
‚
ò
R
2
+
©
¤
±
e
n
Ü
©
µ
G
1
=
(
x,y
)
∈
R
2
+
:
x>σ
,
G
2
=
(
x,y
)
∈
R
2
+
:
x<σ
,
Ω =
(
x,y
)
∈
R
2
+
:
x
=
σ
,
·
‚
À
J
n
= (1
,
0)
Š
•
{
•
þ
.
w
,
§
X
Ú
(1.1)
d
ü
‡
f
X
Ú
|
¤
˙
x
=
rx
1
−
x
K
−
cxy
˙
y
=
βxy
−
dy
(2.1)
˙
x
=
rx
1
−
x
K
−
cx
−
Ry
˙
y
=
βx
−
Ry
−
dy
(2.2)
du
X
Ú
(1.1)
m
ý
Ø
ë
Y5
§
©
½
Â
Filippov
¿Â
Fili
e
(1.1)
)
.
co[
φ
(
I
)]
•
φ
(
I
)
à
4
•
§
@
o
co
[
φ
(
I
)] = [
φ
(
I
−
)
,φ
(
I
+
)]
§
Ù
¥
φ
(
I
−
)
Ú
φ
(
I
+
)
©
OL
«
φ
3
I
?
†
m
4
•
.
e
5
§
·
‚
©
O
ï
Ä
f
X
Ú
Û
Ä
å
Æ
.
Ä
k
3
G
1
¥
§
w
,
X
Ú
(2.1)
o
´
k
ü
‡
>
.
²
ï
:
(0
,
0)
Ú
(
K,
0).
d
§
(0
,
0)
©
ª
´
˜
‡
Q
:
.
X
J
βK<d
§
K
(
K,
0)
´
˜
‡
-
½
(
:
§
X
J
βK>d
§
K
§
´
˜
‡
Q
:
.
βK>d
ž
§
DOI:10.12677/aam.2023.1231231217
A^
ê
Æ
?
Ð
ö
ë
§
±
(2.1)
k
•
˜
²
ï
:
E
1
= (
x
∗
1
,y
∗
1
) =
d
β
,
rβK
−
rd
cβK
§
§
•
3
ž
§
ù
´
˜
‡
-
½
:
½
(
:
.
e
5
3
G
2
¥
§
w
,
X
Ú
(2.2)
•
o
´
k
ü
‡
>
.
²
ï
:
(0
,
0)
Ú
(
K,
0).(0
,
0)
©
ª
´
˜
‡
Q
:
.
X
J
βK<d
+
βR
§
K
(
K,
0)
´
˜
‡
-
½
(
:
§
X
J
βK>d
+
βR
§
K
§
´
˜
‡
Q
:
"
βK>d
+
βR
ž
§
(2.2)
•
k
•
˜
²
ï
:
E
2
= (
x
∗
2
,y
∗
2
) =
βR
+
d
β
,
r
[(
βR
+
d
)(
βK
−
βR
−
d
)]
βKcd
.
§
•
3
ž
§
ù
´
˜
‡
-
½
:
½
(
:
.
·
K
2.1.
b
(
x
(
t
)
,y
(
t
))
•
.
(1.1)
3
«
m
[0
,T
)
,
T
∈
(0
,
+
∞
)
þ
÷
v
Ð
©
^
‡
x
(0)=
x
0
>
0
Ú
y
(0) =
y
0
>
0
)
§
K
é
¤
k
t
∈
[0
,T
)
k
x
(
t
)
>
0
…
y
(
t
)
>
0
.
y
²
.
d
‡
y
{
y
²
y
(
t
)
>
0
.
b
•
3
t
0
¦
y
(
t
0
)
≤
0
§
@
o
•
3
t
∗
>
0
÷
v
y
(
t
∗
) =0
¿
…
é
u
¤
k
t
∈
[0
,t
∗
)
k
y
(
t
)
>
0
.
•
Ä
.
(1.1)
1
‡
•
§
§
·
‚
é
¤
k
t
∈
[0
,t
∗
)
k
d
y
d
t
=
y
[
β
(
x
−
εR
)
−
d
]
,
¤
±
y
(
t
∗
) =
y
(0)
e
R
t
∗
0
[
β
(
x
(
s
)
−
εR
)
−
d
]
ds
>
0
,
§
Ú
y
(
t
∗
) = 0
g
ñ
.
e
5
d
.
(1.1)
1
˜
‡
•
§
§
X
J
3
x
=0
?
Œ
d
x
d
t
=
εcRy
≥
0
§
Ï
•
®
y
y
(
t
)
>
0
§
K
d
x
(0)
>
0
Œ
•
x
(
t
)
>
0
.
y
.
.
2
·
K
2.2.
b
(
x
(
t
)
,y
(
t
))
•
.
(1.1)
)
§
Ù
¥
é
¤
k
t
∈
[0
,
+
∞
)
k
x
(0) =
x
0
>
0
Ú
y
(0) =
y
0
>
0
.
K
)
(
x
(
t
)
,y
(
t
))
3
t
∈
[0
,
+
∞
)
þ
k
.
.
y
²
.
