Mechanical Engineering and Technology
Vol.05 No.04(2016), Article ID:19391,8
pages
10.12677/MET.2016.54042
Kinetic Modeling of a Novel 3-CRU Translational Parallel Mechanism
Dongjie Guo1, Yangmin Li2, Bin Li1
1School of Mechanical Engineering, Tianjin University of Technology, Tianjin
2Faculty of Science and Technology, University of Macao, Macao

Received: Nov. 28th, 2016; accepted: Dec. 24th, 2016; published: Dec. 27th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
This 3-CRU parallel mechanism has three CRU branched chain groups and this parallel mechanism has three characteristics of translational movement direction. In practical application, it does not require so much degree of freedom. Based on the investigation and collecting data, the device needs low degree of freedom. A novel 3-CRU translational parallel mechanism has been designed for adapting to this situation. In this paper, the position and speed of the mechanism are analyzed, and the Jacobi matrix of the mechanism has been obtained. According to the principle of virtual work, we established the kinetic model of 3-CRU translational parallel mechanism. It can provide the help for the researching on the accuracy of precision motion platform.
Keywords:Position Analysis, Kinetic Model, Jacobian Matrix, Virtual Work Principle

一种新型3-CRU并联机构的动力学建模
郭东杰1,李杨民2,李彬1
1天津理工大学机械工程学院,天津
2澳门大学科学技术学院,澳门

收稿日期:2016年11月28日;录用日期:2016年12月24日;发布日期:2016年12月27日

摘 要
3-CRU平动并联机构具有3条CRU支链组,具有三个运动方向上的平动特性,对于目前多数并联机构需要较少自由度这一现状以及在生产中的实际情况,本文根据广发的调查取证,设计并验证了一种全新的3-CRU平动并联机械手,在对机构进位置和速度分析的基础上,得到新机构的第一阶影响系数矩阵,继而采用虚功法建立新型3-CRU平动并联机构运动平台的动力学模型,为精密机构平台的精度划分提供帮助。
