设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投搞
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
Mechanical Engineer
ing and Technology
机械工程与技术
, 2012, 1, 7-13
http://dx.doi.org/10.12677/met.2012.12002
Published Online June 2012 (http
://www.hanspub.org/journal/met)
Simulation and Analysis of Vector Control and Direct Torque
Control for High-Speed Motorized Spindles
*
Minghong Zhou, Xiao’an Chen
State Key Lab of Mechanical Transmission, Chongqing University, Chongqing
Email: zhoumhcn@gmail.com, xachen@cqu.edu.cn
Received: Apr. 27th, 2012; revised:
May 10th, 2012; accepted: May 11th, 2012
Abstract:
Vector control (VC) and Direct torque control (DTC) are both high-performance drive control methods for
high-speed motorized spindles, and their control performances have a significant impact on the machining quality of the
spindle. To study VC, DTC and their comparison on high-s
peed motorized spindles, according to their basic control
equations, a VC model and a DTC model are constructed respectively to carry out VC and DTC simulation on a type
170MD15Y20 high-speed motorized spindle, whose rated speed is 15,000 rpm. The simulation results are analyzed and
compared, and the features of VC and DTC are summarized.
Keywords:
High-Speed Motorized Spindle; Vector Control; Direct Torque Control; Simulation
高速电主轴矢量控制与直接转矩控制仿真及分析
*
周明红,陈小安
重庆大学机械传动国家重点实验室,重庆
Email: zhoumhcn@gmail.com, xachen@cqu.edu.cn
收稿日期:
2012
年
4
月
27
日;修回日期:
2012
年
5
月
10
日;录用日期:
2012
年
5
月
11
日
摘
要:
矢量控制和直接转矩控制是高速电主轴的高性能驱动控制方法,其控制性能对高速电主轴的加工质量
有重要影响。为了研究高速电主轴的矢量控制、直接转矩控制以及它们之间的差异,本文根据其控制基本方程,
分别建立一个矢量控制仿真模型和一个直接转矩控制模型,
对额定转速为
15,000
转的
170MD15Y20
型高速电主
轴进行了矢量控制和直接转矩控制仿真,并对仿真结果进行了分析、对比,最后总结了矢量控制和直接转矩控
制的特点。
关键词:
高速电主轴;矢量控制;直接转矩控制;仿真
1.
引言
高速电主轴作为高速机床的核心部件,其驱动控
制方法的静、动态性能对高速加工质量有重要的影
响。矢量控制和直接转矩控制作为两种高性能控制方
法,是目前高速电主轴的主要控制方法。因此,研究
高速电主轴的矢量控制和直接转矩控制,是进一步改
善高速电主轴高速加工质量的基础。
鼠笼式异步型高速电主轴结构简单,坚固耐用,
但要实现其高性能驱动控制,是比较困难的。上世纪
70
和
80
年代,
德国学者
Blaschke
[1]
和
De Depenbrock
[2]
针对交流异步电动机动态性能较低的问题,分别提出
了矢量控制和直接转矩控制,实现了对异步电动机磁
链和电磁转矩的独立、瞬态控制。之后,
De Doncker
[3]
、
Pandya
[4]
等人在这两位学者的基础上,对矢量控制和
直接转矩控制进行了多种改进和深入研究,使它们在
*
资助信息:国家自然科学基金
(51005259)
、重庆大学机械传动国家
重点实验室访问学者基金项目
(KFKT-200801)
、中央高校基本科研
业务费资助,基金编号:
CDJXS11111143
。
Copyright © 2012 Hanspub
7
高速电主轴矢量控制与直接转矩控制仿真及分析
交流异步电动机的驱动中得到广泛应用。国内方面,
陈小安
[5]
、张珂
[6]
等人对矢量控制和直接转矩控制在
高速电主轴上的应用进行了较深入的研究,获得了高
速电主轴良好的动态性能。
高速电主轴转速很高,高达几万、几十万转,并
且是直接用来夹装刀具对工件进行加工的,对驱动控
制提出了更高的要求。上述工作主要对交流异步电动
机的矢量控制和直接转矩控制做了深入的研究,但对
矢量控制和直接转矩控制在高速电主轴上的应用及
其对比研究,还不是很充分。本文根据高速电主轴矢
量控制和直接转矩控制的基本方程,在
MATLAB/
Simulink
中搭建了一个矢量控制和一个直接转矩控制
仿真系统,完成了控制器参数整定,对额定转速为
15,000
转的
170MD15Y20
型高速电主轴进行了额定
转速下的空载启动和加载,并对仿真结果进行了对比
分析,总结了矢量控制和直接转矩控制的特点,并展
望了它们一个发展方向。
2.
