设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投稿
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
PureMathematics
n
Ø
ê
Æ
,2023,13(4),902-916
PublishedOnlineApril2023inHans.https://www.hanspub.org/journal/pm
https://doi.org/10.12677/pm.2023.134096
ä
k
'
~
Ô
;
J
¤
HollingI
.
Ó
-
.
Û
Ä
å
Æ
ÛÛÛ
ûûû
•
â
n
ó
Œ
Æ
ê
Æ
†
Ú
O
Æ
§
H
•
â
Â
v
F
Ï
µ
2023
c
3
18
F
¶
¹
^
F
Ï
µ
2023
c
4
19
F
¶
u
Ù
F
Ï
µ
2023
c
4
26
F
Á
‡
3
©
¥
§
Ï
L
Ú
\
K
Š
ü
Ñ
§
ï
Ä
˜
a
ä
k
'
~
Ô
;
J
¤
HollingI
.
Ó
-
.
¿
é
Ù
?
1
Û
©
Û
§
±
(
½
.
Û
Ä
å
Æ
"
y
|
^
Filippov
n
Ø
§
Lyapunov
¼
ê
{
Ú
‚
ú
ª
•{
§
3
ü
‡
f
X
Ú
Û
Ä
å
Æ
Ä
:
þ
§
é
K
Š
ü
Ñ
e
Ó
-
.
§
·
‚
ï
Ä
Ù
w
Ä
å
Æ
Ú
Û
Ä
å
Æ
"
•
Ï
L
ê
Š
[
é
n
Ø
(
J
?
1
y
"
'
…
c
š
1
w
X
Ú
§
Ó
-
.
§
Ø
ë
Y
§
²
ï
:
§
-
½
5
GlobalDynamicsofHollingTypeI
Predator-PreyModelwithEqual
ProportionofPreyRefuge
DanLuo
SchoolofMathematicsandStatistics,ChangshaUniversityofScienceandTechnology,Changsha
Hunan
Received:Mar.18
th
,2023;accepted:Apr.19
th
,2023;published:Apr.26
th
,2023
©
Ù
Ú
^
:
Û
û
.
ä
k
'
~
Ô
;
J
¤
HollingI
.
Ó
-
.
Û
Ä
å
Æ
[J].
n
Ø
ê
Æ
,2023,13(4):
902-916.DOI:10.12677/pm.2023.134096
Û
û
Abstract
Inthispaper,TheobjectiveofthispaperistoinvestigateaGlobaldynamicsof
HollingtypeI predator-preymodelwithequalproportion ofpreyrefugeby introduc-
ingthresholdstrategy.Herewe provide aglobalqualitative analysistodeterminethe
global dynamics of the model.Makinguse of Filippov theory, Lyapunov functions and
Greenformula,onthebasisofglobaldynamicsoftwosubsystems,forthepredator-
preymodelunderthresholdstrategy,weexaminetheslidingmodedynamicsandthe
global dynamics.Finally,the theoreticalresultsare verified bynumericalsimulation.
Keywords
Non-SmoothSystem,Predator-PreyModel,Discontinuous,Equilibrium,Stability
Copyright
c
2023byauthor(s)andHansPublishersInc.
This work is licensed undertheCreative Commons Attribution InternationalLicense(CC BY4.0).
http://creativecommons.org/licenses/by/4.0/
1.
Ú
ó
)
Ó
ö
Ú
Ó
ö
ƒ
m
ƒ
p
'
X
é
g
,
¥
•
)
Ä
Ô
+
n
Ú
)
Ô
õ
5
o
–
'
-
‡
.
ï
Ä
Ó
ö
-
.
Ì
‡
8
´
£
ã
Ú
©
Û
Ó
ö
Ú
Ô
ƒ
m
ƒ
p
Š
^
,
l
‡
N
ý
¢
g
,
y–
.
3
y
¢)
¹
¥
,
Ô
2
o
¤
é
Ó
ö
Ú
Ô
«
+
•
k
-
‡
K
•
.
Š
â
•
#
ï
Ä
,
Ô
¦
^
;
J
¤
Œ
±
Ï
L
O
\
‚
¸
E
,
5
!
J
p
•
Ô
—
Ý
Ú
ò
•
Ó
ö
-
Ô
ƒ
p
Š
^
[1–3]
5
J
ø
;
J
,
Ô
•
Œ
±
Ï
L
¯
„
#
a
½
~
Ô
¹
Ä
±
9
Û
-
[4–6]
•
ª
ï
á
˜
m
½
ž
m
;
J
¤
±
ˆ
ø
;Ó
ö
8
,
±
d
;
•
Ô
«
ý
.
Ï
d
,
•
Ä
Ô
;
J
¤
´
š
~
k^
.
±
e
.
´
Ó
ö
-
.
^
5
ï
Ä
ð
½
'
~
½
ð
½
ê
þ
Ô
¦
^
2
o
¤
K
•
[1–5,7,8].
3
1926
c
,Maynard[9]
u
L
˜
'
u
Ô
-
Ó
ö
«
+
n
Ø
(
J
.
Ø
È
ƒ
,
p
d
3
[10]
¥
Ï
L
¢
y
¦
‚
ý
ÿ
.
k
˜
‡
¢
Ó
ö
-
Ô
X
Ú
´
d
ú
Á
Á
(
Ó
ö
)
Ú
1
[
œ
(
Ô
)
|
¤
,
¦
‚
Ï
L*
ú
Á
Á
Ø
U
±
$
—
Ý
1
[
œ
•
Ñ
±
e
(
Ø
:
1
[
œ
3
$
—
Ý
ž
,
§
‚
3
®
.
Ü
/
¤
˜
‡
œ
È
Ô
,
Ï
d
§
‚
Ã
{
Ñ
E
3
Y
Î
þ
ú
Á
Á
>
.
Ï
d
,
Ô
•
3
˜
‡
.
—
Ý
,
3ù
‡
—
Ý
e
,
Ô
¢
S
þ
ò
3
˜
‡
;
J
¤
±
“
Ž
Ó
,
˜
Ô
—
Ý
‡
L
.
Š
,
Ô
Ò
¬
-
#
Ñ
y
3
®
L
¡
,
,
Œ
±
Ó
ö
Ó
.
DOI:10.12677/pm.2023.134096903
n
Ø
ê
Æ
Û
û
©
1
Ü
©
ò
©
z
[10]
¥
ë
Y
Ó
ö
-
.
?
1
í
2
,
í
2
©
¡
1
w
Ó
ö
-
.
,
¿
Ú
\
'
Ç
Ô
;
J
¤
,
±
ï
Ä
'
Ç
Ô
;
J
¤
é
Ó
ö
-
.
K
•
±
9
©
Û
T
.
ü
‡
f
X
Ú
Ä
å
Æ
9
w
Ä
å
Æ
,
1
n
Ü
©
´
Û
Ä
å
Æ
©
Û
.
3
•
˜
!
,
é
¤
(
Ø
?
1
o
(
.
†
ë
Y
‡
©
Ä
å
X
Ú
ƒ
'
T
.
ä
k
w
Ä
å
Æ
!
–
²
ï
:
!
B
4
•
‚
!
w
4
•
‚
Õ
A
5
Ÿ
,
Ù
ï
Ä
•
ä
k
]
Ô
5
.
2.
.
0
9
ý
•
£
3
Gauseetal.[10]
Ú
MaynardSmith[9]
Ó
-
.
¥
Ú
\
•
¹
;
J
¤
Ô
«
+
ê
þ
R
x
,
·
‚
?
U
õ
U
‡
A
¼
ê
(Holling1959),
¦
Ù
C
¤
:
dx
dt
=
rx
1
−
x
k
−
c
(
x
−
R
x
)
y
dy
dt
=
ec
(
x
−
R
x
)
y
−
dy
(2.1)
Ù
¥
,
x
=
x
(
t
),
y
=
y
(
t
)
©
OL
«
Ô
Ú
Ó
ö3
t
ž
•
ê
þ
,
r
L
«
Ô
«
+
S
O
•
Ç
,
c
L
«
Ó
ö
«
+
Ó
¼
Ç
,
e
L
«
Ó
ö
«
+
=
†
Ç
,
d
L
«
Ó
ö
«
+
k
Ç
,
k
L
«
Ô
«
+
•
Œ
‚
¸
N
þ
.
Ù
¥
R
x
ê
þ
Œ
±
l
ü
‡
Ý
•
Ä
[4,8]:
(
i
)
R
x
=
mx
,
Û
õ
Ô
ê
þ
†
Ô
—
Ý
¤
'
;
(
ii
)
R
x
=
mx
c
,
Û
õ
Ô
ê
þ
•
~
ê
,
x
c
•
Ô
.
—
Ý
.
y
3
•
Ä
1
˜
«
Ý
,
q
Ï
•
Ó
ö
†
ƒ
m
ƒ
p
Š
^†
ê
þ
•
k
—
ƒ
'
X
,
ê
þ
'
ž
ÿ
,
¬
ø
;
å
5
,
ù
Ò
¦
Ó
ö
Ó
J
Ý
\
Œ
.
·
‚
Œ
±
±
e
ù
‡
ä
k
1
˜
a
õ
U
‡
A
¼
ê
Ø
ë
Y
-
Ó
.
:
dx
dt
=
rx
1
−
x
k
−
c
(1
−
m
)
xy
dy
dt
=
ec
(1
−
m
)
xy
−
dy
(2.2)
Ù
¥
¤
k
ë
ê
þ
´
ê
.
é
X
Ú
(2
.
2)
?
1
Ã
þ
j
z
Ú
ž
m
º
Ý
C
z
,
-
e
x
=
kx
,
e
y
=
ky
,
e
t
=
1
r
t
.
d
e
x
d
e
t
=
e
x
(1
−
e
x
)
−
e
c
(1
−
m
)
e
x
e
y
d
e
y
d
e
t
=
e
e
c
(1
−
m
)
e
x
e
y
−
e
d
e
y
-
ck
r
=
e
c
,
d
r
=
e
d
,
=
dx
dt
=
x
(1
−
x
)
−
c
(1
−
εm
)
xy
dy
dt
=
ec
(1
−
εm
)
xy
−
dy
(2.3)
Ù
¥
ε
•
›
›
¼
ê
,
σ>
0
•
›
›
K
Š
,
L
«
Ô
u
›
›
K
Š
σ
ž
,
Ô
¬
Û
õ
å
5
,
Ä
K
Ø
Û
DOI:10.12677/pm.2023.134096904
n
Ø
ê
Æ
Û
û
õ
.
