Journal of Electrical Engineering
Vol.04 No.01(2016), Article ID:17193,8
pages
10.12677/JEE.2016.41008
Speed Control Strategy of Switched Reluctance Motor
Zhou Du1,2, Dingxiang Wu2,3, Lijun Tang1,2
1School of Physics and Electronic Sciences, Changsha University of Science & Technology, Changsha Hunan
2Hunan Province Higher Education Key Laboratory of Modeling and Monitoring on the Near-Earth Eletromagnetic Environments, Changsha Hunan
3Billion Set Electronic Technology Co, Ltd., Changsha Hunan
![]()
Received: Mar. 1st, 2016; accepted: Mar. 19th, 2016; published: Mar. 24th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Aimed at research on starting mode and speed control of switched reluctance motor speed control system, a two-phase starting is adopted to start the electric, in order to increase the torque and reduce the torque ripple. A fuzzy adaptive PID control algorithm is proposed, and a switched reluctance motor speed control system with STM32 + FPGA as the main controller is designed, applying current chopping in low speed and angle position control mode in high speed, which has a certain effect on solving the problems of high overshoot, slow dynamic response and low accuracy. The experimental results show that the precision of the system speed is within 10 r/min, and the maximum overshoot is 15 r/min.
Keywords:Switched Reluctance Motor, Torque Ripple, Fuzzy Adaptive Tuning PID

开关磁阻电机速度控制
杜舟1,2,吴定祥2,3,唐立军1,2
1长沙理工大学物理与电子科学学院,湖南 长沙
2近地空间电磁环境监测与建模湖南省普通高校重点实验室,湖南 长沙
3长沙亿旭机电科技有限公司,湖南 长沙

收稿日期:2016年3月1日;录用日期:2016年3月19日;发布日期:2016年3月24日

摘 要
针对开关磁阻电机的调速控制系统的起动方式和速度控制开展研究,采用两相绕组通电起动的方式,以增大转矩、减小转矩脉动。提出了模糊–自适应整定PID控制算法,并以STM32 + FPGA为主控制器,应用低速电流斩波、高速角度位置控制方式设计了开关磁阻电机调速系统。对于解决超调量高、动态响应慢的不足、精确度不高的问题有一定的效果。实验结果表明,系统转速的精确度在10 r/min之内,最大超调量为15 r/min。
关键词 :开关磁阻电机,转矩脉动,模糊–自适应整定PID

