Computer Science and Application
Vol.07 No.11(2017), Article ID:22880,7
pages
10.12677/CSA.2017.711126
Design of Remote Monitoring System for Automatic Surface Vehicle
Mengfa Wang, Tao Wang
Beijing Boer Petroleum Development Technology Co., Ltd., Beijing

Received: Nov. 10th, 2017; accepted: Nov. 23rd, 2017; published: Nov. 29th, 2017

ABSTRACT
Along with the ever-increasing importance of marine environmental protection and the demand for marine resources, there has been a pressing demand for monitoring, protection and use of environment in offshore waters. As a result, the development of low-cost small ASVs which can not only cruise and monitor as large monitoring ships do but also enter waters which are unreachable for large monitoring ships so as to conduct special marine environmental monitoring has become one of the focuses of China’s marine equipment circle. Meanwhile, with the development of theories involving wireless communication technology and mobile vehicle remote control, mobile vehicle remote control technology based on wireless communication has become a popular research and application field. Therefore, this paper combines experimental equipment and environment and, from the improvement of real-time ability of remote control system, builds an ASV remote control system on the basis of centerless radio communication system.
Keywords:ASV, Remote Control, PLC, Centerless Radio Communication System, Base Station, Remote Station
自治水上机器人远程监控系统设计
王孟法,王涛
北京康布尔石油发展技术有限公司,北京
收稿日期:2017年11月10日;录用日期:2017年11月23日;发布日期:2017年11月29日

摘 要
随着海洋环境保护的重要性日益增加和对海洋资源需求的不断增大,对近海水域环境的监测、保护和利用的需求也越来越迫切,研制一种既能够像大型监测船一样进行巡航监测,又能够进入大型监测船无法到达的水域完成特定的海洋环境监测任务的小型低成本的自治水面机器人成为摆在我国海洋装备界面前的课题之一;同时由于无线网络通信技术和移动机器人远程监控相关理论的发展,基于无线网络通信的移动机器人远程监控技术成为一个热门的研究和应用领域;因此,本文结合实验设备和环境,从提高远程监控系统的实时性出发构建了一个基于无中心无线电通信系统的自治水面机器人远程监控系统。
关键词 :自治水面机器人,远程监控,PLC,无中心无线电通讯系统,基站,远程站

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
海洋航行器根据其用途和工作特点不用分为三大类:系缆海洋航行器ROV (Remotely Operated Vehicle),自治水下航行器AUV (Automatic Underwater Vehicle)以及自治水面机器人ASV (Automatic Surface Vehicle),简称自航载体。
水面自航载体ASV的特点:环境适应性强,活动灵活,可以冲破人工和大船的极限进行近距离观测;体积小,使用方便,便于在大船上布放和回收;可以根据水声信号遥控或者预设程序控制;有自主动力,水面运行时间较长,有源噪声低。
上世纪60年代出现了海洋航行器,主要用于军事、海洋资源开发、海洋环境监测和海洋工程等领域。美、英、俄、德、法等国在ROV和AUV技术方面的研究起步较早,其研究和应用都处于世界领先地位 [1] [2] [3] 。
我国国内研究机构从90年的初期开始研发海洋航行器,现在包括中科院沈阳自动化研究所,中科院海洋研究所,上海交大,哈尔滨工程大学等多家单位从事相关项目的研发工作,所研发的海洋航行器主要用于海洋工程、水下检测和救援等领域。
目前在海域或江河里行驶的船舶中,无线电方式依然是主要的通讯方式 [4] ,主要依靠国际海事卫星、电缆和水声信道。电缆通讯不仅费用昂贵而且距离有限;水声信道方面,由于海洋信道的复杂性和信道对高频声波的衰减性大,使得水下通信遇到了严重的障碍 [5] 。中科院沈阳自动化所研制的水面救助机器人样机,是通过无线模拟信号遥控方式,可控距离在1000 m内,且只能点对点实现单向指令传输 [6] 。但在可能施放多个水面机器人(ASV)和双向通讯的场合,这种简单的遥控方式就不适应实际的需要了。因此提高船用无线电的智能性、实时性是一个有待解决的难题。已有研究者利用无线电台提出了一些无线电台通讯的改进设计方案,且成功运用于煤矿和石油开采等现场。但他们的研究方案只能利用少数具有辅助功能扩展口的无线电台来实现,因为大部分并不具有辅助功能扩展接口的船舶无法适用。我们研究室研发了一套点对点全双工无中心无线电通讯系统。
2. 远程监控系统组成
如图1所示,整个远程监控系统由基站单元、远程站单元和传输通道三部分构成。
1) 基站单元
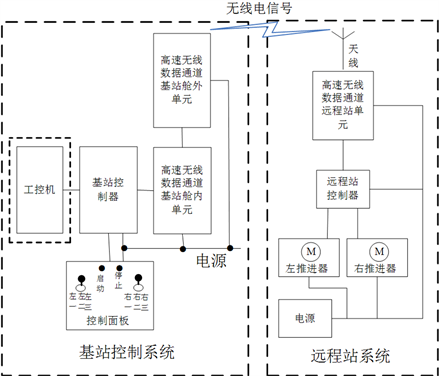
Figure 1. Schematic diagram of telemetering and remote control system
图1. 远程监控系统框图
基站,又称母站或母船,是主机端,其控制系统或安装在陆地上,或安装在大型轮船上,通过操作主机和控制面板来控制远程站(客户端ASV),如图1左侧虚线框所示。
基站端监控系统主要由无线单元、基站控制器、控制开关和工控机等组成。
2) 远程站单元
远程站,是自治水面机器人ASV,是客户端,是我们的远程监控的对象,它游弋在海面上,如图1右侧虚线框所示。
ASV端监控系统主要由无线终端、远程站控制器、电机控制电路、推进电机和搭载装备等组成。
3) 传输通道
基站与远程站之间的信号传输载体是无线电波,其传输介质是大气。
3. 系统硬件设计
3.1. 基站硬件设计
基站,又称母站或母船,是主机端,其控制系统或安装在陆地上,或安装在大型轮船上,通过操作主机或控制箱来控制客户端ASV,硬件电气接线图如图2所示。用户数据适配器和基站收发器之间是Airspan 公司的数据线连接的,室内数据收发器和西门子CP 243-1工业以太网通讯处理器之间是用八针RJ45连接起来的,CP 243-1工业以太网通讯处理器与PLC和扩展模块之间有专用的接口和数据线。PLC的I/O口的输入,是由控制面板的各个按钮或摇柄的电信号。图中PLC的输出为虚输出,实际中是悬空的。
其主要功能:
1) 通过无线局域网给ASV发射遥控指令;2) 通过无线局域网修改ASV参数;3) 接受ASV的反馈信息,并在工控机上显示;4) 在工控机上实现各种其他操作。
3.2. 远程站硬件设计
此系统是ASV的遥测遥控系统。我们研制的ASV是双桨无舵的水面机器人,它靠左右两螺旋桨不