关键词 :位置分析,动力学建模,雅可比矩阵,虚功原理

1. 引言
并联机构是一个闭环运动系统,这一系统有多个运动链,每条链的一端都会与一个具有多自由度的移动终端(平台)相连 [1] 。并联机构的这一特点使这种结构拥有许多传统机构所不具备的优点,这些优点的价值在近些年引起了学术界的大量关注。与此同时工业生产也开始大量的采用这类机构。该机构作为一种技术密集型的高新设备,具有高刚度、高承载能力、灵活的末端调节、低惯性,并且机构的末端不会积累误差。这些新出现的特点刚好弥补已有的串联机构带来的不足。在进入二十一世纪以来,大量的研究工作开始转向这个新颖的构型,并逐步挖掘了大量的新构造,使这一构型产生了飞速的发展。从目前的研究方向来看,数量最多的就是六自由度的并联构型 [2] 。但是在长期的现场生产中发现,自由度过高对于生产并不是十分有利,而且会有很大的经济负担。因此我们开始查找是否有经济性更好的设备而且该设备可以满足目前的生产需要。于是少自由度并联机构开始进入人们的视野 [3] [4] 。所谓的少自由度就是减低自由度的机构,虽然机构的自由度减少了,但是这样的机构可以运用在许多特殊的不需要很多自由度的环境中。而这样的设计特征,使机构的组成部件减少了很多,部件的减少意味着结构更轻便,制造和组装更快捷,调试便捷且控制简单。并且这样也使得机构的价格更低廉,便于大规模应用。少自由度的并联机构可以根据实际生产的需要而增加或减少自由度,可以更灵活的适应现场的需求。当然也由于限制了自由度,这一类机构也会产生出很多在六自由度的机构动中没有出现的问题和特质。就目前的场景而言,作为新生事物,这种机构以自有的独特的优点和潜力吸引了大量的研究人员对其进行各方面的研究。而目前的研究方向集中在几个方面,比如构型的研究、机构的位置研究,动力学研究,奇异性研究以、机构的工作空间及机构刚度的研究。这些研究都涉及到了机构的基础理论,在长期的研究中,都取得了良好的效果,所得到的研究结果也各具特色。依据计划,本文将首先对机构的位置正解和逆解进行求解,并以此为基础可以得到机构平台的第一节影响系数矩阵 [5] [6] [7] ,机构的第一阶影响系数矩阵可以有效的建立机构杆件速度与机构动平台速度的映射关系为进一步求解机构的动力学方程做前期准备;建立了并联机构的速度和加速度的第一阶影响系数矩阵,得到矩阵之后采用虚功原理,建立该机构的动力学方程 [8] - [14] 。
2. 3-CRU并联机构的结构描述
本文所分析的3-CRU空间低自由度平动并联机构,在少自由度并联机构当中非常具有代表性,对该机构所进行的研究分析和开发对其他的机构具有一定的借鉴作用。如图1,所分析的机构的组成包括一个动平台、一个定平台以及三个连接动平台、定平台的分支链组成。连接定平台和动平台的三个支链是完全一样的,该支链为CRU支链(C代表圆柱副,R代表转动副,U代表虎克铰)与动平台相连。圆柱副由一个线性制动器驱动可沿轨道移动和旋转,如图2所示,同时三个支链和轨道对称布置,分别相隔120度。通过以上分析可以看到动平台和定平台是连接的关键以及自由度控制的关键是三根CRU支链。
3. 运动学分析
3.1. 并联机构的位置逆解
由于3-CRU平动并联机构具有三条完全相同的支链,因此,三条支链的分析是完全相同的,即只对其中一条进行分析即可。为了便于分析,坐标系XYZ为定坐标,动平台的中心点O是三条撑杆的交汇点,因此如图3所示的坐标体系用来计算。
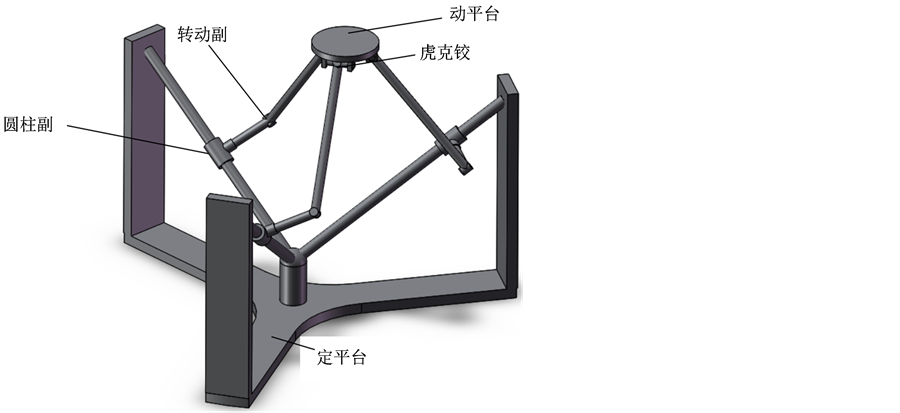
Figure 1. Translational parallel mechanism diagram
图1. 并联机构示意图
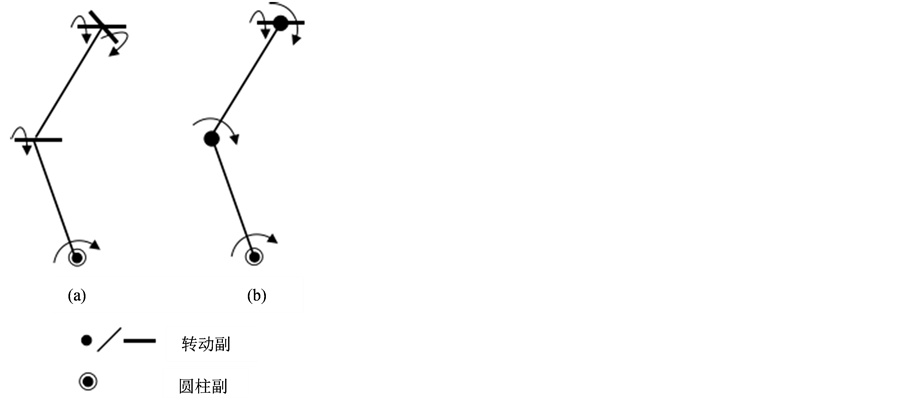