ε
=
1
,x<σ,
0
,x>σ,
P
R
2
+
=
{
(
x,y
)
∈
R
2
:
x>
0
,y>
0
}
,
ò
(
x,y
)
∈
R
2
+
©
•
±
e
n
‡
Ü
©
:
Σ =
(
x,y
)
(
x,y
)
∈
R
2
+
,x
=
σ
}
G
1
=
(
x,y
)
(
x,y
)
∈
R
2
+
,x<σ
}
G
2
=
(
x,y
)
(
x,y
)
∈
R
2
+
,x>σ
}
P
F
1
(
x,y
) = (
x
(1
−
x
)
−
c
(1
−
m
)
xy,ec
(1
−
m
)
xy
−
dy
)
F
2
(
x,y
) = (
x
(1
−
x
)
−
cxy,ecxy
−
dy
)
u
´
,
X
Ú
(2
.
3)
Œ
±
¤
e
¡
Filippov
X
Ú
:
(
dx
dt
,
dy
dt
) =
F
1
(
x,y
)
,
(
x,y
)
∈
G
1
F
2
(
x,y
)
,
(
x,y
)
∈
G
2
(2.4)
du
•
þ
|
Ø
ë
Y5
,
©
ò
?
Ø
(2
.
4)Filippov
¿Â
e
)
[11],
Ù
½
Â
X
e
:
½
Â
2.1.
e
•
þ
¼
ê
(
x
(
t
)
,y
(
t
))
3
(0
,T
)
?
¿
k
.
4
f
«
m
[
t
1
,t
2
]
þ
ý
é
ë
Y
(0
<T
≤
+
∞
)
,
÷
v
x
(0) =
x
0
Ú
y
(0) =
y
0
,
…
•
3
Œ
ÿ
¼
ê
γ
=
γ
(
t
)
:
[0
,T
)
→
[0
,
1]
¦
é
A
¤
k
t
∈
[0
,T
)
k
dx
dt
=
x
(1
−
x
)
−
c
(1
−
γm
)
xy
dy
dt
=
ec
(1
−
γm
)
xy
−
dy
(2.5)
@
o
¡
•
þ
¼
ê
(
x
(
t
)
,y
(
t
))
´
X
Ú
(2
.
3)
L
Ð
©
Š
(
x
0
,y
0
)
)
.
•
•
Ä
.
(2
.
5)
)
Ô
Æ
¿Â
,
I
‡
y
.
)
5
Ú
k
.
5
,
5
†k
.
5
y
²
d
e
¡
ü
‡
·
K
‰
Ñ
:
·
K
2.2.
-
(
x
(
t
)
,y
(
t
))
•
X
Ú
(2
.
5)
þ
÷
v
Ð
©
^
‡
x
(0)=
x
0
>
0
Ú
y
(0)=
y
0
>
0
)
,
½
Â
«
m
•
[0
,T
)
,
Ù
¥
T
∈
(0
,
+
∞
]
,
K
é
¤
k
t
∈
[0
,T
)
,
k
x
(
t
)
>
0
Ú
y
(
t
)
>
0
.
y
²
.
b
•
3
t
1
,
¦
x
(
t
1
)
<
0
,
K
•
3
0
<t
∗
<t
1
,
¦
x
(
t
∗
) = 0
,
…
t
∈
(0
,t
∗
)
ž
,
k
x
(
t
)
>
0
¤
á
,
d
X
Ú
(2
.
5)
1
˜
‡
f
•
§
Œ
.
d
x
d
t
=
x
(1
−
x
)
−
c
(1
−
γm
)
xy
≥
x
[
−
x
−
c
(1
−
γm
)
y
]
K
t
∈
(0
,t
∗
)
k
x
(
t
)
≥
x
0
exp(
Z
t
0
[
−
x
−
c
(1
−
γm
)
y
]
dt
DOI:10.12677/pm.2023.134096905
n
Ø
ê
Æ
Û
û
A
O
/
,
t
=
t
∗
ž
k
x
(
t
∗
)
≥
x
0
exp(
Z
t
∗
0
[
−
x
−
c
(1
−
γm
)
y
]
dt>
0
†
x
(
t
∗
) = 0
g
ñ
,
Ø
•
3
t
1
,
¦
x
(
t
1
)
<
0
,
Ó
n
Œ
,
é
¤
k
t
∈
[0
,T
)
,
k
y
(
t
)
>
0
.
·
K
2.3.
X
Ú
(2
.
5)
l
R
2
+
Ñ
u
)
´
k
.
.
y
²
.
P
W
=
x
+
1
e
y
,
÷
X
Ú
(2
.
5)
é
W
¦
,
k
dW
dt
=
dx
dt
+
1
e
dy
dt
=
x
(1
−
x
)
−
d
e
y
≤
x
(1+
d
2
−
x
)
−
d
2
W
≤
1+
d
2
2
4
−
d
2
W
-
ρ
=
(
1+
d
2
)
2
4
,
φ
=
d
2
,
K
k
W
(
t
)
<W
(
t
0
)exp(
−
φt
)+
ρ
φ
(1
−
exp(
−
φt
))
≤
max
W
(
t
0
)
,
ρ
φ
Ú
lim
t
→∞
sup
W
(
t
)
≤
ρ
φ
Ï
d
,
X
Ú
(2
.
5)
l
R
2
+
Ñ
u
)
•
ª
¬
3
3
«
•
Ω =
n
(
x,y
)
∈
R
2
x
+
1
e
y
≤
ρ
φ
+
θ
o
¥
,
y
.
.
3
«
•
G
1
þ
.
•
dx
dt
=
x
(1
−
x
)
−
c
(1
−
m
)
xy
dy
dt
=
ec
(1
−
m
)
xy
−
dy
(2.6)
±
e
n
‡
²
ï
:
E
+
0
= (0
,
0)
,E
+
1
= (1
,
0)
,E
+
2
=
x
+
2
,y
+
2
=
d
ec
(1
−
m
)
,
ec
(1
−
m
)
−
d
ec
2
(1
−
m
)
2
3
«
•
G
2
þ
.
•
x
(1
−
x
)
−
cxy
ecxy
−
dy
(2.7)
k
n
‡
²
ï
:
,
©
O
•
E
−
0
= (0
,
0)
,E
−
1
= (1
,
0)
,E
−
2
=
x
−
2
,y
−
2
=
d
ec
,
ec
−
d
ec
2
é
u
X
Ú
(2
.
5),
²
ï
:
E
+
0
E
−
0
•
¢
(
J
)
²
ï
:
;
é
>
.
²
ï
:
E
+
1
E
−
1
,
e
1
<σ
K
E
+
1
E
−
1
•
¢
(
J
)
²
ï
:
,
e
1
>σ
K
E
+
1
E
−
1
•
J
(
¢
)
²
ï
:
;
é/
•
5
²
ï
:
E
+
2
E
−
2
,
e
x
+
2
(
x
−
2
)
<σ
K
E
+
2
DOI:10.12677/pm.2023.134096906
n
Ø
ê
Æ
Û
û
E
−
2
•
¢
(
J
)
²
ï
:
,
e
x
+
2
(
x
−
2
)
>σ
K
E
+
2
E
−
2
•
J
(
¢
)
²
ï
:
.
½
n
2.4.
3
f
X
Ú
(2
.
6)
¥
²
ï
:
E
+
0
= (0
,
0)
,
²
ï
:
E
+
0
´
Q
:
.
y
²
.
3
f
X
Ú
(2
.
6)
3
²
ï
:
E
+
0
= (0
,
0)
?
Jacobi
Ý
•
J
G
1
E
+
0
=
10
0
−
d
Ù
¥
,
Š
â
p
−
q
O
{
,
q
=
−
d<
0
,
²
ï
:
E
+
0
´
Q
:
.
