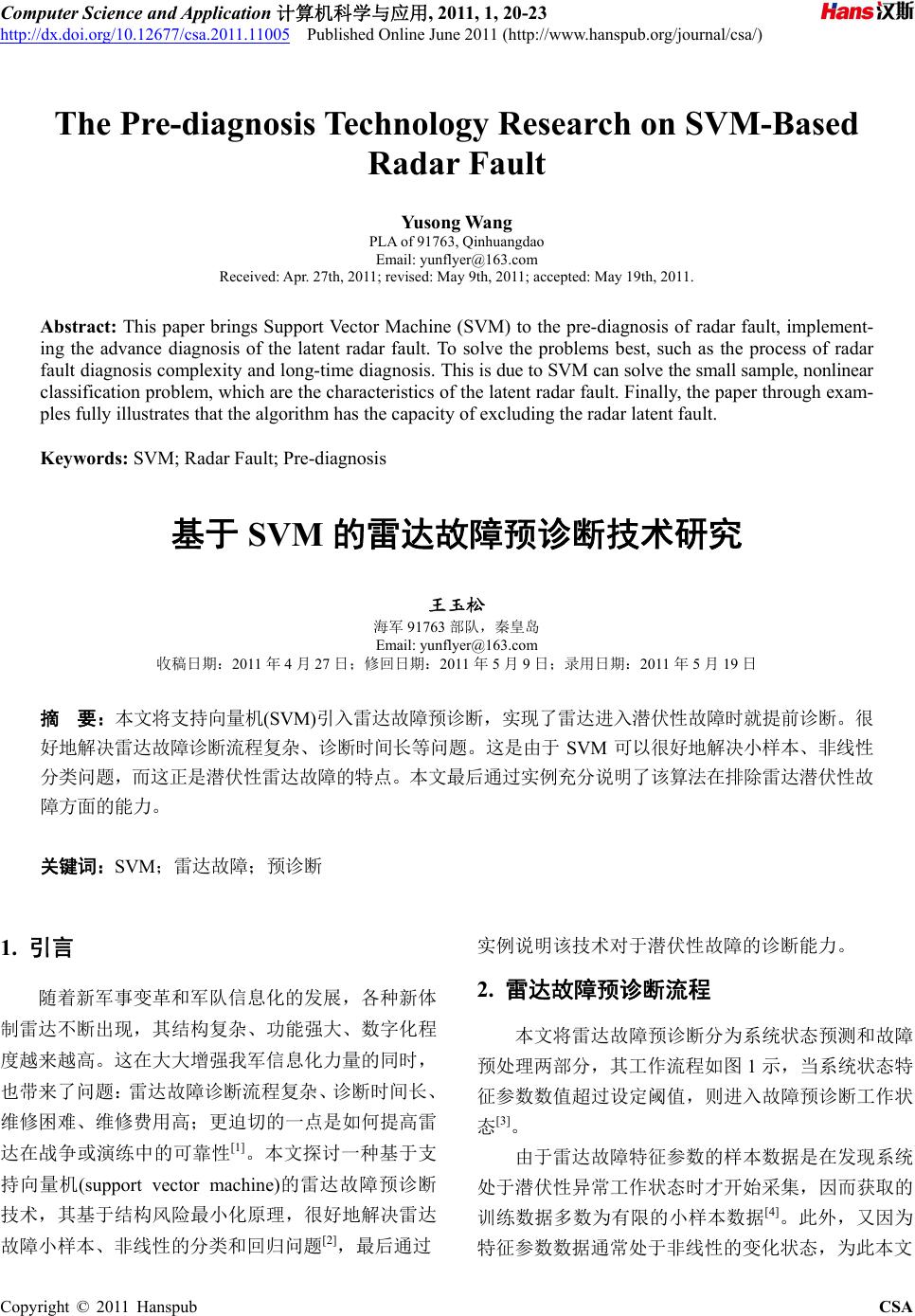
 Computer Science and Application计算机科学与应用, 2011, 1, 20-23 http://dx.doi.org/10.12677/csa.2011.11005 Published Online June 2011 (http://www.hanspub.org/journal/csa/) Copyright © 2011 Hanspub CSA The Pre-diagnosis Technology Research on SVM-Based Radar Fault Yusong Wang PLA of 91763, Qinhuangdao Email: yunflyer@163. com Received: Apr. 27th, 2011; revised: May 9th, 2011; accepted: May 19th, 2011. Abstract: This paper brings Support Vector Machine (SVM) to the pre-diagnosis of radar fault, implement- ing the advance diagnosis of the latent radar fault. To solve the problems best, such as the process of radar fa u lt d i ag no s is c o mp le x it y a n d l on g- t ime d ia g no s i s. This is du e to SVM can so lve the s mall sa mple, n onlinear classification problem, which are the characteristics of the laten t radar fault. Finally, the