Figure 2. The structure diagram of mechanism
图2. 机构的结构简图
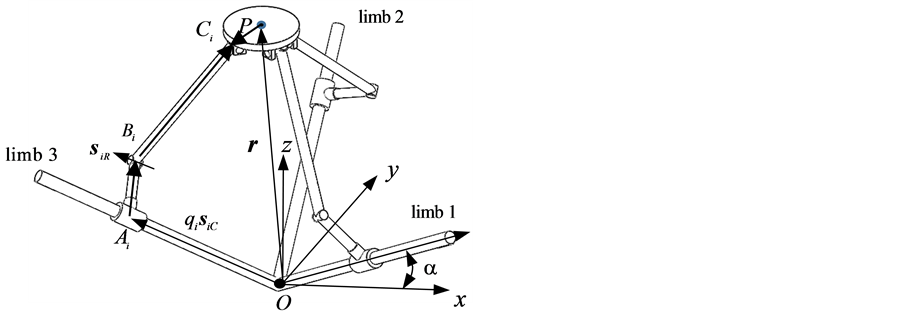
Figure 3. Fixed coordinates system and kinetic coordinate system
图3. 定坐标系和动坐标系
Ai是圆柱关节中心,Bi是旋转关节的中心,Ci是万向节中心,点P是动平台中心。角度 是从基础平台轨道OiAi椭圆测量并且定义为执行器设计的角度,为保证机制的各向同性,我们假设
是从基础平台轨道OiAi椭圆测量并且定义为执行器设计的角度,为保证机制的各向同性,我们假设 。3-CRU并联机构的逆位置分析涉及给定动平台Ai (Ai是向量不是平台位)置的确定。在O-xyz坐标系中位置矢量
。3-CRU并联机构的逆位置分析涉及给定动平台Ai (Ai是向量不是平台位)置的确定。在O-xyz坐标系中位置矢量 位置P可以表示为:
位置P可以表示为:
 (1)
(1)
 代表Ai的位置,Ai是单位向量,
代表Ai的位置,Ai是单位向量, 是从Ai到Bi的向量,
是从Ai到Bi的向量, 是从Bi到Ci的向量,
是从Bi到Ci的向量, 是从P点到Ci.的向量。需要注意的是,对于CRU支链,通过旋转关节施加的约束限制,
是从P点到Ci.的向量。需要注意的是,对于CRU支链,通过旋转关节施加的约束限制, 和
和 是旋转接头的轴的单位向量
是旋转接头的轴的单位向量 。因此,以点积与
。因此,以点积与 对等式(1)两边相乘,得:
对等式(1)两边相乘,得:
 (2)
(2)
因此对于一 定位置
定位置
 的移动平台,Ai的位置可以通过公式(2)直接得到。
的移动平台,Ai的位置可以通过公式(2)直接得到。
3.2. 单位
该机构的位置正解是由动平台Ai的位置所决定的,因此将(2)式展开,结果为:
 (3)
(3)
 (4)
(4)
 (5)
(5)
式(5)减式(4)的结果为:
 (6)
(6)
将(3)、(4)、(5)相加得:
 (7)
(7)
然后(7)减(5)得:
 (8)
(8)
则,任意给定X、Y、Z的值,均可以用方程(6)、(7)、(8)求解。
3.3. 并联机构的雅可比矩阵
分别对式(3)、(4)、(5)的时间进行求导,可得:
 (9)
(9)
 (10)
(10)
 (11)
(11)
将(9) (10) (11)写成矩阵形式,当动平台离开原点,矩阵可逆。
 (12)
(12)
 ,代表第
,代表第 条支链的速度;
条支链的速度; 代表动平台的线速度
代表动平台的线速度
 (13)
(13)
是该机构的雅可比矩阵。当矩阵 为可逆时,式(14)可以写为:
为可逆时,式(14)可以写为:
 (14)
(14)
式(14)代表3-CRU并联机构的坐标速度,在位置的分析和速度的分析的基础上对加速度的分析,即对公式(14)的时间求导,得到加速度的表达式为以下:
 (15)
(15)
其中,H为加速度雅可比矩阵。
4. 并联机构的动力学方程
由前面所得出的速度雅可比矩阵和加速度雅可比矩阵可知上下连杆的速度和加速度分别为:
 (16)
(16)
 (17)
(17)
由式(16)至(19)中:
 (18)
(18)
上面分析3-CRU并联机构各个构件的速度,加速度,本文在末端构件的参考点建立广义坐标系,采用虚功原理建立该机构的动力学模型,建立起系统处于平衡状态时主动力之间的关系,此种方法简单明了,计算简便。假设该机构中各约束力均为理想约束力;所有杆件为质地均匀且规则的几何体,这样即可将杆件质心简化为其几何中心,作用于动平台质心的外力和惯性力可以用下式表示:
 (19)
(19)
式中, 表示在定坐标系中动平台的质心的惯量的矩阵;