高速电主轴矢量控制与直接转矩
控制方程
本文研究的高速电主轴的内置电机为无壳异步
电动机,因此异步电动机的控制理论也适用于高速电
主轴的驱动控制。
2.1.
矢量控制方程
通过矢量变换,可把高速电主轴在三相静止坐标
系
ABC
上的电磁参量变换到同步旋转坐标系
dq
上,
进而实现励磁电流和转矩电流的有效解耦。将高速电
主轴在三相静止坐标系上的数学模型变换到二相同
步旋转坐标系上后,可推导出按转子磁链定向的矢量
控制基本方程
[7]
,即
1
m
r
r
L
Tp
i
ds
(1)
m
ep rq
r
L
n
L
T
s
i
(2)
m
qs
rr
L
T
i
(3)
d
sr
t
(4)
式
(1)~(4)
中,
ψ
r
为转子磁链,
i
ds
和
i
qs
分别为定子
电流矢量在
d
、
q
轴上的分量,亦称励磁电流分量和
转矩电流分量;
ψ
r
为转子磁链;
L
m
为定、转子间的互
感;
L
r
为转子自感;
rr
LR
r
T
为转子电路时间常数,
其中
R
r
为转子电阻;
n
p
为极对数;
p
为微分算子;
T
e
为电磁转矩;
Δ
ω
为转差角速度或转差角频率,且
–
s
r
;
ω
r
为转子电角速度;
θ
s
为转子磁链位
置角。
在矢量控制中,通过将三相电流变换到二相同步
旋转坐标系上,通过式
(1)
可算得转子磁链,通过式
(2)
可算得电磁转矩,通过式
(3)
可算得转差角速度。转差
角速度再
加上转子机械角速度并积分,可算得转子磁
链位置角,即式
(4)
所示。
式
(1)
~
(4)
是高速电主轴矢量控制的基本方程,可
由此构成
高速电主轴矢量控制系统。
2.2.
直接转矩控制方程
在三项静止坐标系或二相同步旋转坐标系上,高
速电主轴的机、电、磁参数具有关系式
[7]
sin
m
ep sr
sr
L
n
LL
T
(5)
d
1
d
m
r
rrrr
s
L
Tj
tL
T
s
(6)
d
ssss
R
ui
t
s
(7)
eps
n
Ti
(8)
式
(5)
~
(8)
中,
s
L
为定子瞬态电感,且
2
s
sm r
LLLL
;
ψ
s
为定子磁链
(
黑体为矢量
)
,
δ
为定、
转子磁链的夹角;
σ
为漏磁系数,且
2
1
msr
LLL
;
j
为复平面的虚轴;
u
s
为定子电压;
i
s
为定子电流。
由式
(5)
可以看出,如果能够保持定、转子磁链幅
值不变,那么
可以通过改变它们之间的夹角
δ
来调节
电磁转矩
T
e
。又由式
(6)
可知,在定子磁链矢量
ψ
s
作用
下,转子磁链
ψ
r
的动态响应具有一阶滞后特性。即在
非常短暂的开关时间内,改变定子磁链
ψ
s
时,可以认
为转子磁链是不变的。由式
(7)
可以通过定子电压、电
流来间接
观测定子磁链的幅值和相位。
通过式
(8)
可算得高速电主轴的电磁转矩,通过式
(7)
可算得定子磁链的幅值和相位。再根据电磁转矩、
定子磁链的幅值与参考值的比较以及定子磁链的位
置角,
选择合适的电压矢量,实现对电磁转矩的直接
控制。
Cop
yright © 2012 Hanspub
8
高速电主轴矢量控制与直接转矩控制仿真及分析
Copyright © 2012 Hanspub
9
式
(5)
~
(8)
是高速电主轴直接转矩控制的基本方
程,可依此构成高速电主轴直接转矩控制系统。
构建成一
个带转矩内环的转速、磁链闭环矢量控制系
统,如图
2
所示。
图
2
中,输入为给定转速
n
*
和负载转矩
T
m
;输出
为主轴转速
w
m
、转矩
T
e
。
HSMS
为高速电主轴;
Flux
Obs.