5
¿
dx
dt
x
=
K
=
−
c
(
K
−
εR
)
y<
0
,
dx
dt
x>K
<
0
.
Ï
d
é
(2.1)
z
‡
)
(
x
(
t
)
,y
(
t
))
§
•
3
˜
‡
T>
0
§
é
u
t
≥
T
¦
x
(
t
)
<K
.
K
é
t
≥
T
§
·
‚
k
d
x
(
t
)+
c
β
y
(
t
)
dt
=
rx
1
−
x
K
−
cd
β
y
≤
rK
1
−
x
K
−
cd
β
y
=
rK
−
rx
+
cd
β
y
≤
rK
−
min
{
r,c
}
x
(
t
)+
d
β
y
(
t
)
„
Ì
lim
t
→∞
sup
x
(
t
)+
c
β
y
(
t
)
≤
rK
min
{
r,c
}
§
Ï
d
)
3
t
∈
[0
,
+
∞
)
þ
k
.
.
2
·
K
2.3.
X
Ú
(2.1)
Ú
(2.2)
©
O
k
˜
‡
Û
ì
C
-
½
²
ï
:
E
1
,E
2
.
y
²
.
E
Dulac
¼
ê
•
B
=
1
xy
§
K
∂
(
Bf
i
1
)
∂x
+
∂
(
Bf
i
2
)
∂y
<
0
,
Š
â
Bendixson
−
Dulac
{
K
•
X
Ú
(2.1)
Ú
(2.2)
Ø
•
3
4
•
‚
"
Ï
d
²
ï
:
E
1
,E
2
Û
ì
C
-
DOI:10.12677/aam.2023.1231231218
A^
ê
Æ
?
Ð
ö
ë
§
±
½
"
2
3.
w
•
3
5
9
Ù
Ä
å
Æ
!
·
‚
Ä
k
?
Ø
w
•
3
5
§
,
ï
Ä
Ù
Ä
å
Æ1
•
.
d
h
n
1
,F
1
i
= 0
,
h
n
1
,F
2
i
= 0
.
Œ
-
T
1
:=
r
(
K
−
σ
)
cK
§
T
2
:=
rσ
(
K
−
σ
)
cK
(
σ
−
R
)
§
Ù
¥
K>σ
.
σ>R
ž
§
d
h
n
1
,F
1
i≤
0
h
n
1
,F
2
i≥
0
§
X
Ú
(2.1)
3
Ω
þ
w
«
•
µ
Σ
s
1
⊂
Ω =
(
x,y
)
∈
Ω;
T
1
≤
y
≤
T
2
.
σ
≤
R
ž
§
X
Ú
(2.1)
3
Ω
þ
w
«
•
µ
Σ
s
2
⊂
Ω =
(
x,y
)
∈
Ω;
T
1
≤
y
.
Š
â
Filippov
à
•{
x
0
(
t
)
y
0
(
t
)
!
=
λF
1
+(1
−
λ
)
F
2
w
•
§
•
f
(
y
) =
βrσ
(
K
−
σ
)
cK
−
dy.
(3.1)
X
Ú
•
3
•
˜˜
‡
²
ï
)
E
p
=
σ,y
∗
p
§
Ù
¥
y
∗
p
=
βrσ
(
K
−
σ
)
cKd
§
σ>R
ž
§
…
=
T
1
≤
y
∗
p
≤
T
2
ž
§
3
Σ
s
1
⊂
Ω
þ
•
3
•
˜
–
²
ï
:
E
p
.
σ
≤
R
ž
§
…
=
T
1
≤
y
∗
p
ž
§
3
Σ
s
2
⊂
Ω
þ
•
3
•
˜
–
²
ï
:
E
p
.
d
∂
∂y
βrσ
(
K
−
σ
)
ck
−
dy
E
p
=
−
d<
0
ù
L
²
)
´
á
Ú
§
•
Ò
´
`
§
–
²
ï
E
p
•
3
ž
§
§
´
Û
ì
C
-
½
.
4.
Û
Ä
å
Æ
Ú
n
4.1.
X
Ú
(2.1)
Ø
•
3
Œ
7
w
Σ
s
4
;
.
y
²
.
e
¡
·
‚
æ
^
‡
y
{
5
y
²
.
b
•
3
˜
‡
•
¹
Σ
s
4
•
‚
Γ
.
X
ã
1
¤
«
§
P4
•
‚
†
6
/
þ
e
:
©
O
•
N
Ú
M
§
4
•
‚
†
x
=
σ
+
δ
þ
e
:
©
O
•
N
1
=
N
−
δ
Ú
M
1
=
M
+
δ
§
Ó
ž
§
P4
•
‚
†
x
=
σ
−
δ
þ
e
:
©
O
•
N
2
=
N
−
δ
Ú
M
2
=
M
+
δ
§
Ù
¥
δ>
0
¿
©
.
d
÷
v
lim
δ
→
0
M
i
=
M,
lim
δ
→
0
N
i
=
N
(
i
= 1
,
2)
.
-
∂D
1
L
«
Γ
1
Ú
N
1
M
1
¤
Œ
¤
«
•
D
1
>
.