½
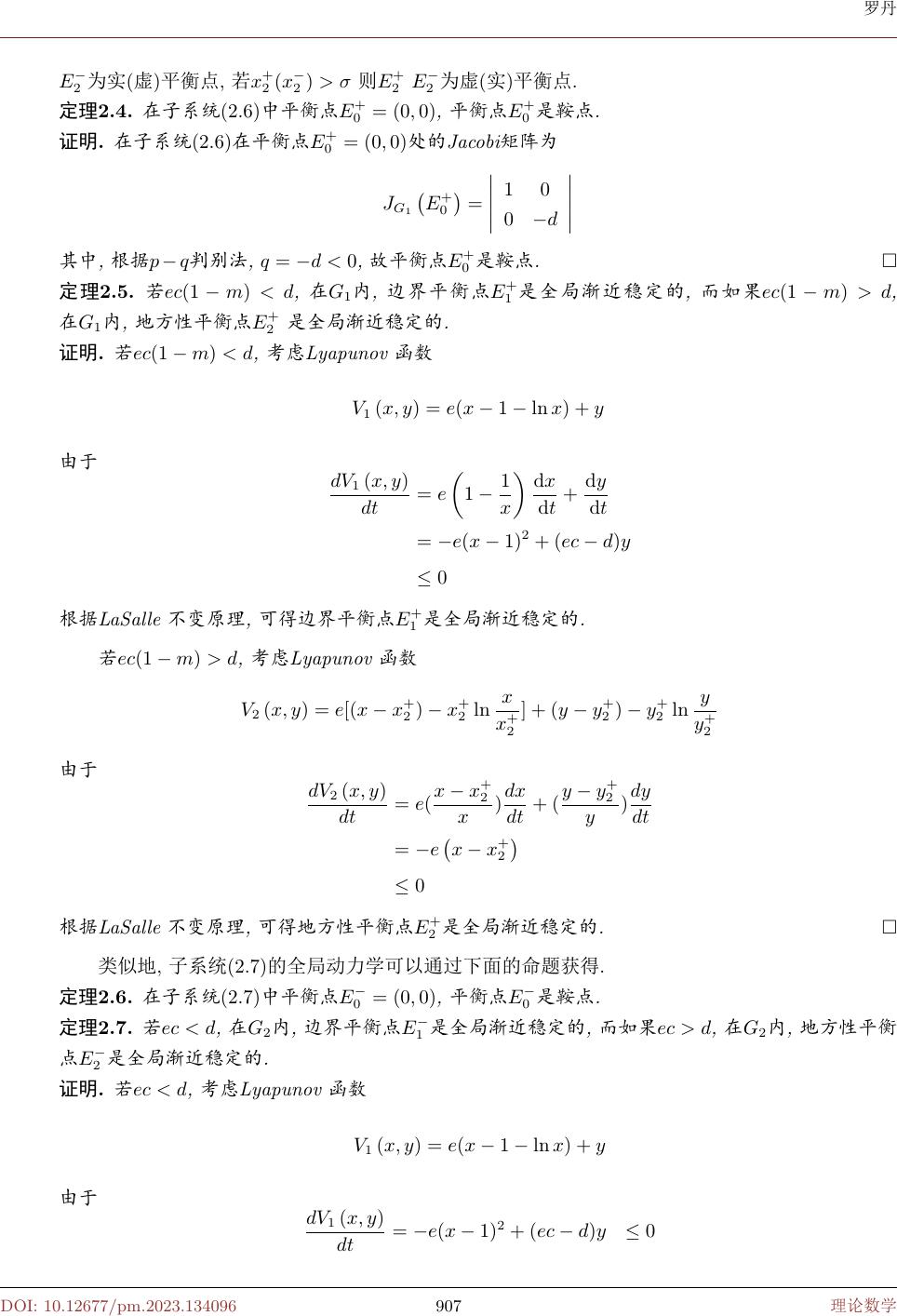
n
2.5.
e
ec
(1
−
m
)
<d
,
3
G
1
S
,
>
.
²
ï
:
E
+
1
´
Û
ì
C
-
½
,
X
J
ec
(1
−
m
)
>d
,
3
G
1
S
,
/
•
5
²
ï
:
E
+
2
´
Û
ì
C
-
½
.
y
²
.
e
ec
(1
−
m
)
<d
,
•
Ä
Lyapunov
¼
ê
V
1
(
x,y
) =
e
(
x
−
1
−
ln
x
)+
y
du
dV
1
(
x,y
)
dt
=
e
1
−
1
x
d
x
d
t
+
d
y
d
t
=
−
e
(
x
−
1)
2
+(
ec
−
d
)
y
≤
0
Š
â
LaSalle
ØC
n
,
Œ
>
.
²
ï
:
E
+
1
´
Û
ì
C
-
½
.
e
ec
(1
−
m
)
>d
,
•
Ä
Lyapunov
¼
ê
V
2
(
x,y
) =
e
[(
x
−
x
+
2
)
−
x
+
2
ln
x
x
+
2
]+(
y
−
y
+
2
)
−
y
+
2
ln
y
y
+
2
du
dV
2
(
x,y
)
dt
=
e
(
x
−
x
+
2
x
)
dx
dt
+(
y
−
y
+
2
y
)
dy
dt
=
−
e
x
−
x
+
2
≤
0
Š
â
LaSalle
ØC
n
,
Œ
/
•
5
²
ï
:
E
+
2
´
Û
ì
C
-
½
.
a
q
/
,
f
X
Ú
(2
.
7)
Û
Ä
å
Æ
Œ
±
Ï
L
e
¡
·
K
¼
.
½
n
2.6.
3
f
X
Ú
(2
.
7)
¥
²
ï
:
E
−
0
= (0
,
0)
,
²
ï
:
E
−
0
´
Q
:
.
½
n
2.7.
e
ec<d
,
3
G
2
S
,
>
.
²
ï
:
E
−
1
´
Û
ì
C
-
½
,
X
J
ec>d
,
3
G
2
S
,
/
•
5
²
ï
:
E
−
2
´
Û
ì
C
-
½
.
y
²
.
e
ec<d
,
•
Ä
Lyapunov
¼
ê
V
1
(
x,y
) =
e
(
x
−
1
−
ln
x
)+
y
du
dV
1
(
x,y
)
dt
=
−
e
(
x
−
1)
2
+(
ec
−
d
)
y
≤
0
DOI:10.12677/pm.2023.134096907
n
Ø
ê
Æ
Û
û
Š
â
LaSalle
ØC
n
,
Œ
>
.
²
ï
:
E
−
1
´
Û
ì
C
-
½
.
e
ec>d
,
•
Ä
Lyapunov
¼
ê
V
2
(
x,y
) =
e
[(
x
−
x
−
2
)
−
x
−
2
ln
x
x
−
2
]+(
y
−
y
−
2
)
−
y
−
2
ln
y
y
−
2
du
dV
2
(
x,y
)
dt
=
−
e
x
−
x
−
2
≤
0
Š
â
LaSalle
ØC
n
,
Œ
/
•
5
²
ï
:
E
−
2
´
Û
ì
C
-
½
.
4
·
‚
|
^
[11]
¥
˜
V
g
5
©
Û
Filippov
X
Ú
(2.5)
w
Ä
å
Æ1
•
,
•
)
w
•
Ú
–
²
ï
:
•
3
5
.
b
∇
H
•
•
G
1
·
L
F
i
H
=
h∇
H,F
i
i
L
«
•
þ
F
i
3
H
•
•
ê
,
h
,
i
•
I
O
S
È
,
L
m
F
i
H
=
∇
L
m
−
1
F
i
H
,F
i
L
«
m
Lie
ê
,
Ù
¥
m
≥
2.
Ï
L
{
ü
O
Ž
,
·
‚
k
L
F
1
H
=
h∇
H,F
1
i
=
x
(1
−
x
)
−
c
(1
−
m
)
xy
L
F
2
H
=
h∇
H,F
2
i
=
x
(1
−
x
−
cy
)
.
d
L
F
1
H>
0
…
L
F
2
H<
0
Œ
•
,
1
−
σ
c
<y<
1
−
σ
c
(1
−
m
)
P
y
1
=
1
−
σ
c
,y
2
=
1
−
σ
c
(1
−
m
)
.
•
•
B
å
„
,
-
T
1
= (
σ,y
1
)
,T
2
= (
σ,y
2
),
K
T
1
Ú
T
2
Ñ
´
ƒ
:
.
Ï
d
ƒ
†
‚
H
þ
w
•
•
Σ
S
=
(
x,y
)
∈
R
2
+
|
y
1
<y<y
2
B
«
•
•
Σ
C
1
=
(
x,y
)
∈
R
2
+
|
0
<y<y
1
Ú
Σ
C
2
=
(
x,y
)
∈
R
2
+
|
y
2
<y
¦
^
X
e
Filippov
à
•{
[11],
d
Z
d
t
=
F
S
(
Z
) = (1
−
λ
)
F
G
1
(
Z
)+
λF
G
2
(
Z
)
,
X
Ú
(2
.
5)
w
Ä
å
Æ
•
§
Œ
£
ã
•
dZ
dt
=
F
S
(
Z
) =
0
ex
(1
−
x
)
−
dy
!
Ù
¥
x
=
σ
.
K
•
§
•
•
3
•
˜
Š
y
p
=
eσ
(1
−
σ
)
d
.
Ï
d
é
u
X
Ú
(2
.
5)
Œ
U
•
3
•
˜
–
²
ï
:
•
E
p
=(
σ,y
p
),
Š
â
[11],
E
p
•
3
…
=
y
1
<
y
p
<y
2
,
q
Ï
•
∂G
∂y
y
p
=
−
d<
0,
Ï
d
e
E
P
•
3
,
7
½
´
-
½
.
DOI:10.12677/pm.2023.134096908
n
Ø
ê
Æ
Û
û
3.
Ì
‡
(
J
9
Ù
y
²
3ù
˜
!
,
·
‚
Ì
‡
?
Ø
X
Ú
(2
.
5)
¢
²
ï
:
Ú
–
²
ï
:
Û
-
½
5
.
¯¢
þ
,
•
y
²
²
ï
:
Û
-
½
5
,
·
‚
I
‡
ü
Ø
4
;
•
3
.
½
n
3.1.
3
X
Ú
(2
.
5)
¥
,
Ø
•
3
u
Gi
(
i
= 1
,
2)
«
•
S
4
Ü;
.
y
²
.
|
^
Bendixon-Dulac
O
K
,
B
(
x,y
) =
1
xy
,
∂B
(
x,y
)
f
11
∂x
+
∂B
(
x,y
)
f
12
∂y
=
−
1
y
≤
0
∂B
(
x,y
)
f
21
∂x
+
∂B
(
x,y
)
f
22
∂y
=
−
1
y
≤
0
d
d
Œ
•
Ø
•
3
u
Gi
(
i
= 1
,
2)
«
•
S
4
;
‚
.