1. 引言
开关磁阻电机具有可靠性高,起动电流小,控制系统结构简单,调速性能优异的优点,在电动车、纺织机、航空工业及军事工业有广泛应用。周涛 [1] 设计了以ATmega 8单片机作为主控制器芯片,常规PID算法作为控制算法的电动自行车用开关磁阻电机驱动系统。刘芸芸 [2] 在开关磁阻电机调速系统中使用16位单片机芯片80C196KC为核心控制单元,采用常用的模糊控制作为控制方法。宋伟官 [3] 在基于DSP的开关磁阻电机控制系统中使用神经网络控制作为控制方式。
依据电机运行过程中的各阶段物理量的变化,结合实际所需,本系统对电机的起动过程、低速和高速的每个状态都分别采用最优化的控制策略。
2. 开关磁阻电动机结构及原理
开关磁阻电机内部由定子和转子构成,都是凸极结构,由导磁性能良好的硅钢片冲压而成。定子和转子之间存在着很小的缝隙,转子在定子内可以自由转动,内部结构如图1所示。开关磁阻电机的工作机理 [4] 是:磁通总是沿磁导最大的路径闭合。当定子齿和转子齿中心线不重合时,磁导不为最大,磁场产生磁拉力,拉动转子转到磁导最大的位置,即定子齿和转子齿中心线重合处。
3. 开关磁阻电动机起动方式
常用的起动方式是单相绕组通电起动方式 [5] ,当转子处于不同的位置时,电动机所获得的转矩大小不一样的。设定各相转子位置角的参考点为A相电感最小的地方,可以得到电动机的单相绕组通电的转矩特性 [6] ,如图2所示。
单相绕组通电起动方式的最小起动转矩是两相转矩特性曲线相交点处的转矩,当负载转矩大于最小起动转矩时,电机有可能由于带负载能力不足致使起动失败。为尽量避免此情况,使用两相绕组通电方式起动,电机在任何时候都有两相绕组同时通电 [7] ,以提高电机起动转矩和减小起动转矩脉动。忽略磁耦合,两相绕组同时通电起动方式的转矩可近似地认为是由单相通电的各转矩大小相加所得,如图3所示。
两相绕组通电起动方式的起动转矩的最小值等于单相起动方式起动转矩的最大值,带负载能力大大增强,且最大起动转矩与最小起动转矩的比值明显减小,说明转矩脉动减小,同时,若电机所带负载转矩不变时,双相绕组通电起动方式所需的起动电流也要小于单相起动方式的起动电流。
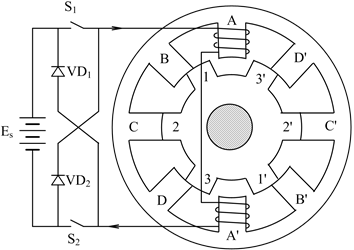
Figure 1. Construction of switched reluctance motor
图1. 开关磁阻电机结构
![]()
Figure 2. Torque characteristics of single phase starting mode
图2. 单相起动方式转矩特性
![]()
Figure 3. Torque characteristics of two phase starting mode
图3. 两相起动转矩特性
4. 控制方式选择
开关磁阻电机的控制参数主要有开通角、关断角、主电路电压和相电流。常用的调速控制方式有:电流斩波控制方式、角度位置控制方式和电压斩波控制方式 [8] ,均有各自的优缺点和适用状态。
4.1. 起动及低速阶段控制方式
开关磁阻电机在起动或低速(额定转速的40%以下)运行时,转速较慢,运动电动势较小,di/dt很大,为防止可能出现的过电流和较大电流尖峰,本系统采取电流斩波方式加以限制。功率管开关导通,电流上升,当电流上升至斩波电流的上限值时,切断绕组电流,电流下降,当电流降至斩波电流的下限值时,功率管开关再次导通,电流再次上升。反复通断功率管开关,形成了在给定电流值附近上下波动的斩波电流。
4.2. 高速阶段控制方式
电机在高速运行时,旋转电动势比较大,相电流比较小,不适合再使用电流斩波方式。在电压、开通角θon、关断角θoff不变的情况下,随着转速ω的增加,磁链和相电流以ω−1下降,转矩以ω−2下降 [9] 。为获得尽量高的效率和较大的转矩范围,使用角度控制方式进行控制,通过改变开通角和关断角的数值实现调速功能。实际运用中,先优化固定关断角,然后闭环调节开通角,对于调速范围较宽的情况,分段优化固定关断角,分别对各段加以调节控制。
4.3. 控制算法的实现
开关磁阻电机调速的目的是使电机快速达到期望的转速,广泛使用的控制算法是常规PID控制和模糊控制。常规PID控制的优点是算法简单、可靠性高,不足是超调量高,动态响应慢。模糊控制对于开关磁阻电机的非线性有着较强的适应性,但是不能达到较高的精度。针对这些问题,本系统采用种模糊自适应整定PID控制算法,以获得较高的稳定性和精确度。
模糊自适应整定PID控制算法根据模糊控制规则在线整定比例因子Kp、Ki和Kd,使系统的性能达到令人满意的水平。该算法以误差e和误差变化ec率作为输入,利用模糊控制规则在线对PID参数进行修改,模糊自适应PID控制器结构如图4所示。
PID参数模糊自适应整定是在运行过程中通过不断检测e和ec,根据模糊控制原理来对PID的3个参数进行在线修改。误差e和误差变化率ec的基本论域是[−3,+3],将其离散成7个等级,即[−3,−2,−1,0,+1, +2,+3],本系统将基本论域定义为负大[NB],负中[NM],负小[NS],零[Z],正小[PS],正中[PM],正大[PB]7个语言变量,然后由e和ec的隶属函数得到相应的模糊变量。系统针对Kp、Ki和Kd 3个参数建立了合适的模糊控制表,以Kp为例,模糊控制规则见表1。
![]()
Figure 4. Fuzzy adaptive PID controller
图4. 模糊自适应PID控制器