§
∂D
2
L
«
Γ
2
Ú
M
2
N
2
¤
Œ
¤
«
•
D
2
>
.
.
À
J
Dulac
¼
ê
•
B
=
1
xy
§
ZZ
D
∂
(
BF
1
)
∂x
+
∂
(
BF
2
)
∂y
d
x
d
y
=
2
X
i
=1
ZZ
D
i
∂
(
Bf
i
1
)
∂x
+
∂
(
Bf
i
2
)
∂y
d
x
d
y<
0
.
(4.1)
DOI:10.12677/aam.2023.1231231219
A^
ê
Æ
?
Ð
ö
ë
§
±
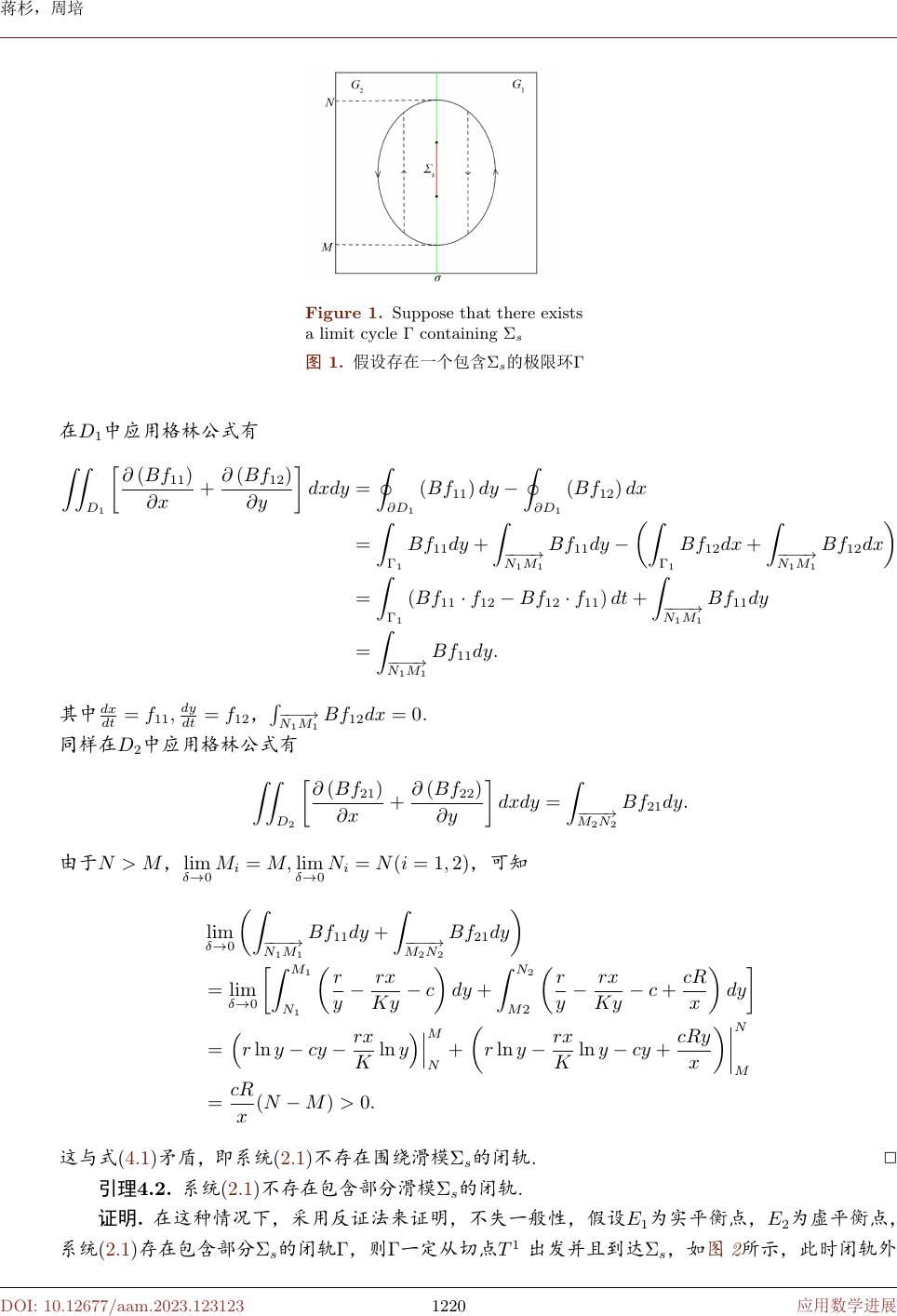
Figure1.
Supposethatthereexists
alimitcycleΓcontainingΣ
s
ã
1.
b
•
3
˜
‡
•
¹
Σ
s
4
•
‚
Γ
3
D
1
¥
A^
‚
ú
ª
k
ZZ
D
1
∂
(
Bf
11
)
∂x
+
∂
(
Bf
12
)
∂y
dxdy
=
I
∂D
1
(
Bf
11
)
dy
−
I
∂D
1
(
Bf
12
)
dx
=
Z
Γ
1
Bf
11
dy
+
Z
−−−−→
N
1
M
1
Bf
11
dy
−
Z
Γ
1
Bf
12
dx
+
Z
−−−−→
N
1
M
1
Bf
12
dx
=
Z
Γ
1
(
Bf
11
·
f
12
−
Bf
12
·
f
11
)
dt
+
Z
−−−−→
N
1
M
1
Bf
11
dy
=
Z
−−−−→
N
1
M
1
Bf
11
dy.