½
n
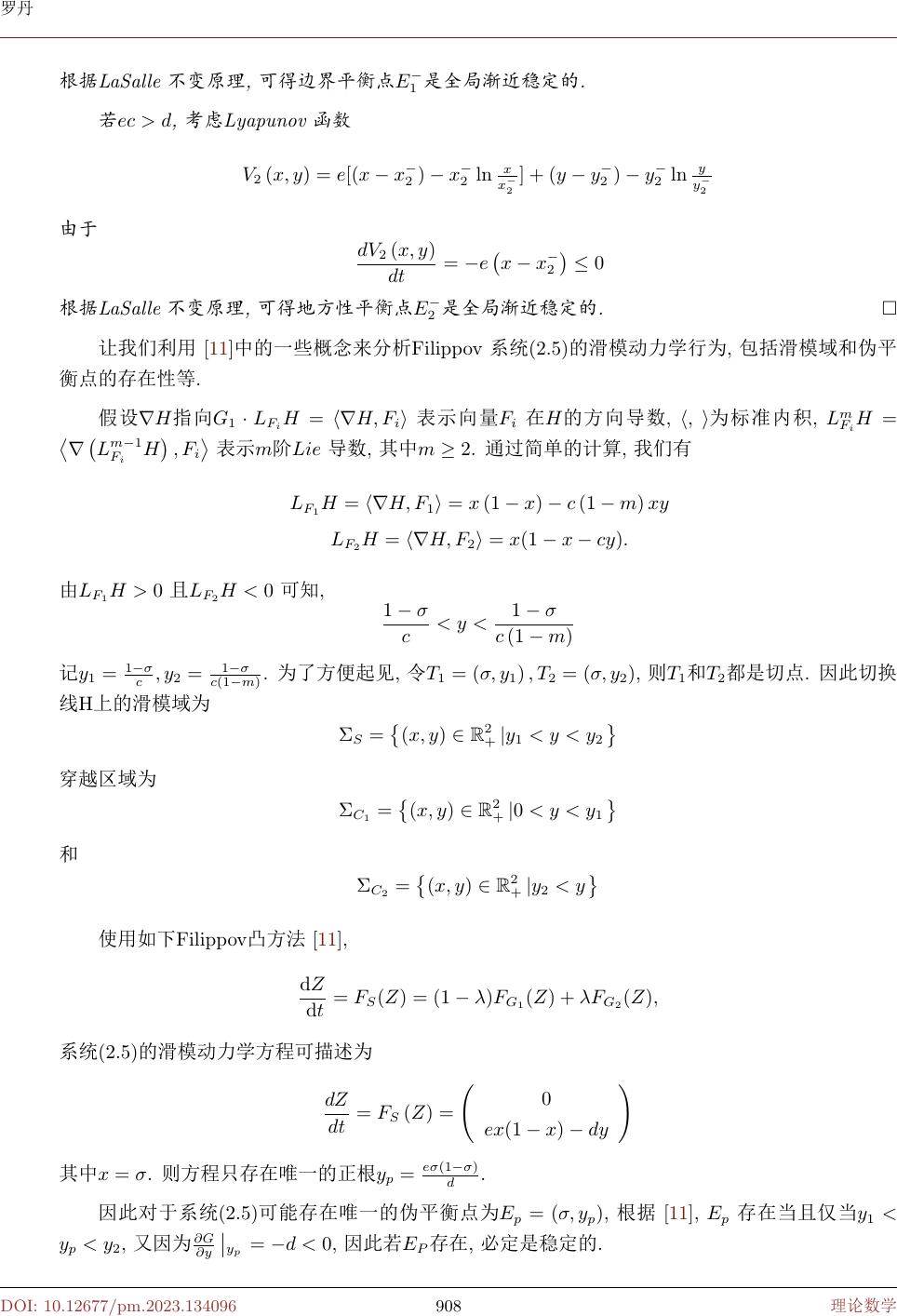
3.2.
3
X
Ú
(2
.
5)
¥
,
Ø
•
3
•
¹
Ü
©
w
Äã
AB
4
•
‚
.
y
²
.
æ
^
‡
y
{
5
y
²
.
Ø
”
˜
„
5
,
Ø
”
b
•
E
+
2
¢
,
E
−
2
•
J
ž
,
X
Ú
(2
.
5)
•
3
•
¹
Σ
S
4
;
Γ
.
K
Γ
˜
½
l
ƒ
:
T
1
Ñ
u
¿
…
ˆ
Σ
S
,
d
ž
4
;
¡
)
;
‚
Ø
U
?
\
4
;
S
Ü
(
X
ã
1
¤
«
)
,
ù
†
E
+
2
3
«
•
G
1
Û
ì
C
-
½
5
´
g
ñ
.
Ï
dl
T
1
Ñ
u
;
‚
Ø
¬
ˆ
Σ
S
.
Figure1.
Thereisnoslidingringaroundthe
slidingsegment
AB
ã
1.
w
Äã
AB
±
Œ
v
k
w
‚
½
n
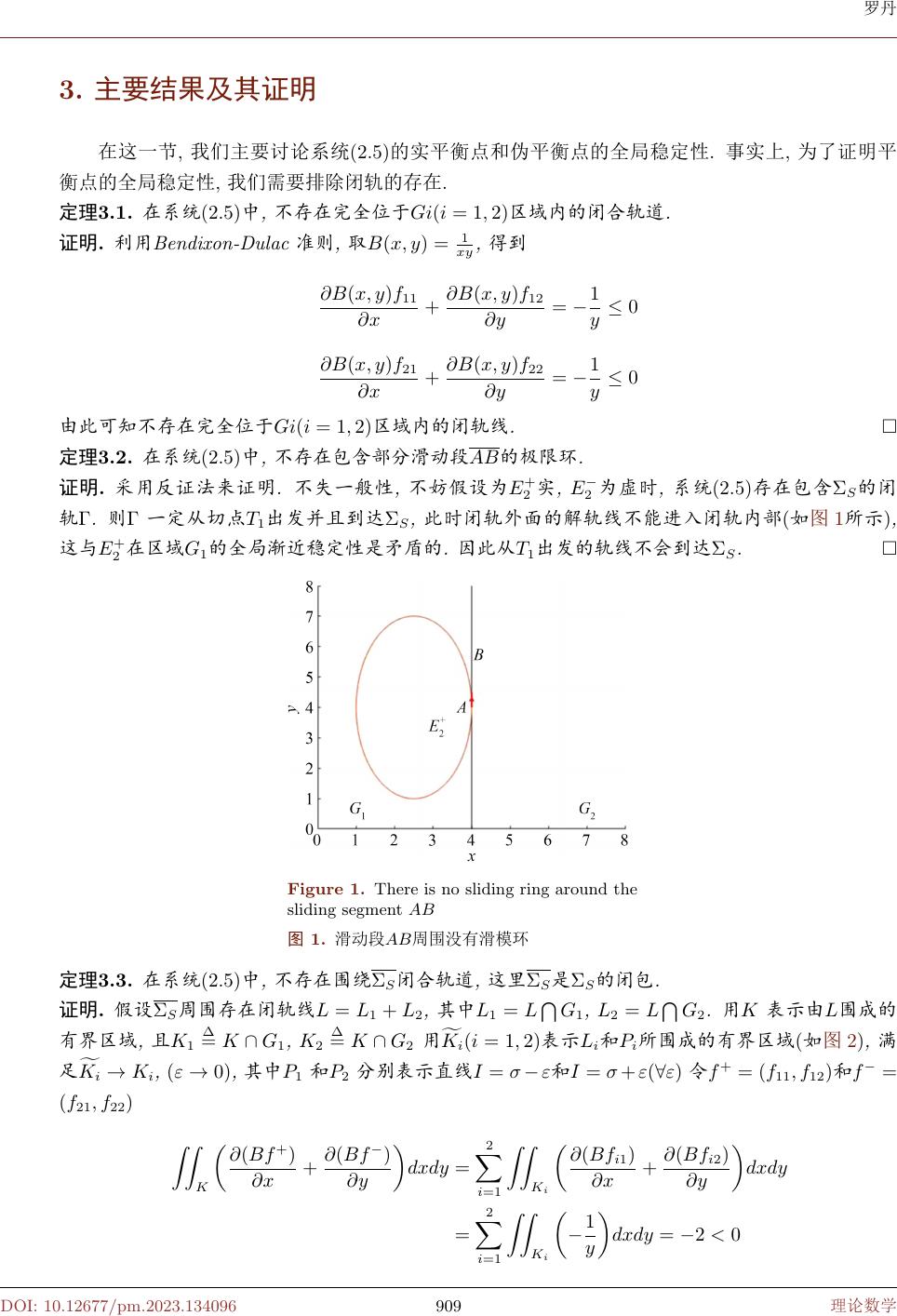
3.3.
3
X
Ú
(2
.
5)
¥
,
Ø
•
3
Œ
7
Σ
S
4
Ü;
,
ù
p
Σ
S
´
Σ
S
4
•
.
y
²
.
b
Σ
S
±
Œ
•
3
4
;
‚
L
=
L
1
+
L
2
,
Ù
¥
L
1
=
L
T
G
1
,
L
2
=
L
T
G
2
.
^
K
L
«
d
L
Œ
¤
k
.
«
•
,
…
K
1
∆
=
K
∩
G
1
,
K
2
∆
=
K
∩
G
2
^
f
K
i
(
i
= 1
,
2)
L
«
L
i
Ú
P
i
¤
Œ
¤
k
.
«
•
(
X
ã
2)
,
÷
v
f
K
i
→
K
i
,
(
ε
→
0)
,
Ù
¥
P
1
Ú
P
2
©
OL
«
†
‚
I
=
σ
−
ε
Ú
I
=
σ
+
ε
(
∀
ε
)
-
f
+
= (
f
11
,f
12
)
Ú
f
−
=
(
f
21
,f
22
)
ZZ
K
∂
(
Bf
+
)
∂x
+
∂
(
Bf
−
)
∂y
dxdy
=
2
X
i
=1
ZZ
K
i
∂
(
Bf
i
1
)
∂x
+
∂
(
Bf
i
2
)
∂y
dxdy
=
2
X
i
=1
ZZ
K
i
−
1
y
dxdy
=
−
2
<
0
DOI:10.12677/pm.2023.134096909
n
Ø
ê
Æ
Û
û
Figure2.
Thereisnolimitcyclearoundthesliding
segment
AB
ã
2.
w
Äã
AB
±
Œ
v
k
4
•
‚
∀
(
x,y
)
∈
R
2
+
,
ε
→
0
,
f
K
i
→
K
i
,
K
ZZ
K
i
∂
(
Bf
i
1
)
∂x
+
∂Bf
i
2
∂y
dxdy
=lim
ε
→
0
ZZ
f
K
i
∂
(
Bf
i
1
)
∂x
+
∂Bf
i
2
∂y
dxdy
÷
X
L
1
ž
,
dx
=
f
11
dt
,
dy
=
f
12
dt
.