paper through exam- ples fully illustrates that the algorithm has the capacity of excluding the radar latent fault. Keywords: SVM; Radar Fault; Pre-diagnosis 基于 SVM 的雷达故障预诊断技术研究 王玉松 海军 91763 部队,秦皇岛 Email: yunflyer@163. com 收稿日期:2011 年4月27日;修回日期:2011 年5月9日;录用日期:2011 年5月19 日 摘 要:本文将支持向量机(SVM)引入雷达故障预诊断 ,实现了雷达进入潜 伏性故障时就 提前诊断。很 好地解决雷达故障诊断流程复杂、诊断时间长等问题。这是由于 SVM 可以 很好地解决小样本、 非线性 分类问题,而这正是潜伏性雷达故障的特点。本文最后通过实例 充分说明了该算法 在排除雷达潜伏性故 障方面的能力。 关键词:SVM;雷达故障;预诊断 1. 引言 随着新军事变革和军队信息化的发展,各种新体 制雷达不断出现,其结构复杂、功能强大、数字化程 度越来越高。这在大大增强我军信息化力量的同时, 也带来了问题:雷达故障诊断流程复杂、诊断时间长、 维修困难、维修费用高;更迫切的一点是如何提高雷 达在战争或演练中的可靠性[1]。本文探讨一种基于支 持向量机(support vector machine)的雷达故障预诊断 技术,其基于结构风险最小化原理,很好地解决雷达 故障小样本、非线性的分类和回归问题[2],最后通过 实例说明该技术对于潜伏性故障的诊断能力。 2. 雷达故障预诊断流程 本文将雷达故障预诊断分为系统状态预测和故障 预处理两部分,其工作流程如图 1示,当系统状态特 征参数数值超过设定阈值,则进入故障预诊断工作状 态[3]。 由于雷达故障特征参数的样本数据是在发现系统 处于潜伏性异常工作状态时才开始采集,因而获取的 训练数据多数为有限的小样本数据[4]。