为磁链观测器;
Torque Cal.
用于计算实际电磁转
矩,由式
(2)
得到;
Cu
rrent Hist.
为电流滞环比较控制器;
APhiR
为磁链调节器,
ASR
为转速调节器,
AT R
为转
矩调节器,这三个调节器都为
PI
调节器;
Flux Table
为磁链函数发生器,用于实现高于基速时的弱磁控
制。
3.
高速电主轴矢量控制与直接转矩控制
仿真建模
MATLAB
中的
Simulink
是一个强大的动态仿真
工具箱,能对各种系统进行动态仿真。
MATLAB/
Simulink
采用图形化的编程语言,可根据系统的控制
框图直接搭建仿真模型,避免了如
VB
、
VC++
等计算
机语言的繁琐文本编程,简洁直观。同时,该仿真平
台为著名的数学软件
MATLAB
的上层专业工具箱,
具有
MATLAB
强大的数学计算能力。其中,
Simulink
中的
SimPowerSystems
模块库是专为各种电力系统仿
真而设置的,本文的高速电主轴矢量控制仿真正是在
该模块库中进行的。
在图
2
的系
统中,按表
1
输入
170MD15Y20
型高
速电主轴的参数。
Current Hist.
的滞环宽度设为
4 A
。
通过反复调试,完成
ASR
、
ATR
和
APhiR
调节器的
参数整定,如表
2
所示。
3
phir
2
isq
1
the
f(u)
ws = Lm/Tr*isq/Phir
np
np
iabc
the
idq
abc to dq
Lm
Tr.s+1
1
s
e
m
2
wr
1
iabc
3.1.
矢量控制仿真建模
高速电主轴的矢量控制中,对转子磁链幅值和位
置的测量对控制性能好坏甚至控制能否实现是非常
重要的。图
1
为矢量控制磁链观测器,通过模块
abc to
dq
可以将三相电流变换为二相电流,再由式
(1)
、式
(3)
和式
(4)
,可输出磁链的幅值
phi
r
和相位角
the
,以及转
矩电流
isq
。
Figure 1. Flux observer of vector control
磁链观测
器可输出磁链、电流,再联系式
(2)
,可
图
1.
矢量控制磁链观测器
Discre te,
Ts = 1e -006 s.
powergui
phir_sco
15000
nr*
n_sco
iabc_sco
isd*
isq*
the
iabc*
dq to abc
is q
phir
Te
Torque Cal.
Te_sco
30/pi
Speed Trans.
m
wm
Speed Det.
Load
g
A
B
C
+
-
Inve rter
m
A
B
C
Tm
HSMS
nr phir*
Flux Table
iabc
wr
the
isq
phir
Flux Obs.
DC
iabc*
iabc
Gat es
Current Hyst.
Iabc
Ai
Bi
Ci
Ao
Bo
Co
Current
Detecto r
Te *
Te
is q*
ATR
nr*
nr
Te *
ASR
phir*
phir
is d*
APhiR
Figure 2. Vector control simulation model of the high-speed motorized spindle
图
2.
高速电主轴矢量控制仿真模型
高速电主轴矢量控制与直接转矩控制仿真及分析
Table 1. Parameters of the type 170MD15Y20 high-speed moto-
riezed spindle
表
1. 170MD15Y20
型的高速电主轴的参数
参数名称
取值
参数名称
取值
额定功率
20 KW
定子电阻
0.11
Ω
额定电压
350 V
转子电阻
0.21
Ω
额定电流
46 A
定子漏感
0.00030 H
额定转速
15,000 rpm
转子漏感
0.00031 H
极对数
2
互感
0.01017 H
Table 2. Parameters of PI Controllers of vector control
表
2.
矢量控制各
PI
调节器的参数
参数名称
ASR ATR APhiR
比例系数
2 10 1000
积分系数
50 10 100,000
控制器限幅上限
16 100 50
控制器限幅下限
–16 –100 –50
3.2.
直接转矩控制仿真建模
同样,直接转矩控制中对磁链的观测也是很重要
的,只不过跟矢量控制中要观测转子磁链不同,直接
转矩控制中观测的是定子磁链。图
3
为本文直接转矩
控制所建立的磁链观测器,根据式
(7)
构建而成。
根据式
(8)
,可建成图
4
所示
的高速电主轴直接转
矩控制仿真系统,其输入、输出与矢量控制的相同。
图中,
Flux Obs.