3
«
•
f
K
i
A^
Green
ú
ª
Œ
ZZ
f
K
1
∂
(
Bf
11
)
∂x
+
∂Bf
12
∂y
dxdy
=
I
∂
f
k
1
B
(
f
11
dy
−
f
12
dx
)
=
Z
L
1
(
Bf
11
)
dy
−
(
Bf
12
)
dx
+
Z
p
1
(
Bf
11
)
dy
−
(
Bf
12
)
dx
=
Z
p
1
(
Bf
11
)
dy
−
(
Bf
12
)
dx
Ó
n
Œ
ZZ
f
K
2
∂
(
Bf
21
)
∂x
+
∂Bf
22
∂y
dxdy
=
I
∂
f
k
2
B
(
f
21
dy
−
f
22
dx
)
=
Z
p
2
(
Bf
21
)
dy
−
(
Bf
22
)
dx
?
˜
Ú
k
0
>
2
X
i
=1
ZZ
K
i
∂
(
Bf
i
1
)
∂x
+
∂
(
Bf
i
2
)
∂y
dxdy
=lim
ε
→
0
2
X
i
=1
ZZ
f
K
i
∂
(
Bf
i
1
)
∂x
+
∂
(
Bf
i
2
)
∂y
dxdy
=lim
ε
→
0
[
Z
p
1
(
Bf
11
)
dy
−
(
Bf
12
)
dx
+
Z
p
2
(
Bf
21
)
dy
−
(
Bf
22
)
dx
]
N
Ú
Q
•
4
;
L
†
†
‚
I
=
σ
þ
e
ü
‡
:
‹
I
.
N
1
Ú
Q
1
•
4
;
L
1
†
†
‚
I
=
σ
−
DOI:10.12677/pm.2023.134096910
n
Ø
ê
Æ
Û
û
ε
(
∀
ε
)
þ
e
ü
‡
:
‹
I
,
N
2
Ú
Q
2
•
4
;
L
2
†
†
‚
I
=
σ
+
ε
(
∀
ε
)
þ
e
ü
‡
:
‹
I
,
Ù
¥
N
2
=
N
+
ε
.
0
>
lim
ε
→
0
(
Z
N
1
Q
1
(
Bf
11
)
dy
−
(
Bf
12
)
dx
+
Z
Q
2
N
2
(
Bf
21
)
dy
−
(
Bf
22
)
dx
)
=lim
ε
→
0
(
Z
N
1
Q
1
[
1
−
x
y
−
c
(1
−
m
)]
dy
−
Z
N
2
Q
2
(
1
−
x
y
−
c
)
dy
=
Z
N
Q
cmdy>
0
d
ž
)
g
ñ
,
l
ü
Ø
‚
7
P
S
4
;
•
3
5
,
y
.
.
œ
/
1 : 0
<
d
ec
(1
−
m
)
<σ<
1.
3ù
«
œ
/
e
,
²
ï
:
E
+
2
´¢
²
ï
:
,
²
ï
:
E
−
2
´
J
²
ï
:
,
–
²
ï
:
E
p
Ø
•
3
.
½
n
3.4.
0
<
d
ec
(1
−
m
)
<σ<
1
ž
,
E
+
2
Û
ì
C
-
½
.
y
²
.
²
ï
:
E
+
2
•
¢
,
´
f
X
Ú
(2
.
6)
Û
Ü
ì
C
-
½
(
:
.
Ï
L
½
n
(3
.
2)
Ú
(3
.
3)
y
²
L
§
,
·
‚
•
?
Û;
,
˜
>
w
,
Ò
¬
÷
X
w
Äã
AB
l
e•
þ
£
Ä
.
ù
ž
ÿ
Š
â
½
n
(3
.
1)
,
v
k
u
«
•
G
1
½
G
2
4
•
‚
.
¿
…
,
qd
½
n
(3
.
2)
Ú
(3
.
3)
,
·
‚
•
Ø
•
3
•
¹
Ü
©
w
Ä
‚
½
Œ
7
w
Äã
AB
4
•
‚
.
Ï
d
,
l
«
•
G
2
m
©
;
,
‡
o
†
r
•
E
+
2
,
‡
o
E
þ
w
Ä
‚
,
÷
X
ù
^
‚
l
e
à:
A
þ
à:
B
,
,
•
ª
r
•
E
+
2
(
X
ã
3
¤
«
)
.
Ï
d
,
¤
k
;
,
•
ª
ò
ª
•
u
²
ï
:
E
+
2
,
¤
±
²
ï
:
E
+
2
Û
ì
C
-
½
.
ù
Ò
¤
y
²
.
Figure3.
E
−
2
isgloballyasymptoticallystableinthe
system(2
.
3)(
σ
=0
.
8,
e
=0
.
8,
c
=0
.
5,
d
=0
.
1,
m
=0
.
5)
ã
3.
E
+
2
3
X
Ú
(2
.
3)
¥
Û
ì
C
-
½
"
Ù
¥
σ
=0
.
8
§
e
=0
.
8
§
c
=0
.
5
§
d
=0
.
1
§
m
=0
.
5
œ
/
2 : 0
<σ<
1
<
d
ec
.
3ù
«
œ
/
e
,
²
ï
:
E
−
1
´¢
²
ï
:
,
²
ï
:
E
+
2
´
J
²
ï
:
,
–
²
ï
:
E
p
Ø
•
3
.
DOI:10.12677/pm.2023.134096911
n
Ø
ê
Æ
Û
û
½
n
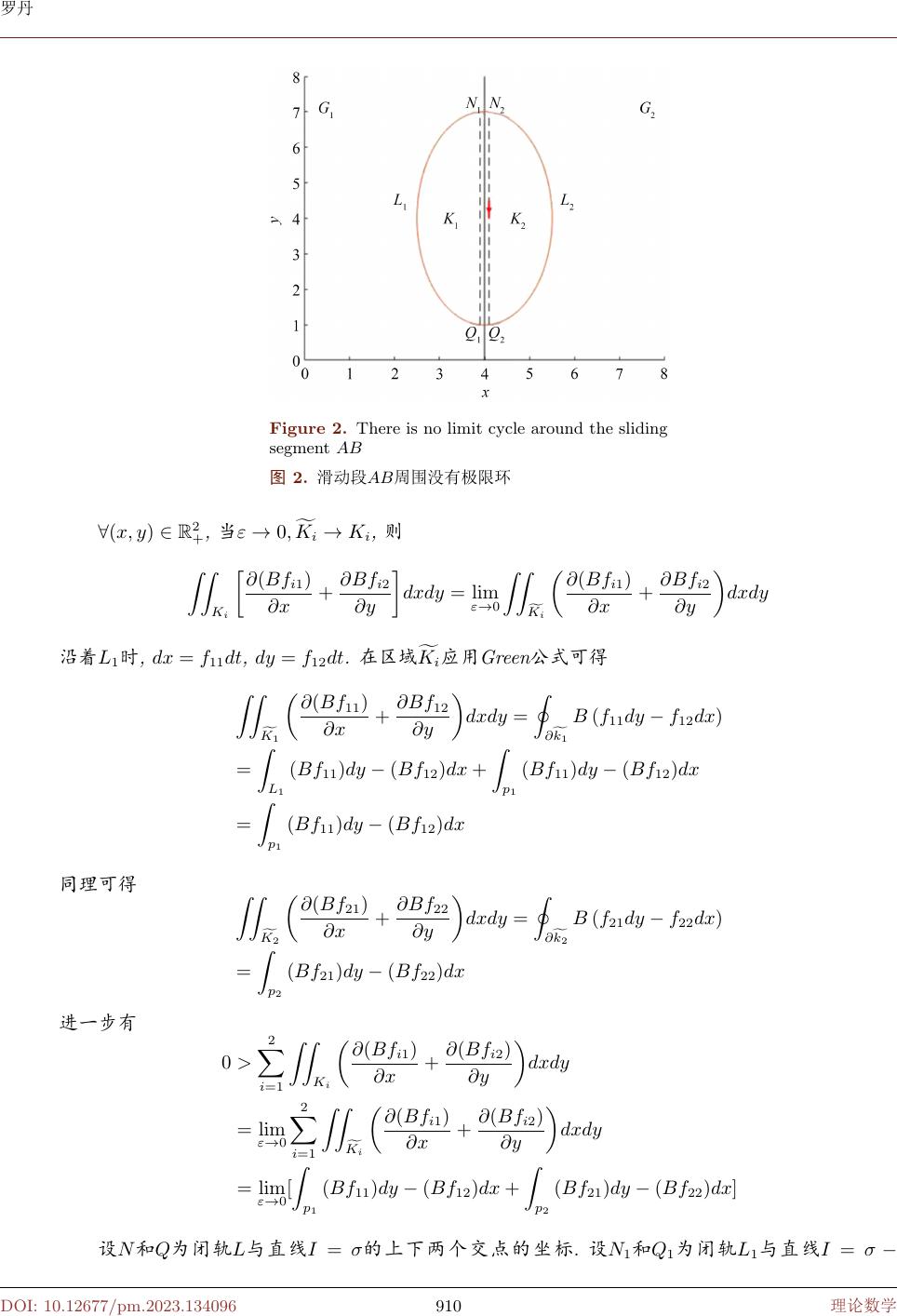
3.5.
0
<σ<
1
<
d
ec
ž
,
E
−
1
Û
ì
C
-
½
.
y
²
.
²
ï
:
E
−
1
•
¢
,
´
f
X
Ú
(2
.
7)
Û
Ü
ì
C
-
½
(
:
.
Ï
L
½
n
(3
.
2)
Ú
(3
.
3)
y
²
L
§
,
·
‚
•
?
Û;
,
˜
>
w
,
Ò
¬
÷
X
w
Äã
AB
l
e•
þ
£
Ä
.
ù
ž
ÿ
Š
â
½
n
(3
.
1)
,
v
k
u
«
•
G
1
½
G
2
4
•
‚
.
¿
…
,
qd
½
n
(3
.
2)
Ú
(3
.