此外,又因为 特征参数数据通常处于非线性的变化状态,为此本文 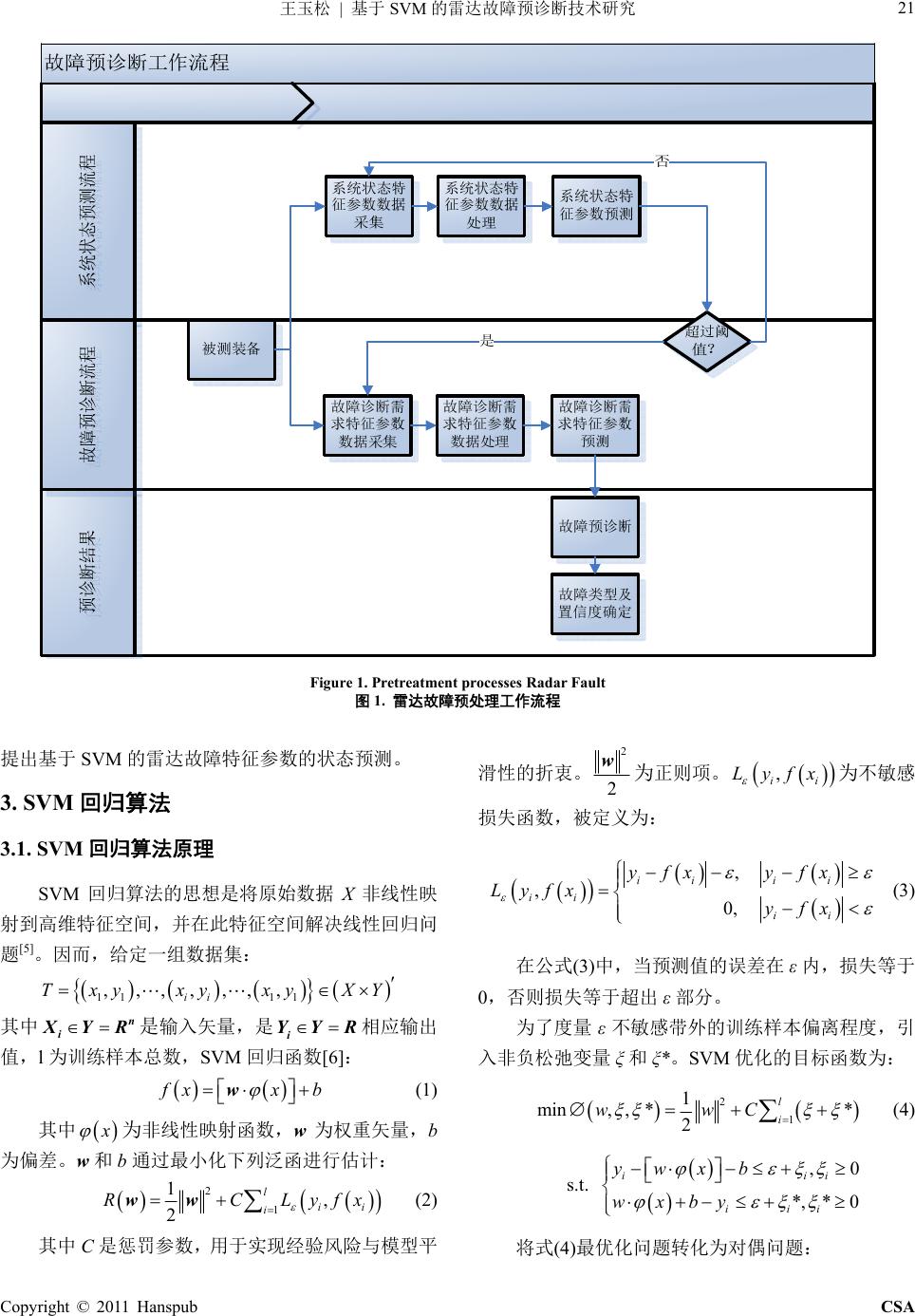 王玉松 基于的雷达故障预诊断技术研究21 | SVM Figure 1. Pretreatment processes Radar Fault 图1. 雷达故障预处理工作流程 提出基于 SVM的雷达故障特征参数的状态预测。 3. SVM回归算法 3.1. SVM回归算法原理 SVM 回归算法的思想是将原始数据 X非线性映 射到高维特征空间,并在此特征空间解决线性回归问 题[5]。因而,给定一组数据集: 11 11 ,,,,,,, ii TxyxyxyXY 其中 n i X YR 是输入矢量,是 相应输出 值,l为训练样本总数,SVM 回归函数[6]: i YYR f xx wb (1) 其中 x 为非线性映射函数,w为权重矢量,b 为偏差。w和b通过最小化下列泛函进行估计: 2 1 1, 2 l ii i RCLyf ww x (2) 其中 C是惩罚参数,用于实现经验风险与模型平 滑性的折衷。 2 2 w为正则项。 为不敏感 损失函数,被定义为: , ii Lyfx , , 0, ii ii ii ii yfx yfx Lyfx yfx (3) 在公式(3)中,当预测值的误差在 ε内,损失等于 0,否则损失等于超出ε部分。 为了度量 ε不敏感带外的训练样本偏离程度,引 入非负松弛变量ξ和ξ*。SVM优化的目标函数为: 2 1 1 min, ,** 2 l i wwC (4) s.t. ,0 *, *0 ii iii ywxb wxby i 将式(4)最优化问题转化为对偶问题: Copyright © 2011 Hanspub CSA 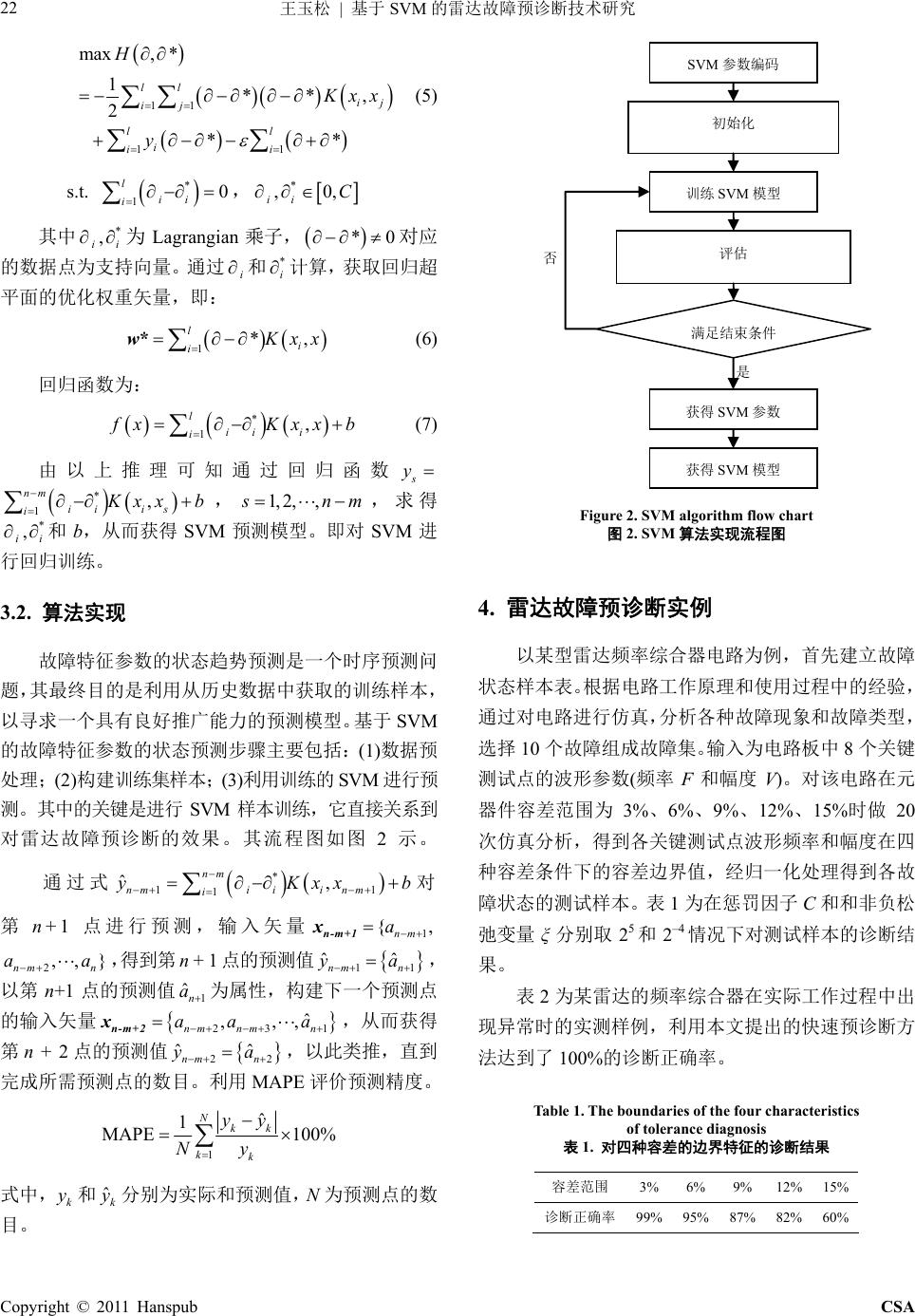 王玉松 基于的雷达故障预诊断技术研究 22 | SVM 11 11 max, * 1**, 2 ** ll ij ij ll i ii H K xx y (5) s.t. , * 10 l ii i * ,0, ii C 其中 为Lagrangian 乘子, 对应 的数据点为支持向量。