Table 1. Fuzzy rule of Kp
表1. Kp模糊规则表
5. 电机速度控制方案实现
5.1. 硬件设计
在开关磁阻电机速度控制系统设计中,通常使用单片机、数字信号处理器等高速性能器件完成设计。开关磁阻电机速度控制系统微处理器的硬件配置和运算速度都有较高的要求,DSP和FPGA两种控制器都能满足开关磁阻电机控制要求。考虑到实际运用中所需电机的转速不定,通电相转换频繁,转子位置信号数据流较多,且FPGA在逻辑处理方面的速度明显优于DSP,所以选择以FPGA + STM32并行处理的方案作为开关磁阻电机调速系统选型,STM32的处理速度比单片机快、I/O接口比单片机多,FPGA并行处理速度快,便于通电相的频繁转化。其中,FPGA负责接受、处理旋转变压器解码板的信号以及驱动输出信号,STM32处理与FPGA的交互信号、电流检测板的输入以及通信,整体硬件框图如图5所示。
5.2. 软件设计
软件设计是控制方式和策略的载体。主程序的主要功能是设置系统时、初始化相关模块、电机起动后电流斩波与角度控制方式的切换,包括初始化子程序、电机起动子程序、电流、速度检测子程序和起动之后速度控制策略切换的程序以及对主控制器内部寄存器进行初始化,A/D模块初始化,I/O口说明,各部分时钟分配等 [10] 。主程序流程图如图6所示,初始化流程图如图7所示。
6. 实验结果和分析
实验使用样机为一台四相8/6极开关磁阻电机,额定功率1.5 KW,额定转速3000 r/min,定子绕组电阻2 Ω,额定电压220 V交流电压。设定转速为1000 r/min,使用两相绕组通电方式起动,可以得到电机的速度响应如图8所示。电机转速有个明显的上升,随后加速趋势变慢直至恒速,从静止状态起动到设定速度需要约350 ms。现改变起动方式,使用单相绕组通电方式起动电机,同样设定速度1000 r/min,可得到该方式下的速度相应曲线,见图9。比较图8和图9,两相绕组通电起动方式下,开关磁阻电机在350 ms的时候转速达到972 r/min,400 ms的时候达到986 r/min。单相起动方式下,电机转速在400 ms的达到965 r/min,500 ms的时候达到980 r/min。可以看出,两相通电起动方式的起动转矩更大,转矩脉动较小,速度响应更快。
在电机恒速运行状态下,改变设定转速,模糊自整定PID控制算法下,电机转速发生突变响应。实验中,电动机恒速运行在500 r/min,改变设定转速为1000 r/min,电机速度响应如图10所示,在350 ms时转速已达到设定转速,由于转动惯量,电机仍处于加速阶段,400 ms附近达到最高转速约1013 r/min。随后电机的转速下降到设定转速以下,并在设定转速值处上下波动,且波动幅度越来越小趋于平稳,电
![]()
Figure 5. System hardware block diagram
图5. 系统硬件框图
![]()
Figure 6. Main program flow chart
图6. 主程序流程图
![]()
Figure 7. Initialization subroutine flow chart
图7. 初始化子程序流程图
![]()
Figure 8. Set speed 1000 r/min (single phase starting)
图8. 设定转速1000 r/min (单相起动方式)
![]()
Figure 9. Set speed 1000 r/min (two-phase starting)
图9. 设定转速1000 r/min (两相起动方式)
![]()
Figure 10. Motor speed change curve (fuzzy adaptive tuning PID)
图10. 电机转速变化曲线(模糊自整定PID)
机完成速度转换的全过程耗时约700 ms。
实验同时采取常规PID算法单独控制,设定转速同为1000 r/min,可以得到常规PID算法控制下电机的速度响应曲线,如图11所示。恒速运行于500 r/min的电机改变设定转速为1000 r/min,电机在400 ms附近达到设定转速,在450 ms时加速至最大速度1024 r/min,之后的电机转速也将在设定的转速附近上下波动,波幅越来越小,突变速响应全程耗时800 ms。
可以看出,模糊自整定PID算法控制,电机转速的超调量小于常规PID算法的超调量,转速达到稳态的时间也更短。高、低速的实验结果表明本系统可以保证转速的精确度在10 r/min之内,突变速响应也表现得不错,在额定转速以下时,系统转速最大超调量为15 r/min,好于常规PID控制和模糊控制的平均超调量。
![]()
Figure 11. Motor speed change curve (conventional PID)
图11. 电机转速变化曲线(常规PID)
7. 结论
用STM32 + FPGA为控制核心器件、采用模糊自适应整定PID为控制算法实现开关磁阻电机速度控制,设计的电机调速控制系统。在起动方式选择上,两相通电起动方式比单相起动方式在实际中运用中的响应速度较快,转矩脉动更小,转矩也较大。在控制策略方面,模糊自适应整定PID控制算法提高了电机的稳定性和精确性。
文章引用
杜 舟,吴定祥,唐立军. 开关磁阻电机速度控制
Speed Control Strategy of Switched Reluctance Motor[J]. 电气工程, 2016, 04(01): 55-62. http://dx.doi.org/10.12677/JEE.2016.41008
参考文献 (References)
- 1. 周涛. 电动自行车用开关磁阻电机驱动系统的研究与实践[D]: [硕士学位论文]. 武汉: 华中科技大学, 2006.
- 2. 刘芸芸. 基于196单片机的开关磁阻电机调速系统设计[D]: [硕士学位论文]. 杭州: 浙江大学, 2005.
- 3. 宋伟官. 基于DSP的开关磁阻电机控制系统研究[D]: [硕士学位论文]. 大连: 大连理工大学, 2005.
- 4. 吴红星. 开关磁阻电机系统理论与控制技术[M]. 北京: 中国电力出版社, 2010: 35-30.
- 5. 孔辉. 开关磁阻电机智能调速控制系统的开发[D]: [硕士学位论文]. 青岛: 青岛工业大学, 2012.
- 6. 石磊. 开关磁阻电机起动过程的研究[D]: [硕士学位论文]. 西安: 西安科技大学, 2010.
- 7. 张魁. 电动车用小功率开关磁阻电机及系统的设计与分析西安[D]: [硕士学位论文]. 济南: 山东大学, 2010.
- 8. 温浩. 开关磁阻电机调速系统研究与设计[D]: [硕士学位论文]. 杭州: 浙江大学, 2012.
- 9. 金英. 3 KW开关磁阻电机调速系统设计[D]: [硕士学位论文]. 杭州: 浙江大学, 2005.
- 10. 段鑫. 基于开关磁阻电机通用控制器的研究[D]: [硕士学位论文]. 长沙: 中南大学, 2013.