为磁链观测器,由式
(7)
建成;
T
orque Cal.
为转矩计算器,可由式
(8)
得到;
Rect to
Polar
是将直角坐标量变换成极坐量;
Sector
用于确定
定子磁链所在的扇区;
Switch Table
是一个开关表,
输出由输入
the
、
Hphi
和
sec
决定;
Te Hist.
和
Phi Hist.
都为是滞环比较器;
ASR
为转速调节器,与矢量控制
中的
ASR
一样也为
PI
调节器;
Flux Table
是磁链函数
发生器,以实现高于基速时的弱磁控制。
其中,开关表按表
3
选取开关电压矢量
[7]
,表中
①
~
⑥为扇区,电压矢量
u
s
1,
u
s
2,
…
,
u
s
8
的空间位置及
各个扇区的位置大小如图
5
所示。
Te Hist.
的滞环宽度
设为
2 N·m
,
Phi Hist.
的滞环宽度设为
0.004 Wb
。经
过反复调试,直接转矩控制
PI
调节器
ASR
参数分别
为:比例系数
15
,积分系数
10
,控制器限幅上限
16
,
控制器限幅下限
–16
。
4
ibet
3
ialp
2
phibet
1
phialp
K
Ts (z+1
2(z-1)
int1
K
Ts (z+1
2(z-1)
int
iabc
ialp
ibet
abc to alpbet
iabc
ualp
ubet
abc to alpbet
Rs
Rs
2
uabc
1
iabc
Figure 3. Flux observer of direct torque control
图
3.
直接转矩控制磁链观测器
Inverter
Discrete,
Ts = 1e-006 s.
15000
nr*
Iabc
Uabc
Ai
Bi
Ci
Vref
Ao
Bo
Co
Voltage
and
Current
Detector
phialp
phibet
ialp
ibet
Te
Torque Cal.
Te *
Te
HTe
Te Hist.
HTe
Hphi
sec
Gates
Switch Table
Step30/pi
Speed Trans.
m
wm
Speed Meas.
ang sec
Sector
S8
S7
S5
S1
phialp
phibet
ang
phi
Rect to Polar
phi*
phi
Hphi
Phi Hist.
g
A
B
C
+
-
m
A
B
C
Tm
HSMS
nr phi*
Flux Table
iabc
uabc
phialp
phibet
ialp
ibet
Flux Obs.
DC
nr*
nr
Te *
ASR
Figure 4. Direct torque control simulation model of the high-speed motorized spindle
图
4.
高速电主轴直接转矩控制仿真模型
Cop
yright © 2012 Hanspub
10
高速电主轴矢量控制与直接转矩控制仿真及分析
Table 3. Switch table rule of direct torque control
表
3.
直接转矩控制开关表
Swi tch Tab le
规则
Hphi HTe
①
②
③
④
⑤
⑥
1
u
s
2
u
s
3
u
s
4
u
s
5
u
s
6
u
s
1
0
u
s
7
u
s
8
u
s
7
u
s
8
u
s
7
u
s
8
1
–1
u
s
6
u
s
1
u
s
2
u
s
3
u
s
4
u
s
5
1
u
s
3
u
s
4
u
s
5
u
s
6
u
s
1
u
s
2
0
u
s
8
u
s
7
u
s
8
u
s
7
u
s
8
u
s
7
–1
–1
u
s
5
u
s
6
u
s
1
u
s
2
u
s
3
u
s
4
①
②
③
④
⑤
⑥
u
s2
u
s3
u
s4
u
s5
u
s6
u
s1
Figure 5. Switch voltage vectors of direct torque control
图
5.
直接转矩控制开关电压矢量
4.