通过 * , ii *0 i 和 计算,获取回归超 平面的优化权重矢量,即: * i 1*, l i i K xx *w (6) 回归函数为: * 1, l ii i i f xKxx b (7) 由以上推理可知通过回归函数s y * 1, nm ii is i K xx b ,1, 2,, s nm ,求得 和b,从而获得 SVM预测模型。即对 SVM 进 行回归训练。 * , ii 3.2. 算法实现 故障特征参数的状态趋势预测是一个时序预测问 题,其最终目的是利用从历史数据中获取的训练样本, 以寻求一个具有良好推广能力的预测模型。基于 SVM 的故障特征参数的状态预测步骤主要包括:(1)数据预 处理; (2)构建训练集样本;(3)利用训练的SVM 进行预 测。其中的关键是进行 SVM 样本训练,它直接关系到 对雷达故障预诊断的效果。其流程图如图 2示。 通过式 * 1 1 ˆ, nm nmiii nm i yKxx nm a 1 b对 第n+1 点进行预测,输入矢量 1 {, n-m+1 x 2,,} nm n a a,得到第 n + 1点的预测值 11 ˆn ˆnm ya 1 ˆn a 23 1 ˆ ,,, nm nmn aa a n-m+2 , 以第 n+1 点的预测值 为属性,构建下一个预测点 的输入矢量 ,从而获得 第n + 2点的预测值 x 22 ˆˆ nm n ya ,以此类推,直到 完成所需预测点的数目。利用MAPE 评价预测精度。 1 ˆ 1 MAPE 100% Nkk kk yy Ny 式中, 和分别为实际和预测值,N为预测点的数 目。 k yˆk y 初始化 训练 SVM模型 SVM 参数编码 评估 获得 SVM参数 获得 SVM模型 满 足结 束条件 是 否 Figure 2. SVM algorithm flow chart 图2. SVM算法实现流程图 4. 