Figure 2. Hardware connection diagram of base station monitoring system
图2. 基站监控系统硬件连线图
同的动力改变运行方向,两螺旋桨三级调速三个档位。硬件电气接线图如图3所示。室内数据收发器和室外射频单元之间是Airspan 公司的数据线连接的,室内数据收发器和西门子CP 243-1工业以太网通讯
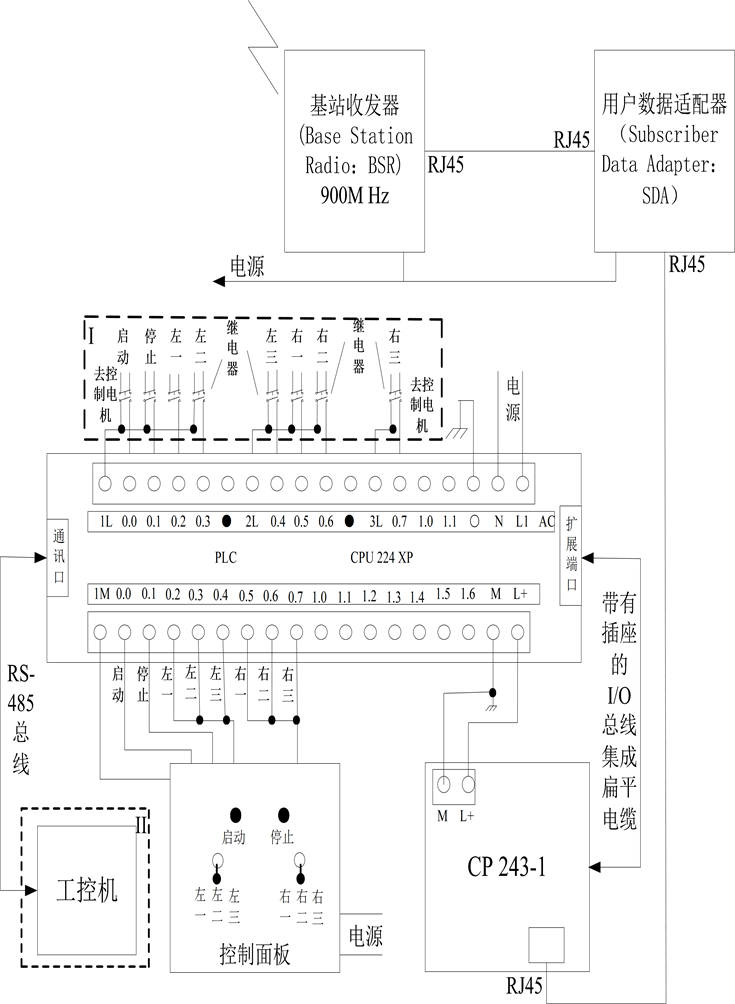
Figure 3. Hardware connection diagram of ASV remote monitoring system
图3. ASV远程监控系统硬件连线图
处理器之间是用八针RJ45连接起来的,CP 243-1工业以太网通讯处理器与PLC和扩展模块之间有专用的接口和数据线,在此不做介绍。
PLC的I/O口的输出,去控制继电器的通断,以达到控制电源供给双桨电机电压大小,实现对ASV的运动控制。
其主要作用:
1) 接受母船站的命令并解码;2) 并控制ASV的运行;3) 反馈ASV的信息。
4. 系统软件设计
通信采用单主站方式,基站PLC为主站,多台远程站PLC作为从站(目前只有一个远程站ASV)。主站采用广播方式主动向所有远程站发送包含从站站址的读/写命令帧,每次被计算机指定站址的一台PLC收到后返回响应帧。
此时主站与从站的S7-200 PLC组态,主从站之间是设置为自由端口通信协议。只有当CPU处于RUN模式时才能进行自由端口通信,当CPU处于STOP模式时自由端口通信被停止。
4.1. 基站软件设计
基站监控系统命令运行流程如图4所示。
在命令发射前首先设定和确定好被控对象的地址,指定唯一控制对象。被控对象确定后,对其控制。由控制面板的按钮或摇柄给PLC的I/O输入信号,经过CPU的运行,生成控制指令数据,存储在基站CPU的特殊寄存器M0中(基站PLC没有I/O输出信号),若还有其他指令,如工控机要求指令,则一起暂存在发射缓冲区内(M0中的数据转换到发射缓冲区数据区首个字节里),然后通过基站的基站收发器(BSR)传输给指定控制对象。
基站接收ASV信息回复,和远程站接收信号的过程相似,只是基站接收数据是主动请求的远程站回复,地址是预先设定唯一的。
4.2. 远程站软件设计
ASV监控系统命令运行流程如图5所示。