高速电主轴矢量控制和直接转矩控制
仿真结果及分析
给定转速设为额定转速
15,000 rpm
,空载启动,
在
t = 3 s
时给高速电主轴施加一个
Tm = 10 N·m
的阶
跃负载,观察高速电主轴的转速和转矩响应。
图
6
为
170MD15Y20
型高速电主轴矢量控制
(VC)
和直接转矩控制
(DTC)
仿真的转速响应。从图中可以
看出,矢量控制下,高速电主轴在
2.8 s
附近达到给定
转速
15,000 rpm
,即额定转速,而直接转矩控制响应
稍快,在
2.4 s
附近即达到给定转速。在
3 s
时受到
10
N·m
的阶跃负载,都能保持转速恒定,具有很好的抗
干扰能力。
图
7
为
170MD15Y20
型高速电主轴矢量控制和直
接转矩控制仿真的转矩响应。从图中可以看出,矢量
控制具有较大的启动转矩,这是其转速能在短时间里
达到给定转速的原因。直接转矩控制的启动转矩比矢
量控制的更大,因此能在更短的时间里完成加速。这
还说明直接转矩控制比矢量控制的响应速度更快。在
3 s
时,受到
10 N·m
的阶跃负载,电磁转矩都能对负
载进行快速跟踪,从而保持转速不变。由于矢量控制
的电流和直接转矩控制的磁链、转矩都采用了滞环比
较控制,这实际上是一种开关控制,会导致较大的转
矩脉动。
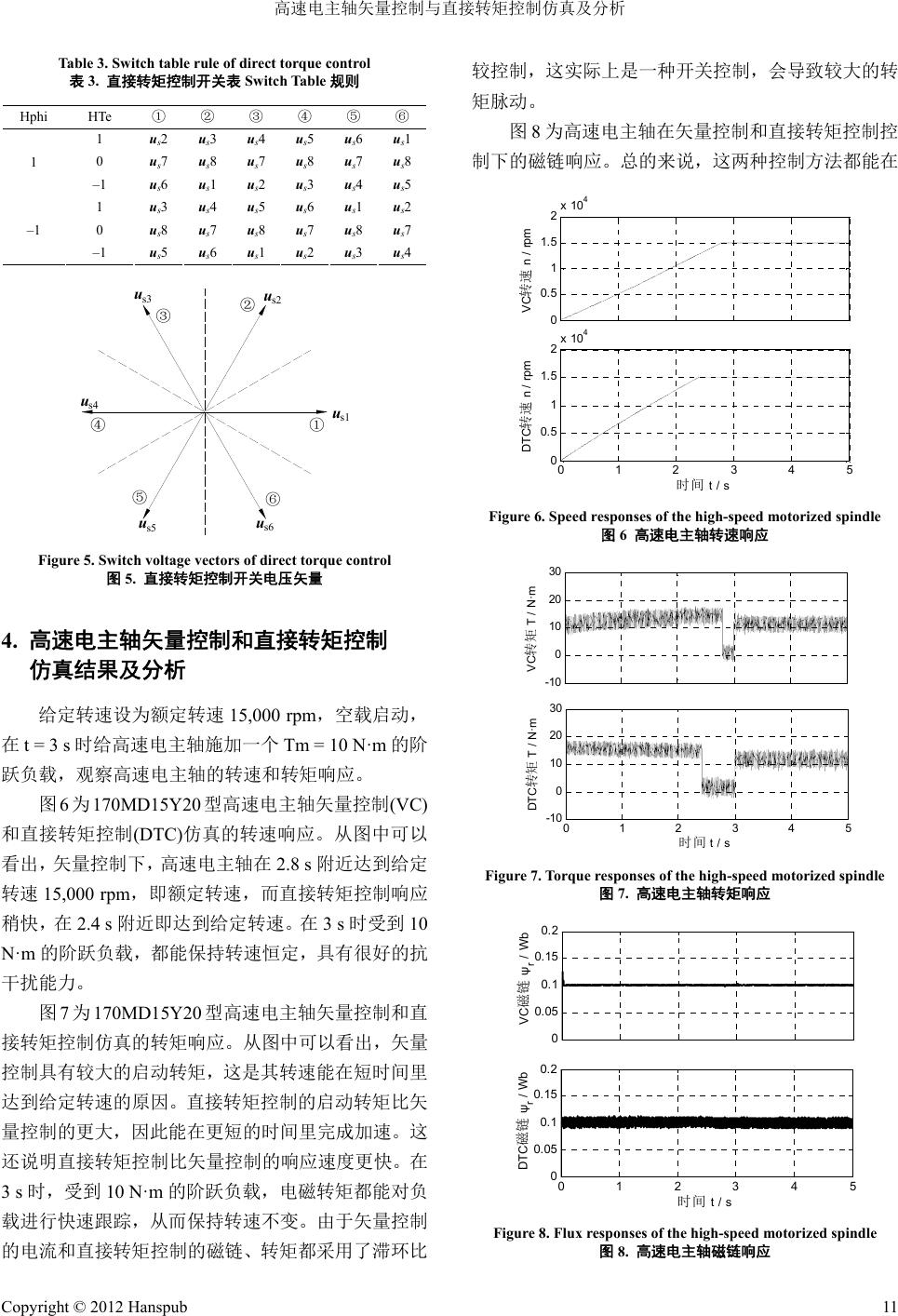
图
8
为高速电主轴在矢量控制和直接转矩控制控
制下的磁链响应。总的来说,这两种控制方法都能在
0
0.5
1
1.5
2
x 10
4
VC
n / rpm
0 12 3 45
0
0.5
1
1.5
2
x 10
4
t / s
DTC
n / rpm
Figure 6. Speed respo ns es o f t he high-speed motorized spindle
图
6
高速电主轴转速响应
-10
0
10
20
30
VC
T / N·m
0 1 23 45
-10
0
10
20
30
t / s
DTC
T / N·m
Figure 7. Torque responses of
the high-speed motorized spindle
图
7.