表示在定坐标系中动平台的质心的惯量的矩阵; 为运动平台质量;
为运动平台质量; 表示动坐标系
表示动坐标系 相对于定坐标系
相对于定坐标系 的旋转变换矩阵。对于各个支链,假设所受到的重力是构件唯一的外力,则作用在各个构件上的外力和外力矩在定坐标系
的旋转变换矩阵。对于各个支链,假设所受到的重力是构件唯一的外力,则作用在各个构件上的外力和外力矩在定坐标系 中可以用下式表示:
中可以用下式表示:
 (20)
(20)
链所受到的驱动力应与定平台的等效驱动力平衡,即:
 (21)
(21)
其中 ,
, ,
, ,
,
对式(24)简化并移项可得3-CRU并联机构的驱动力,为:
 (22)
(22)
式(25)即3-CRU并联机构的动力学方程。
5. 机构的动力学仿真
在得到动力学模型后,通过分析即可求得机构运动的规律,首先,选定ADAMS作为运动规律的分析平台,3-CRU机构作为一种平动并联机构,可以在任意空间做非翻转运动,根据图1所示,机构末端坐标 与时间t的关系为:
与时间t的关系为:
 (23)
(23)
 (24)
(24)
 (25)
(25)
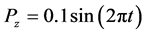
设 可执行一次仿真,得到的仿真曲线如图4~6所示。
可执行一次仿真,得到的仿真曲线如图4~6所示。
图中,JOINT_11,JOINT_12,JOINT_13分别表示并联机构驱动杆的位置。由以上的模拟可以发现机构的位移在变化的同时,机构的驱动杆的速度和加速度都没有发生突变,均是在平稳的变化。这样的变化对于工业生产装备具有很重要的意义。
6. 结语
本文介绍的3-CRU并联机构所具备的结构特点,是根据据我们所研究的平台瞬时的运动模型,推导研究机构出的位置的正解和位置的逆解。之后解该位置模型,采用得到的位置模型得出了机构的速度和
Figure 4. Displacement curve of drive rod
图4. 驱动杆位移变化曲线
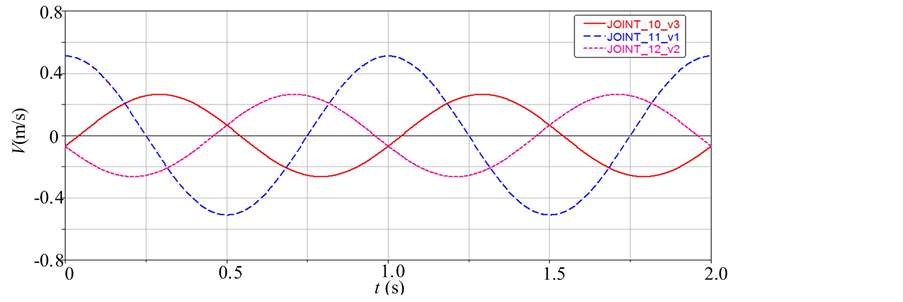
Figure 5. Velocity curve of drive rod
图5. 驱动杆速度变化曲线

Figure 6. Acceleration variation curve of drive rod
图6. 驱动杆加速度变化曲线
加速的一节影响系数矩阵。具备以上条件后求出支链速度与输出速度之间的一阶影响系数矩阵,各构件所受外力的影响情况都参考完毕后,利用虚功原理,建立了机构的动力学模型,结合构造完毕的结构图,运用ADAMS进行机构的动力学分析,所得图表为以后进行进一步研究创造了条件。经过仿真分析,我们可以看到机构的位移在发生变化时机构的速度和加速的的相应变化,机构的位移、速度和加速度的变化都是平稳的,这样在限制自由度的同时保证了机构运动的稳定性,在生产中更能应用于精密的生产过程并且可以保证生产过程的可靠性。
文章引用
郭东杰,李杨民,李彬. 一种新型3-CRU并联机构的动力学建模
Kinetic Modeling of a Novel 3-CRU Translational Parallel Mechanism[J]. 机械工程与技术, 2016, 05(04): 344-351. http://dx.doi.org/10.12677/MET.2016.54042
参考文献 (References)
- 1. 毕树生, 王守杰, 宗光华, 等. 基于牛顿–欧拉法的4-UPS-RPS机构刚体动力学分析[J]. 计算机集成制造系统, 2014, 20(7): 1709-1715.
- 2. 李仕华. 几种空间少自由度并联机器人机构分析与综合的理论研究[D]: [博士学位论文]. 秦皇岛: 燕山大学, 2004.