Ù
¥
dx
dt
=
f
11
,
dy
dt
=
f
12
§
R
−−−−→
N
1
M
1
Bf
12
dx
= 0
.
Ó
3
D
2
¥
A^
‚
ú
ª
k
ZZ
D
2
∂
(
Bf
21
)
∂x
+
∂
(
Bf
22
)
∂y
dxdy
=
Z
−−−−→
M
2
N
2
Bf
21
dy.
du
N>M
§
lim
δ
→
0
M
i
=
M,
lim
δ
→
0
N
i
=
N
(
i
= 1
,
2)
§
Œ
•
lim
δ
→
0
Z
−−−−→
N
1
M
1
Bf
11
dy
+
Z
−−−−→
M
2
N
2
Bf
21
dy
=lim
δ
→
0
Z
M
1
N
1
r
y
−
rx
Ky
−
c
dy
+
Z
N
2
M
2
r
y
−
rx
Ky
−
c
+
cR
x
dy
=
r
ln
y
−
cy
−
rx
K
ln
y
M
N
+
r
ln
y
−
rx
K
ln
y
−
cy
+
cRy
x
N
M
=
cR
x
(
N
−
M
)
>
0
.
ù
†
ª
(4.1)
g
ñ
§
=
X
Ú
(2.1)
Ø
•
3
Œ
7
w
Σ
s
4
;
.
2
Ú
n
4.2.
X
Ú
(2.1)
Ø
•
3
•
¹
Ü
©
w
Σ
s
4
;
.
y
²
.
3ù
«
œ
¹
e
§
æ
^
‡
y
{
5
y
²
§
Ø
”
˜
„
5
§
b
E
1
•
¢
²
ï
:
§
E
2
•
J
²
ï
:
§
X
Ú
(2.1)
•
3
•
¹
Ü
©
Σ
s
4
;
Γ
§
K
Γ
˜
½
l
ƒ
:
T
1
Ñ
u
¿
…
ˆ
Σ
s
§
X
ã
2
¤
«
§
d
ž
4
;
DOI:10.12677/aam.2023.1231231220
A^
ê
Æ
?
Ð
ö
ë
§
±
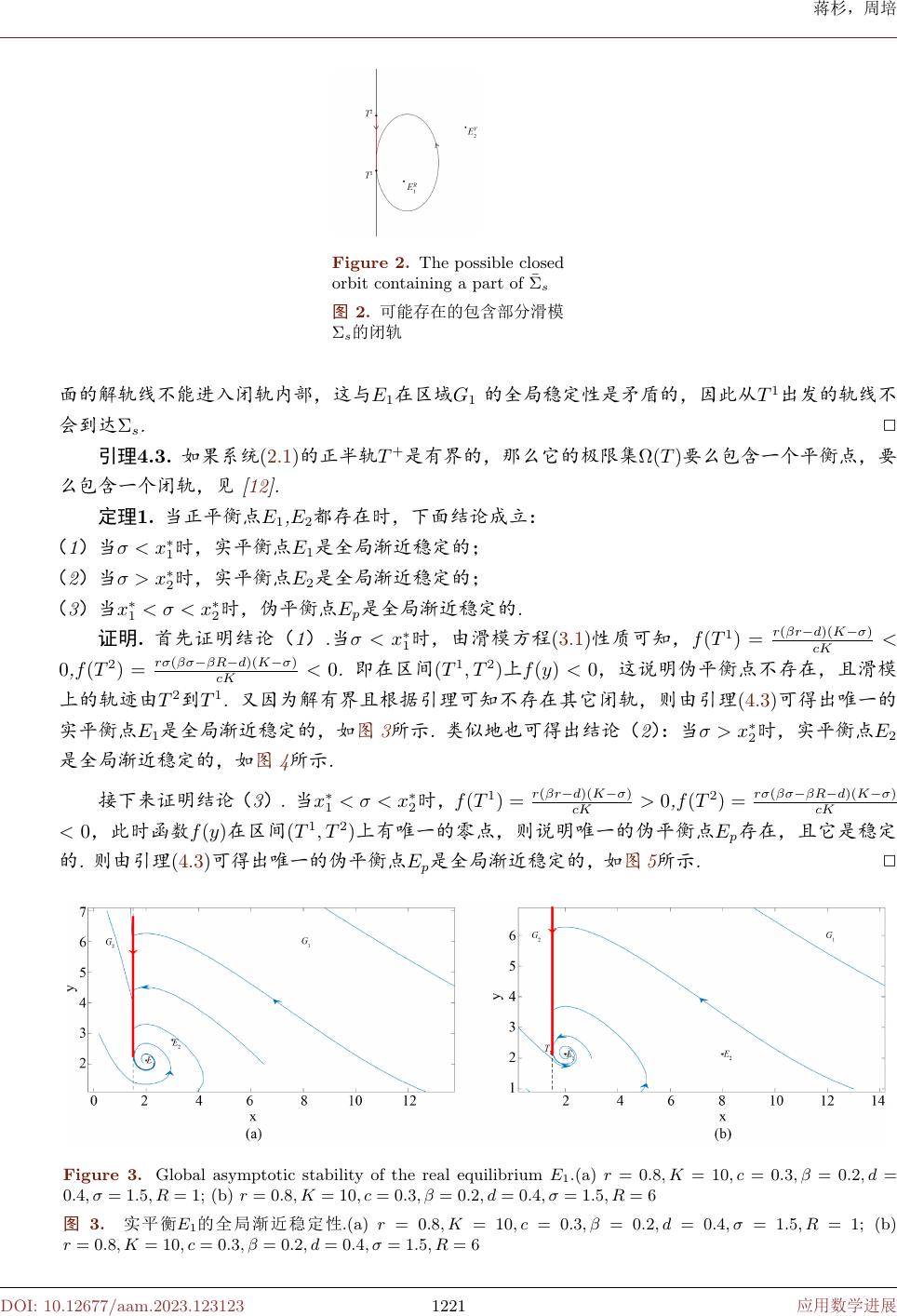
Figure2.