3)
,
·
‚
•
Ø
•
3
•
¹
Ü
©
w
Ä
‚
½
Œ
7
w
Äã
AB
4
•
‚
.
Ï
d
,
l
«
•
G
1
m
©
;
,
‡
o
†
r
•
E
−
2
,
‡
o
E
þ
w
Ä
‚
,
÷
X
ù
^
‚
l
þ
ý
w
e
à:
B
,
,
•
ª
r
•
E
−
1
(
X
ã
4
¤
«
)
.
Ï
d
,
¤
k
;
,
•
ª
ò
ª
•
u
²
ï
:
E
−
1
,
¤
±
²
ï
:
E
−
1
Û
ì
C
-
½
.
ù
Ò
¤
y
²
.
Figure4.
E
−
1
isgloballyasymptoticallystableinthe
system(2
.
3)(
σ
=0
.
9,
e
=0
.
5,
c
=0
.
4
§
d
=0
.
8,
m
=0
.
6)
ã
4.
E
−
1
3
X
Ú
(2
.
3)
¥
Û
ì
C
-
½
"
Ù
¥
σ
=0
.
9
§
e
=0
.
5
§
c
=0
.
4
§
d
=0
.
8
§
m
=0
.
6
œ
/
3 : 0
<σ<
d
ec
<
1.
3ù
«
œ
/
e
,
²
ï
:
E
−
2
´¢
²
ï
:
,
²
ï
:
E
+
2
´
J
²
ï
:
,
–
²
ï
:
E
p
Ø
•
3
.
½
n
3.6.
0
<σ<
d
ec
<
1
ž
,
E
−
2
Û
ì
C
-
½
.
y
²
.
²
ï
:
E
−
2
•
¢
,
´
f
X
Ú
(2
.
7)
Û
Ü
ì
C
-
½
(
:
.
Ï
L
½
n
(3
.
2)
Ú
(3
.
3)
y
²
L
§
,
·
‚
•
?
Û;
,
˜
>
w
,
Ò
¬
÷
X
w
Äã
AB
l
e•
þ
£
Ä
.
ù
ž
ÿ
Š
â
½
n
(3
.
1)
,
v
k
u
«
•
G
1
½
G
2
4
•
‚
.
¿
…
,
qd
½
n
(3
.
2)
Ú
(3
.
3)
,
·
‚
•
Ø
•
3
•
¹
Ü
©
w
Ä
‚
½
Œ
7
w
Äã
AB
4
•
‚
.
Ï
d
,
l
«
•
G
1
m
©
;
,
‡
o
†
r
•
E
−
2
,
‡
o
E
þ
w
Ä
‚
,
÷
X
ù
^
‚
l
e
ý
w
þ
à:
B
,
,
•
ª
r
•
E
−
2
(
X
ã
5
¤
«
)
.
Ï
d
,
¤
k
;
,
•
ª
ò
ª
•
u
²
ï
:
E
−
2
,
¤
±
²
ï
:
E
−
2
Û
ì
C
-
½
.
ù
Ò
¤
y
²
.
œ
/
4 : 0
<
d
ec
<σ<
d
ec
(1
−
m
)
.
3ù
«
œ
/
e
,
²
ï
:
E
+
2
´
J
²
ï
:
,
²
ï
:
E
−
2
´
J
²
ï
:
,
–
²
ï
:
E
p
•
3
.
½
n
3.7.
0
<
d
ec
<σ<
d
ec
(1
−
m
)
ž
,
E
p
Û
ì
C
-
½
.
y
²
.
l
G
2
m
©
;
,
l
m
C
E
−
2
ž
,
§
‚
E
Â
ƒ
†
‚
,
÷
X
ƒ
†
‚
w
Ä
½
?
\
«
•
G
1
,
l
G
1
m
©
;
,
•
þ
C
E
+
2
ž
,
§
‚
E
Â
ƒ
†
‚
,
÷
X
ƒ
†
‚
w
Ä
½
?
\
«
•
G
2
,
ü
«
;
,
3
DOI:10.12677/pm.2023.134096912
n
Ø
ê
Æ
Û
û
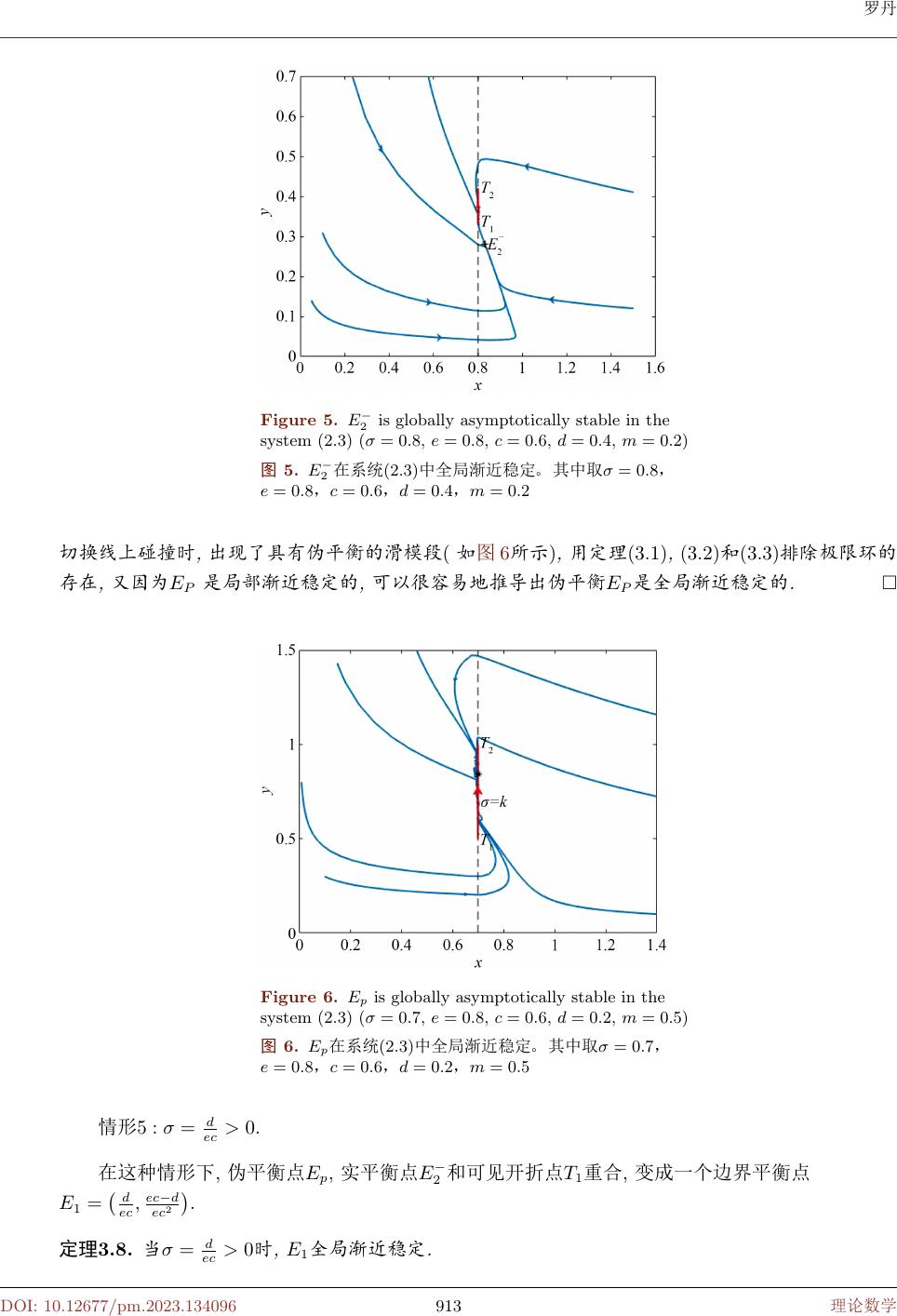
Figure5.
E
−
2
isgloballyasymptoticallystableinthe
system(2
.
3)(
σ
=0
.
8,
e
=0
.
8,
c
=0
.
6,
d
=0
.
4,
m
=0
.
2)
ã
5.
E
−
2
3
X
Ú
(2
.
3)
¥
Û
ì
C
-
½
"
Ù
¥
σ
=0
.
8
§
e
=0
.
8
§
c
=0
.
6
§
d
=0
.
4
§
m
=0
.
2
ƒ
†
‚
þ
-
E
ž
,
Ñ
y
ä
k
–
²
ï
w
ã
(
X
ã
6
¤
«
)
,
^
½
n
(3
.
1)
,
(3
.
2)
Ú
(3
.
3)
ü
Ø
4
•
‚
•
3
,
q
Ï
•
E
P
´
Û
Ü
ì
C
-
½
,
Œ
±
é
N
´
/
í
Ñ
–
²
ï
E
P
´
Û
ì
C
-
½
.