雷达故障预 以某型雷达频率综合器电路为例,首先建立故障 和使用过程中的经验, 通过 5 –4 时的实测样例,利用本文提出的快速预诊断方 法达 Ta ble 1. daries of the four characteristics sis 表1. 对四种容差的边界特征的诊断结果 诊断实例 状态样本表。根据电路工作原理 对电路进行仿真,分析各种故障现象和故障类型, 选择 10个故障组成故障集。输入为电路板中 8个关键 测试点的波形参数(频率 F和幅度V)。对该电路在元 器件容差范围为3%、6% 、9%、12%、15%时做 20 次仿真分析,得到各关键测试点波形频率和幅度在四 种容差条件下的容差边界值,经归一化处理得到各故 障状态的测试样本。表1为在惩罚因子 C和和非负松 弛变量 ξ分别取2和2情况下对测试样本的诊断结 果。 表2为某雷达的频率综合器在实际工作过程中出 现异常 到了 100%的诊断正确率。 The boun of tolerance diagno 容差范围 3%6% 9% 12% 15% 诊% 断正确率 99%95% 87% 82% 60 Copyright © 2011 Hanspub CSA 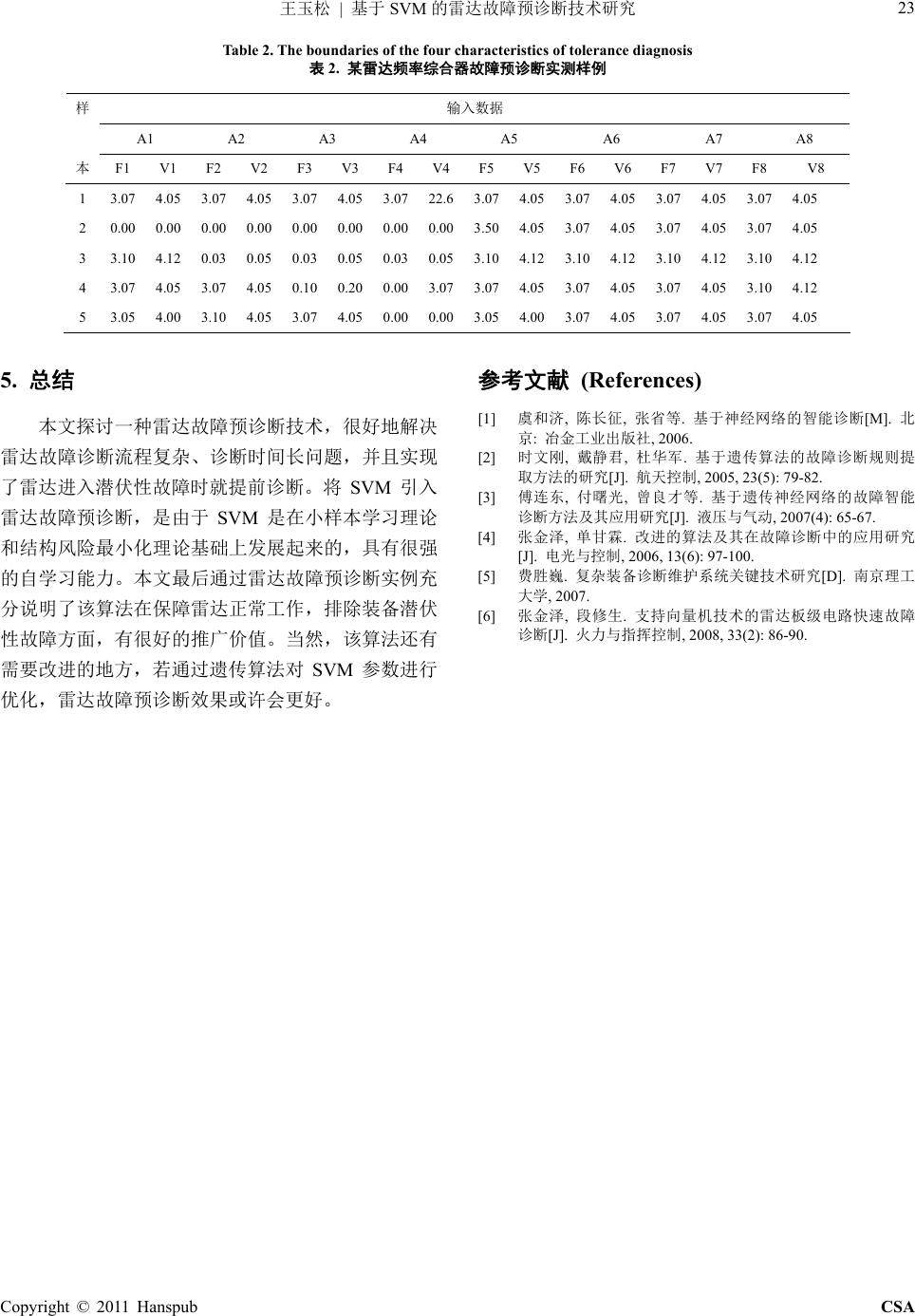 王玉松 | 基于 SVM 的雷达故障预诊断技术研究 Copyright © 2011 Hanspub CSA 23 able four characteristics of tolerance diagnosis 2. 综合器故障预诊断实测样例 Te 2. The boundaries of th 某雷达频率表 输入数据 A1 A2 A7 A8 A3 A4 A5 A6 样 F1 V1 F2 V2 F3 V3 F4 VV5F6 V6F7 V7 F8 V8 本 4F5 1 3.07.05 3.0705 3.07.053.0763.07053.0753.0707 44. 