Thepossibleclosed
orbitcontainingapartof
¯
Σ
s
ã
2.
Œ
U
•
3
•
¹
Ü
©
w
Σ
s
4
;
¡
)
;
‚
Ø
U
?
\
4
;
S
Ü
§
ù
†
E
1
3
«
•
G
1
Û
-
½
5
´
g
ñ
§
Ï
dl
T
1
Ñ
u
;
‚
Ø
¬
ˆ
Σ
s
.
2
Ú
n
4.3.
X
J
X
Ú
(2.1)
Œ
;
T
+
´
k
.
§
@
o
§
4
•
8
Ω(
T
)
‡
o
•
¹
˜
‡
²
ï
:
§
‡
o
•
¹
˜
‡
4
;
§
„
[12].
½
n
1.
²
ï
:
E
1
,
E
2
Ñ
•
3
ž
§
e
¡
(
Ø
¤
á
µ
£
1
¤
σ<x
∗
1
ž
§
¢
²
ï
:
E
1
´
Û
ì
C
-
½
¶
£
2
¤
σ>x
∗
2
ž
§
¢
²
ï
:
E
2
´
Û
ì
C
-
½
¶
£
3
¤
x
∗
1
<σ<x
∗
2
ž
§
–
²
ï
:
E
p
´
Û
ì
C
-
½
.
y
²
.
Ä
k
y
²
(
Ø
£
1
¤
.
σ<x
∗
1
ž
§
d
w
•
§
(3.1)
5
Ÿ
Œ
•
§
f
(
T
1
)=
r
(
βr
−
d
)(
K
−
σ
)
cK
<
0
,
f
(
T
2
)=
rσ
(
βσ
−
βR
−
d
)(
K
−
σ
)
cK
<
0
.
=
3
«
m
(
T
1
,T
2
)
þ
f
(
y
)
<
0
§
ù
`
²
–
²
ï
:
Ø
•
3
§
…
w
þ
;
,
d
T
2
T
1
.
q
Ï
•
)
k
.
…
Š
â
Ú
n
Œ
•
Ø
•
3
Ù
§
4
;
§
K
d
Ú
n
(4.3)
Œ
Ñ
•
˜
¢
²
ï
:
E
1
´
Û
ì
C
-
½
§
X
ã
3
¤
«
.
a
q
/
•
Œ
Ñ
(
Ø
£
2
¤µ
σ>x
∗
2
ž
§
¢
²
ï
:
E
2
´
Û
ì
C
-
½
§
X
ã
4
¤
«
.
e
5
y
²
(
Ø
£
3
¤
.
x
∗
1
<σ<x
∗
2
ž
§
f
(
T
1
) =
r
(
βr
−
d
)(
K
−
σ
)
cK
>
0
,
f
(
T
2
) =
rσ
(
βσ
−
βR
−
d
)(
K
−
σ
)
cK
<
0
§
d
ž
¼
ê
f
(
y
)
3
«
m
(
T
1
,T
2
)
þ
k
•
˜
"
:
§
K
`
²
•
˜
–
²
ï
:
E
p
•
3
§
…
§
´
-
½
.
K
d
Ú
n
(4.3)
Œ
Ñ
•
˜
–
²
ï
:
E
p
´
Û
ì
C
-
½
§
X
ã
5
¤
«
.