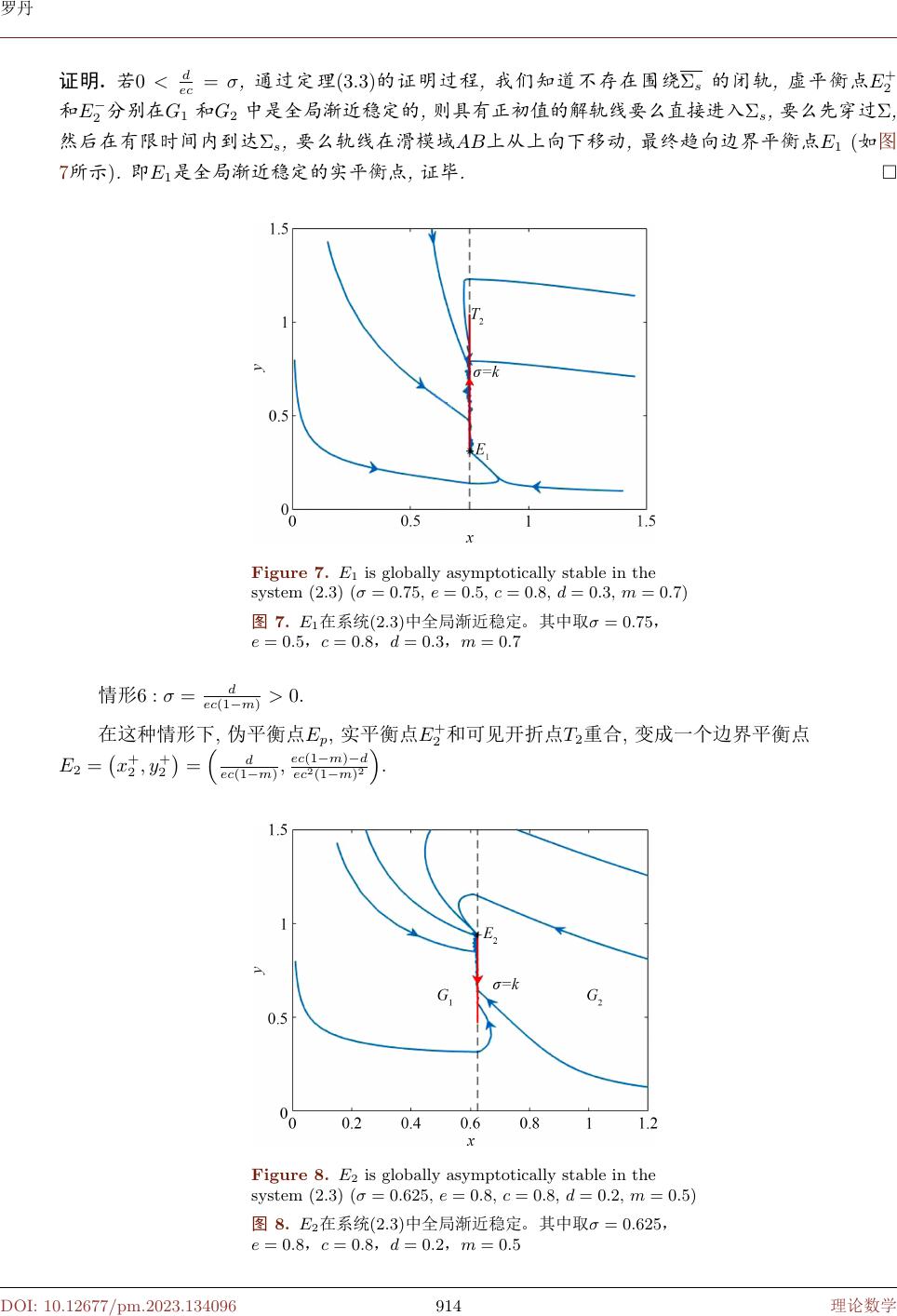
Figure6.
E
p
isgloballyasymptoticallystableinthe
system(2
.
3)(
σ
=0
.
7,
e
=0
.
8,
c
=0
.
6,
d
=0
.
2,
m
=0
.
5)
ã
6.
E
p
3
X
Ú
(2
.
3)
¥
Û
ì
C
-
½
"
Ù
¥
σ
=0
.
7
§
e
=0
.
8
§
c
=0
.
6
§
d
=0
.
2
§
m
=0
.
5
œ
/
5 :
σ
=
d
ec
>
0.
3ù
«
œ
/
e
,
–
²
ï
:
E
p
,
¢
²
ï
:
E
−
2
Ú
Œ
„
m
ò
:
T
1
-
Ü
,
C
¤
˜
‡
>
.
²
ï
:
E
1
=
d
ec
,
ec
−
d
ec
2
.
½
n
3.8.
σ
=
d
ec
>
0
ž
,
E
1
Û
ì
C
-
½
.
DOI:10.12677/pm.2023.134096913
n
Ø
ê
Æ
Û
û
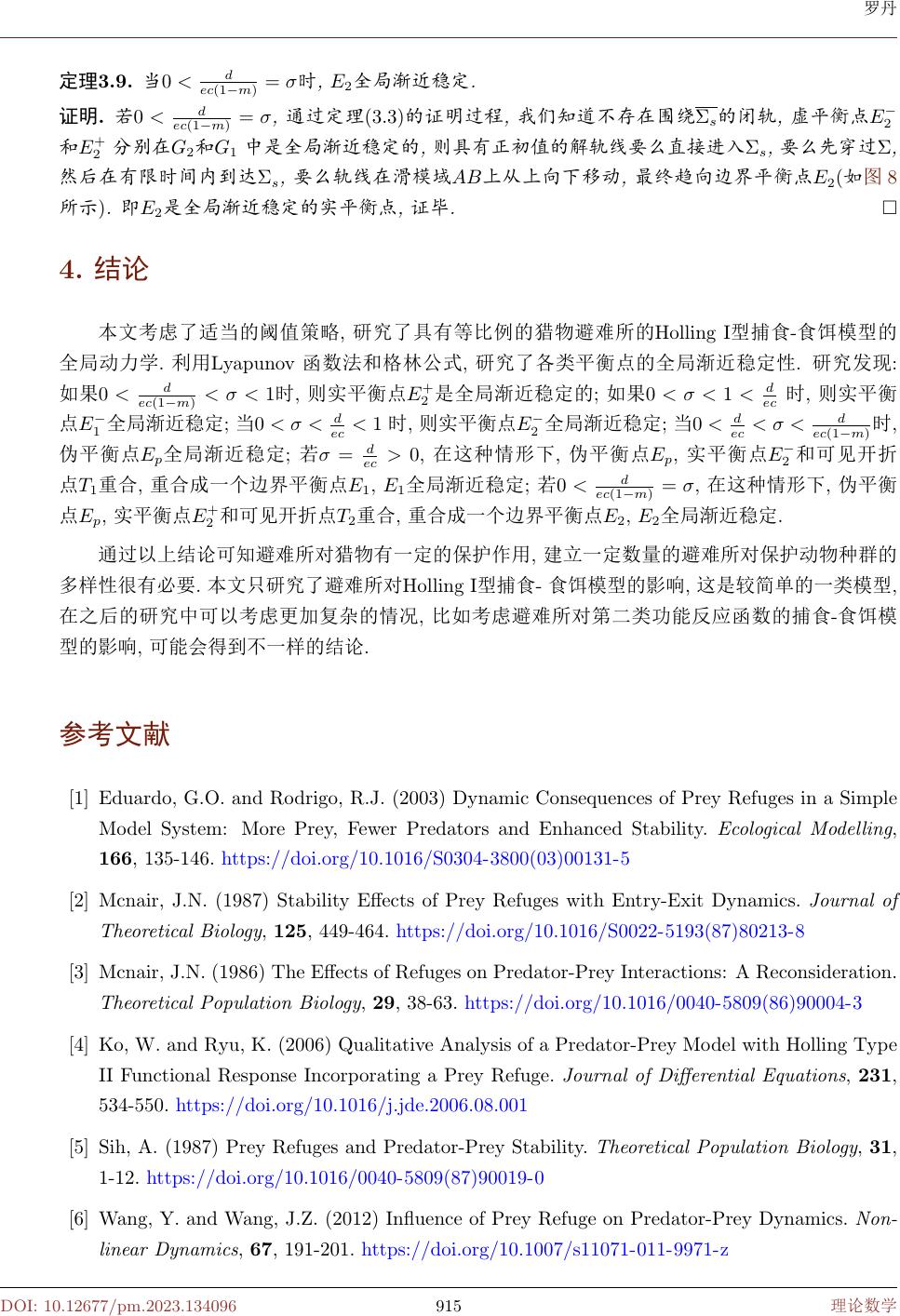
y
²
.
e
0
<
d
ec
=
σ
,
Ï
L
½
n
(3
.
3)
y
²
L
§
,
·
‚
•
Ø
•
3
Œ
7
Σ
s
4
;
,
J
²
ï
:
E
+
2
Ú
E
−
2
©
O
3
G
1
Ú
G
2
¥
´
Û
ì
C
-
½
,
K
ä
k
Ð
Š
)
;
‚
‡
o
†
?
\
Σ
s
,
‡
o
k
B
L
Σ
,
,
3
k
•
ž
m
S
ˆ
Σ
s
,
‡
o
;
‚
3
w
•
AB
þ
l
þ
•e
£
Ä
,
•
ª
ª
•
>
.
²
ï
:
E
1
(
X
ã
7
¤
«
)
.
=
E
1
´
Û
ì
C
-
½
¢
²
ï
:
,
y
.
.
Figure7.
E
1
isgloballyasymptoticallystableinthe
system(2
.
3)(
σ
=0
.
75,
e
=0
.
5,
c
=0
.
8,
d
=0
.
3,
m
=0
.
7)
ã
7.
E
1
3
X
Ú
(2
.
3)
¥
Û
ì
C
-
½
"
Ù
¥
σ
=0
.
75
§
e
=0
.
5
§
c
=0
.
8
§
d
=0
.
3
§
m
=0
.
7
œ
/
6 :
σ
=
d
ec
(1
−
m
)
>
0.
3ù
«
œ
/
e
,
–
²
ï
:
E
p
,
¢
²
ï
:
E
+
2
Ú
Œ
„
m
ò
:
T
2
-
Ü
,
C
¤
˜
‡
>
.
²
ï
:
E
2
=
x
+
2
,y
+
2
=
d
ec
(1
−
m
)
,
ec
(1
−
m
)
−
d
ec
2
(1
−
m
)
2
.