- 3. Melet, J.P. (2006) Parallel Robots. Kluwer Academic Publishers, London, 1-18.
- 4. 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 北京: 高等教育出版社, 2006: 89-210.
- 5. Lu, S. and Li, Y.M. (2015) Dynamic Dexterity Evaluation of a 3-DOF 3-PUU Parallel Manipulator Based on Generalize Dinertia Matrix. 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, 6-9 December 2015, 1506-1511. https://doi.org/10.1109/ROBIO.2015.7418984
- 6. 温兆麟, 陈新, 敖银辉, 郑德涛. 并联机构应用的域及其构型研究[J]. 机床与液压, 2005, 5(25): 7-11.
- 7. 赵铁石, 黄真. 一种新型四自由度并联平台机构及其位置分析[J]. 机械科学与技术, 2000, 6(19): 927-929.
- 8. Chen, Y.Z., Liu, X.Y. and Chen, X. (2013) Dimension Optimization of a Planar 3-RRR Parallelmanipulator Considering Motion and Force Transmissibility. 2013 IEEE International Conference on Mechatronics and Automation (ICMA), Des Moines, 4-7 August 2013, 670-675. https://doi.org/10.1109/ICMA.2013.6617996
- 9. 白志富, 韩先国, 陈五一. 基于Lagrange 方程三自由度并联机构动力学研究[J]. 北京航空航天大学学报, 2004, 30(1): 51-54.
- 10. Murillo, M.G., Eduardo, C.C. and Jaime, G.A. (2013) Dynamics of a 2(3-RRPS) Parallel Manipulator. 2013 9th Workshop on Robot Motion and Control (RoMoCo), Portland, 3-5 July 2013, 270-275. https://doi.org/10.1109/RoMoCo.2013.6614620
- 11. Tsai, L.W. (2009) The Enumeration of a Class of Three-DOF Parallel Manipulators. The 10th World Congress on the Theory of Machine and Mechanisms, Atlanta, August 2009, 1121-1126.
- 12. 高晓雪. 3-PPR平面并联机构的运动学和动力学性能研究[D]: [硕士学位论文]. 太原: 中北大学, 2014.
- 13. 宋小科. 含约束链的并联4PUS-1RPU机构静力学与动力学分析[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工业大学, 2011.
- 14. 徐东涛. 基于动力学分析的改进型Delta并联机构运动可靠性建模技术[D]: [博士学位论文]. 沈阳: 东北大学, 2015.