2
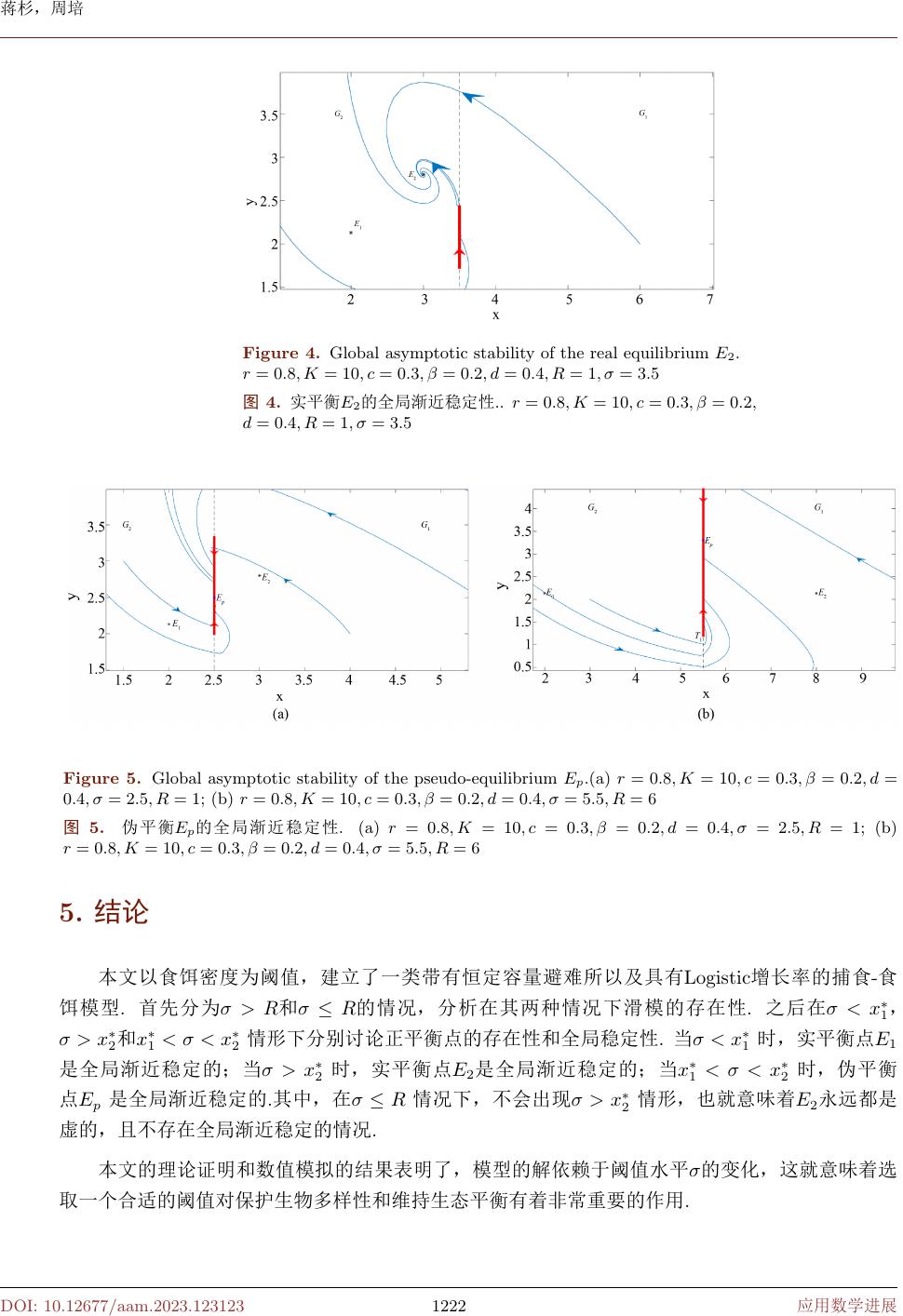
Figure3.
Globalasymptoticstabilityoftherealequilibrium
E
1
.(a)
r
=0
.
8
,K
=10
,c
=0
.
3
,β
=0
.
2
,d
=
0
.
4
,σ
= 1
.
5
,R
= 1;(b)
r
= 0
.
8
,K
= 10
,c
= 0
.
3
,β
= 0
.
2
,d
= 0
.
4
,σ
= 1
.
5
,R
= 6
ã
3.
¢
²
ï
E
1
Û
ì
C
-
½
5
.(a)
r
=0
.
8
,K
=10
,c
=0
.
3
,β
=0
.
2
,d
=0
.
4
,σ
=1
.
5
,R
=1;(b)
r
= 0
.
8
,K
= 10
,c
= 0
.
3
,β
= 0
.
2
,d
= 0
.
4
,σ
= 1
.
5
,R
= 6
DOI:10.12677/aam.2023.1231231221
A^
ê
Æ
?