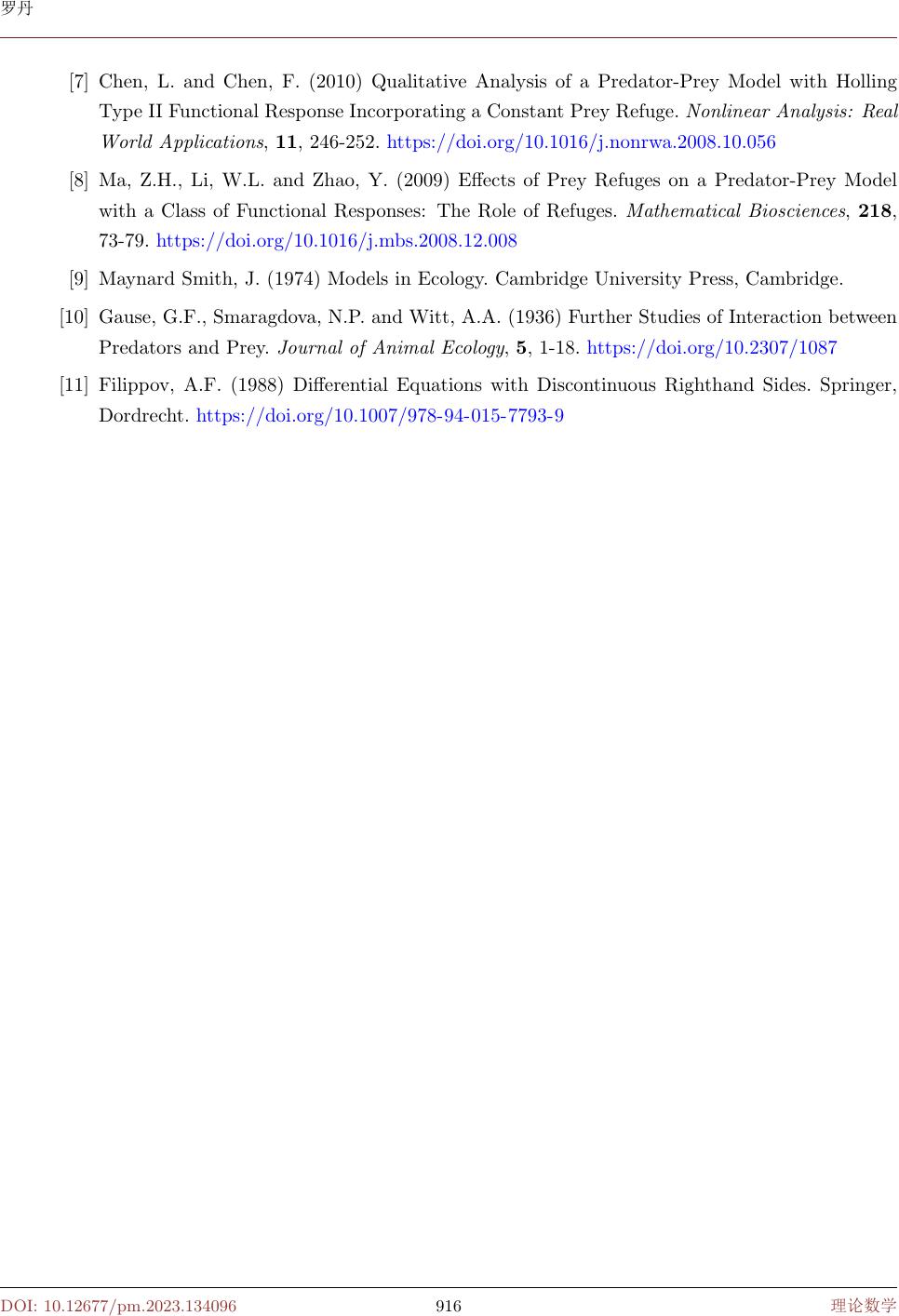
Figure8.
E
2
isgloballyasymptoticallystableinthe
system(2
.
3)(
σ
=0
.
625,
e
=0
.
8,
c
=0
.
8,
d
=0
.
2,
m
=0
.
5)
ã
8.
E
2
3
X
Ú
(2
.
3)
¥
Û
ì
C
-
½
"
Ù
¥
σ
=0
.
625
§
e
=0
.
8
§
c
=0
.
8
§
d
=0
.
2
§
m
=0
.
5
DOI:10.12677/pm.2023.134096914
n
Ø
ê
Æ
Û
û
½
n
3.9.
0
<
d
ec
(1
−
m
)
=
σ
ž
,
E
2
Û
ì
C
-
½
.
y
²
.
e
0
<
d
ec
(1
−
m
)
=
σ
,
Ï
L
½
n
(3
.
3)
y
²
L
§
,
·
‚
•
Ø
•
3
Œ
7
Σ
s
4
;
,
J
²
ï
:
E
−
2
Ú
E
+
2
©
O
3
G
2
Ú
G
1
¥
´
Û
ì
C
-
½
,
K
ä
k
Ð
Š
)
;
‚
‡
o
†
?
\
Σ
s
,
‡
o
k
B
L
Σ
,
,
3
k
•
ž
m
S
ˆ
Σ
s
,
‡
o
;
‚
3
w
•
AB
þ
l
þ
•e
£
Ä
,
•
ª
ª
•
>
.
²
ï
:
E
2
(
X
ã
8
¤
«
)
.
=
E
2
´
Û
ì
C
-
½
¢
²
ï
:
,
y
.
.
4.
(
Ø
©
•
Ä
·
K
Š
ü
Ñ
,
ï
Ä
ä
k
'
~
Ô
;
J
¤
HollingI
.
Ó
-
.
Û
Ä
å
Æ
.
|
^
Lyapunov
¼
ê
{
Ú
‚
ú
ª
,
ï
Ä
ˆ
a
²
ï
:
Û
ì
C
-
½
5
.
ï
Ä
u
y
:
X
J
0
<
d
ec
(1
−
m
)
<σ<
1
ž
,
K
¢
²
ï
:
E
+
2
´
Û
ì
C
-
½
;
X
J
0
<σ<
1
<
d
ec
ž
,
K
¢
²
ï
:
E
−
1
Û
ì
C
-
½
;
0
<σ<
d
ec
<
1
ž
,
K
¢
²
ï
:
E
−
2
Û
ì
C
-
½
;
0
<
d
ec
<σ<
d
ec
(1
−
m
)
ž
,
–
²
ï
:
E
p
Û
ì
C
-
½
;
e
σ
=
d
ec
>
0,
3ù
«
œ
/
e
,
–
²
ï
:
E
p
,
¢
²
ï
:
E
−
2
Ú
Œ
„
m
ò
:
T
1
-
Ü
,
-
Ü
¤
˜
‡
>
.
²
ï
:
E
1
,
E
1
Û
ì
C
-
½
;
e
0
<
d
ec
(1
−
m
)
=
σ
,
3ù
«
œ
/
e
,
–
²
ï
:
E
p
,
¢
²
ï
:
E
+
2
Ú
Œ
„
m
ò
:
T
2
-
Ü
,
-
Ü
¤
˜
‡
>
.
²
ï
:
E
2
,
E
2
Û
ì
C
-
½
.
Ï
L
±
þ
(
Ø
Œ
•
;
J
¤
é
Ô
k
˜
½
o
Š
^
,
ï
á
˜
½
ê
þ
;
J
¤
é
o
Ä
Ô
«
+
õ
5
é
k
7
‡
.
©
•
ï
Ä
;
J
¤
é
HollingI
.
Ó
-
.
K
•
,
ù
´
{
ü
˜
a
.
,
3
ƒ
ï
Ä
¥
Œ
±
•
Ä
•
\
E
,
œ
¹
,
'
X
•
Ä
;
J
¤
é1
a
õ
U
‡
A
¼
ê
Ó
-
.
K
•
,
Œ
U
¬
Ø
˜
(
Ø
.
ë
•
©
z
[1]Eduardo,G.O.andRodrigo,R.J.(2003)DynamicConsequencesofPreyRefugesinaSimple
ModelSystem:MorePrey,FewerPredatorsandEnhancedStability.
EcologicalModelling
,
166
,135-146.https://doi.org/10.1016/S0304-3800(03)00131-5
[2]Mcnair,J.N.(1987)StabilityEffectsofPreyRefugeswithEntry-ExitDynamics.
Journalof
TheoreticalBiology
,
125
,449-464.https://doi.org/10.1016/S0022-5193(87)80213-8
[3]Mcnair,J.N.(1986)TheEffects ofRefugesonPredator-Prey Interactions:A Reconsideration.
TheoreticalPopulationBiology
,
29
,38-63.https://doi.org/10.1016/0040-5809(86)90004-3
[4]Ko,W. andRyu, K.(2006) Qualitative Analysisof aPredator-Prey Modelwith HollingType
IIFunctionalResponseIncorporatingaPreyRefuge.
JournalofDifferentialEquations
,
231
,
534-550.https://doi.org/10.1016/j.jde.2006.08.001
[5]Sih,A.(1987)PreyRefugesandPredator-PreyStability.
TheoreticalPopulationBiology
,
31
,
1-12.https://doi.org/10.1016/0040-5809(87)90019-0
[6]Wang,Y.andWang,J.Z.(2012)InfluenceofPreyRefugeonPredator-PreyDynamics.
Non-
linearDynamics
,
67
,191-201.https://doi.org/10.1007/s11071-011-9971-z
DOI:10.12677/pm.2023.134096915
n
Ø
ê
Æ
Û
û
[7]Chen,L.andChen,F.(2010)QualitativeAnalysisofaPredator-PreyModelwithHolling
Type IIFunctionalResponseIncorporating aConstant Prey Refuge.
NonlinearAnalysis:Real
WorldApplications
,
11
,246-252.https://doi.org/10.1016/j.nonrwa.2008.10.056
[8]Ma,Z.H.,Li,W.L.andZhao,Y.(2009)EffectsofPreyRefugesonaPredator-PreyModel
withaClassofFunctionalResponses:TheRoleofRefuges.
MathematicalBiosciences
,
218
,
73-79.https://doi.org/10.1016/j.mbs.2008.12.008
[9]MaynardSmith,J.(1974)ModelsinEcology.CambridgeUniversityPress,Cambridge.
[10]Gause,G.F.,Smaragdova,N.P.andWitt,A.A.(1936)FurtherStudiesofInteractionbetween
PredatorsandPrey.
JournalofAnimalEcology
,
5
,1-18.https://doi.org/10.2307/1087
[11]Filippov,A.F.(1988)DifferentialEquationswithDiscontinuousRighthandSides.Springer,
Dordrecht.https://doi.org/10.1007/978-94-015-7793-9
DOI:10.12677/pm.2023.134096916
n
Ø
ê
Æ