Figure 4. Operational process of base station monitoring system command
图4. 基站监控系统命令运行流程
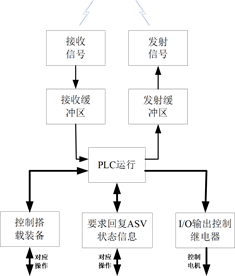
Figure 5. Operational process diagram of ASV monitoring system commands
图5. ASV监控系统命令运行流程
ASV的室外射频单元(SPR)在校对好地址确定后,接收基站传来的无线电信号,然后通过室内数据收发器(IDR)传输给PLC的CPU,先存储在接收缓冲区,然后PLC的CPU以此数据运行,进行进一步操作。
ASV信息回复和基站是一样的过程,是由基站控制的。
部分程序如下:
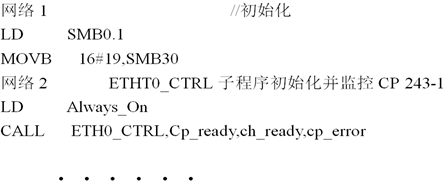
相关组态的数据块(略)。
5. 结论
本文在分析和总结前人的研究成果的基础上,提出了自己的监控系统设计。经海上试验表明,此系统在只有一点对一点的双向数据传输时,到达3千米处时通信质量良好,但是随着远程站的增多,考虑多个远程站同时运行的情况,即当在一个从站的数据包时间间隔之间,有另一从站的数据包达,此时可能会导致一定的重传或丢包,相关工作有待于进一步深入研究。
文章引用
王孟法,王 涛. 自治水上机器人远程监控系统设计
Design of Remote Monitoring System for Automatic Surface Vehicle[J]. 计算机科学与应用, 2017, 07(11): 1118-1124. http://dx.doi.org/10.12677/CSA.2017.711126
参考文献 (References)
- 1. 章静. 核化侦察机器人的研究[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工业大学, 1993: 3-9.
- 2. (1984) Report on the System Design of a Full Automatic Load-Haul-Dump Vehicle in Underground Mining. Rohotto (Robot). No. 45, 38-45.
- 3. 刘小民. 采矿不用下井[J]. 机器人技术及应用, 1997(5): 15-17.
- 4. John, G. (2001) Proakis Digital Communications [M]. 北京: 电子工业出版社, 2001.
- 5. 李锡群, 等. 无人水下航行器(UUV)技术综述[J]. 船舶技术, 2003(6): 12-14.
- 6. 科技合作. 我国发明水面救助机器人[EB/OL]. http://www.fmprc.gov.cn/ce/cgkhb/chn/kjhz/t116608.htm, 2004-05-22.