Ð
ö
ë
§
±
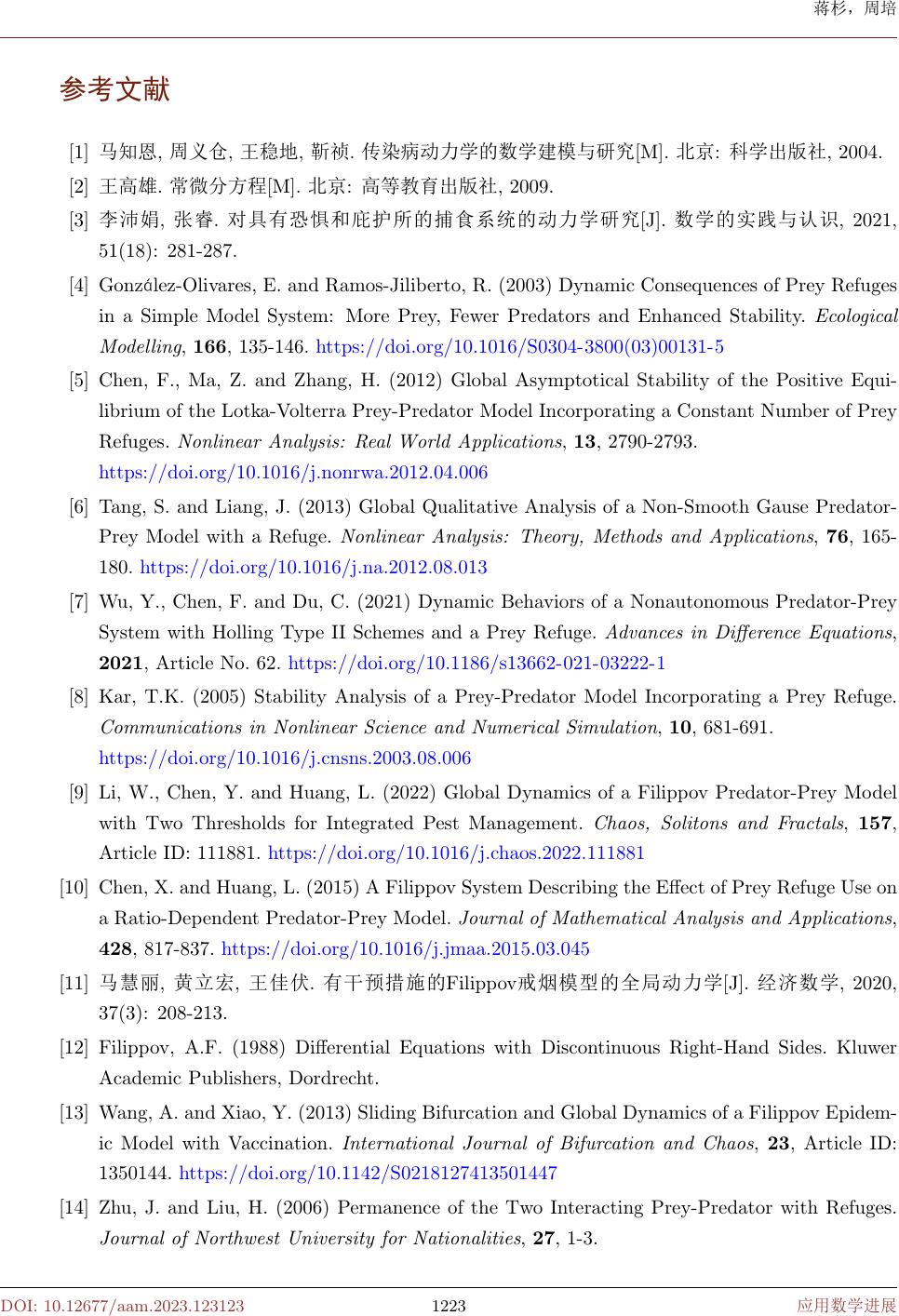
Figure4.
Globalasymptoticstabilityoftherealequilibrium
E
2
.
r
= 0
.
8
,K
= 10
,c
= 0
.
3
,β
= 0
.
2
,d
= 0
.
4
,R
= 1
,σ
= 3
.
5
ã
4.
¢
²
ï
E
2
Û
ì
C
-
½
5
..
r
= 0
.
8
,K
= 10
,c
= 0
.
3
,β
= 0
.
2
,
d
= 0
.
4
,R
= 1
,σ
= 3
.
5
Figure5.
Globalasymptoticstabilityofthepseudo-equilibrium
E
p
.(a)
r
= 0
.
8
,K
=10
,c
=0
.
3
,β
= 0
.
2
,d
=
0
.
4
,σ
= 2
.
5
,R
= 1;(b)
r
= 0
.
8
,K
= 10
,c
= 0
.
3
,β
= 0
.
2
,d
= 0
.
4
,σ
= 5
.
5
,R
= 6
ã
5.
–
²
ï
E
p
Û
ì
C
-
½
5
.(a)
r
=0
.
8
,K
=10
,c
=0
.
3
,β
=0
.
2
,d
=0
.
4
,σ
=2
.
5
,R
=1;(b)
r
= 0
.
8
,K
= 10
,c
= 0
.
3
,β
= 0
.
2
,d
= 0
.
4
,σ
= 5
.
5
,R
= 6
5.
(
Ø
©
±
—
Ý
•
K
Š
§
ï
á
˜
a
‘
k
ð
½
N
þ
;
J
¤
±
9
ä
k
Logistic
O
•
Ç
Ó
-
.
.
Ä
k
©
•
σ>R
Ú
σ
≤
R
œ
¹
§
©
Û
3
Ù
ü
«
œ
¹
e
w
•
3
5
.
ƒ
3
σ<x
∗
1
§
σ>x
∗
2
Ú
x
∗
1
<σ<x
∗
2
œ
/
e
©
O
?