422.4.4.04.05 3.4.05 2 0.00 0.00 0.000.00 0.00 0.000.000.003.504.053.074.053.074.05 3.07 4.05 3 3.10 4.12 0.030.05 0.03 0.050.030.053.104.123.104.123.104.12 3.10 4.12 4 3.07 4.05 3.074.05 0.10 0.200.003.073.074.053.074.053.074.05 3.10 4.12 5 3.05 4.00 3.104.05 3.07 4.050.000.003.054.003.074.053.074.05 3.07 4.05 5. 总结 了雷 e s) [1] 虞和济, 陈长征, 张省等. 基于神经网络的智能诊断[M]. 北 [2] 时文刚, 遗传算法的故障诊断规则提 基于遗传神经网络的故障智能 的应用研究 理工 达板级电路快速故障 本文探讨一种雷达故障预诊断技术,很好地解决 雷达故障诊断流程复杂、诊断时间长问题,并且实现 达进入潜伏性故障时就提前诊断。将 SVM 引入 雷达故障预诊断,是由于 SVM 是在小样本学习理论 和结构风险最小化理论基础上发展起来的,具有很强 的自学习能力。本文最后通过雷达故障预诊断实例充 分说明了该算法在保障雷达正常工作,排除装备潜伏 性故障方面,有很好的推广价值。当然,该算法还有 需要改进的地方,若通过遗传算法对SVM 参数进行 优化,雷达故障预诊断效果或许会更好。 参考文献 (Refernce 京: 冶金工业出版社, 2006. 戴静君, 杜华军. 基于 取方法的研究[J]. 航天控制, 2005, 23(5): 79-82. [3] 傅连东, 付曙光, 曾良才等. 诊断方法及其应用研究[J]. 液压与气动, 2007(4): 65-67. [4] 张金泽, 单甘霖. 改进的算法及其在故障诊断中 [J]. 电光与控制, 2006, 13(6): 97-100. [5] 费胜巍. 复杂装备诊断维护系统关键技术研究[D]. 南京 大学, 2007. [6] 张金泽, 段修生. 支持向量机技术的雷 诊断[J]. 火力与指挥控制, 2008, 33(2): 86-90. |