高速电主轴转矩响应
0
0. 05
0.1
0. 15
0.2
VC
ψ
r
/ Wb
0 12 345
0
0.05
0. 1
0.15
0. 2
t / s
DTC
ψ
r
/ Wb
Figure 8. Flux responses of the high-speed motorized spindle
图
8.
高速电主轴磁链响应
Cop
yright © 2012 Hanspub
11
高速电主轴矢量控制与直接转矩控制仿真及分析
极短时间内使磁链达到给定值
0.1 Wb
,并且在
3 s
受
到
10 N·m
冲击干扰时,仍能保持恒定。但是,直接
转矩控制的磁链脉动比矢量控制的要大,这主要是由
于直接转矩控制的磁链、转矩都为滞环控制的缘故。
5.
结论与展望
仿真结果及分析表明,所建模型是正确的。矢量
控制和直接转矩控制都能对磁链和电磁转矩进行瞬
态独立控制,进而实现对高速电主轴的高性能驱动控
制。矢量控制通过将高速电主轴的三相交流电参量变
换为二相同步旋转坐标系上的直流电参量实现了磁
链和转矩的有效解耦,但需要较多的坐标变换计算。
直接转矩控制直接从电磁转矩和磁链的控制出发构
建控制系统,具有结构简单,更快的动态响应。滞环
控制是一种开关控制方式,结构简单,快速性好,但
会导致较大转矩脉动。
从本文可以看出,尽管矢量控制和直接转矩控制
的控制理论和实现方法存在较大的差异,各有优缺
点,但实际上它们存在着很多的相同点。因此,可以
通过进一步研究它们的共同点,寻找一种能够统一矢
量控制和直接转居控制的方法,以集合这两种控制方
法的优点,避免其缺点。这种方法应该具有更少的计
算量,更好的动态性能。
参考文献
(References)
[1]
F. Blaschke. A new method for the structural decoupling of A.C.
induction machines. IFAC Symposium, 1971.
[2]
M. Depenbrock. Direct self-control (DSC) of inverter-fed induc-
tion machine. IEEE Transactions on Power Electronics, 1988,
3(4): 420-429.
[3]
R. W. De Doncker, F. Profumo, M. Pastorelli, et al. Comparison
of universal field oriented (UFO
) controllers in different refer-
ence frames. IEEE Transactions on Power Electronics, 1995,
10(2): 205-213.
[4]
S. N. Pandya, J. K. Chatterjee.
Torque ripple minimization in
direct torque control based IM drive Part-I: Single-rate control
strategy. In: J. T. Boys, Ed.,
International Conference of Power
System Technology and IEEE Power India Conference, POW-
ERCON, 2008: 1-8.
[5]
陈小安
,
康辉民
,
合烨等
.
无速度传感器矢量控制下高速电
主轴动态性能分析
[J].
机械工程学报
, 2010, 46(7): 96-101.
[6]
张珂
,
徐湘辉
,
王利杰等
. PMAC2
下高速电主轴直接转矩控
制系统设计
[J].
沈阳建筑大学学报
, 2006, 22(4): 691-695.
[7]
王成元
,
夏加宽
,
杨俊友等
.
电机现代控制技术
[M].
北京
:
机械工业出版社
, 2006.
Cop
yright © 2012 Hanspub
12