Ø
²
ï
:
•
3
5
Ú
Û
-
½
5
.
σ<x
∗
1
ž
§
¢
²
ï
:
E
1
´
Û
ì
C
-
½
¶
σ>x
∗
2
ž
§
¢
²
ï
:
E
2
´
Û
ì
C
-
½
¶
x
∗
1
<σ<x
∗
2
ž
§
–
²
ï
:
E
p
´
Û
ì
C
-
½
.
Ù
¥
§
3
σ
≤
R
œ
¹
e
§
Ø
¬
Ñ
y
σ>x
∗
2
œ
/
§
•
Ò
¿
›
X
E
2
[
Ñ
´
J
§
…
Ø
•
3
Û
ì
C
-
½
œ
¹
.
©
n
Ø
y
²
Ú
ê
Š
[
(
J
L
²
§
.
)
•
6
u
K
Š
Y
²
σ
C
z
§
ù
Ò
¿
›
X
À
˜
‡
Ü
·
K
Š
é
o
)
Ô
õ
5
Ú
‘
±
)
²
ï
k
X
š
~
-
‡
Š
^
.
DOI:10.12677/aam.2023.1231231222
A^
ê
Æ
?
Ð
ö
ë
§
±
ë
•
©
z
[1]
ê
•
,
±
Â
ó
,
-
/
,
@
.
D
/
¾
Ä
å
Æ
ê
Æ
ï
†
ï
Ä
[M].
®
:
‰
Æ
Ñ
‡
,2004.
[2]
p
<
.
~
‡
©•
§
[M].
®
:
p
˜
Ñ
‡
,2009.
[3]
o
ï
,
Ü
H
.
é
ä
k
™
ê
Ú
2
o
¤
Ó
X
Ú
Ä
å
Æï
Ä
[J].
ê
Æ
¢
‚
†
@
£
,2021,
51(18):281-287.
[4]Gonz
S
lez-Olivares,E. andRamos-Jiliberto,R. (2003)Dynamic ConsequencesofPrey Refuges
inaSimpleModelSystem:MorePrey,FewerPredatorsandEnhancedStability.
Ecological
Modelling
,
166
,135-146.https://doi.org/10.1016/S0304-3800(03)00131-5
[5]Chen,F.,Ma,Z.andZhang,H.(2012)GlobalAsymptoticalStabilityofthePositiveEqui-
libriumofthe Lotka-VolterraPrey-Predator ModelIncorporatingaConstantNumberofPrey
Refuges.
NonlinearAnalysis:RealWorldApplications
,
13
,2790-2793.
https://doi.org/10.1016/j.nonrwa.2012.04.006
[6]Tang,S.andLiang,J.(2013)GlobalQualitativeAnalysisofaNon-SmoothGausePredator-
PreyModelwithaRefuge.
NonlinearAnalysis:Theory,MethodsandApplications
,
76
,165-
180.https://doi.org/10.1016/j.na.2012.08.013
[7]Wu,Y.,Chen,F.andDu,C.(2021)DynamicBehaviorsofaNonautonomousPredator-Prey
SystemwithHollingTypeIISchemesandaPreyRefuge.
AdvancesinDifferenceEquations
,
2021
,ArticleNo.62.https://doi.org/10.1186/s13662-021-03222-1
[8]Kar,T.K.(2005)StabilityAnalysisofaPrey-PredatorModelIncorporatingaPreyRefuge.
CommunicationsinNonlinearScienceandNumericalSimulation
,
10
,681-691.
https://doi.org/10.1016/j.cnsns.2003.08.006
[9]Li,W.,Chen,Y.andHuang,L.(2022)GlobalDynamicsofaFilippovPredator-PreyModel
withTwoThresholdsforIntegratedPestManagement.
Chaos,SolitonsandFractals
,
157
,
ArticleID:111881.https://doi.org/10.1016/j.chaos.2022.111881
[10]Chen, X. and Huang, L. (2015) AFilippovSystem Describing the Effectof Prey Refuge Use on
a Ratio-Dependent Predator-PreyModel.
JournalofMathematicalAnalysisandApplications
,
428
,817-837.https://doi.org/10.1016/j.jmaa.2015.03.045
[11]
ê
¦
w
,
‘
á
÷
,
Z
Ï
.
k
Z
ý
„
–
Filippov
+
ë
.
Û
Ä
å
Æ
[J].
²
L
ê
Æ
,2020,
37(3):208-213.
[12]Filippov,A.F.(1988)DifferentialEquationswithDiscontinuousRight-HandSides.Kluwer
AcademicPublishers,Dordrecht.
[13]Wang,A.and Xiao,Y.(2013) SlidingBifurcation andGlobal Dynamicsof aFilippov Epidem-
icModelwithVaccination.
InternationalJournalofBifurcationandChaos
,
23
,ArticleID:
1350144.https://doi.org/10.1142/S0218127413501447
[14]Zhu,J.andLiu,H.(2006)PermanenceoftheTwoInteractingPrey-PredatorwithRefuges.
JournalofNorthwestUniversityforNationalities
,
27
,1-3.
DOI:10.12677/aam.2023.1231231223
A^
ê
Æ
?
Ð