 Modeling and Simulation 建模与仿真, 2013, 2, 1-7 http://dx.doi.org/10.12677/mos.2013.21001 Published Online February 2013 (http://www.hanspub.org/journal/mos.html) Copyright © 2013 Hanspub 1 Dynamic Response Modeling and Simulation in Shallow Water Acoustic Channel Xiaoqun Zhao, Kai Shen, Lizhi Li College of Electronics and Information Engineering, Tongji University, Shanghai Email: zhao_xiaoqun@tongji.edu.cn, shengfzysk12345@163.com, richllz@163.com Received: Dec. 3rd, 2012; revised: Dec. 13th, 2012; accepted: Dec. 29th, 2012 Abstract: Underwater acoustic communication system must match the communication channel in order to achieve a good performance. How to simulate for such a complex channel has become a hot research. This paper studied the shallow water acoustic channel modeling and simulation method. Using BELLHOP Gauss-ray beam tracing algorithm, modeled the multipath characteristics of the Shallow Water Acoustic Channel. Aiming at the lack of the traditional ray beam method, modeled a dynamic response channel. Simulated and analyzed the Doppler effect of the spectrum. The result showed that the Doppler shift was consistent with the theoretical value, which proved the effectiveness of the design. Keywords: Shallow Water; Underwater Acoustic Channel; Multi-Path; Doppler 浅海水声信道动态响应建模与仿真研究 赵晓群,沈恺,李立志 同济大学电子与信息工程学院,上海 Email: zhao_xiaoqun@tongji.edu.cn, shengfzysk12345@163.com, richllz@163.com 收稿日期:2012 年12 月3日;修回日期:2012年12月13 日;录用日期:2012 年12月29 日 摘 要:水声通信系统必须与海洋通信信道相匹配才能达到良好的通信性能,如何对这样一个复杂多变的信道 环境进行建模和仿真成为了一个研究的热点。本文主要研究浅海水声信道的仿真建模方法。利用 BELLHOP 高 斯射线束跟踪法,对浅海信道的多途特性进行了建模;针对传统声线模型在信道动态响应建模上的不足,提出 了一种新型的动态响应信道建模方法,仿真了信道的多途多普勒效应。分析了不同条件下信号的频谱规律。仿 真结果与理论值相符,证明了模型的有效性。 关键词:浅海;水声;多途;多普勒 1. 引言 浅海水声的强多途特性、时变特性和长时延特性 一直制约着浅海通信的发展。通信技术的选择以及声 呐探测的实现都高度的依赖于所处的信道环境。只有 在对信道的特性进行深入的研究和了解之后,才能把 现有的行之有效的通信技术运用其中。作为解决这一 问题的关键课题,浅海水声信道建模孕育而生,并越 来越受到各国研究人员的重视。 具体来说,水声建模主要是利用声场理论和射线 理论对浅海、深海的各项传播特性参数综合建立物理 模型,运用该模型来模拟声信号在真实水文环境中的 传播过程。由于海浪的运动、收发端的运动等因素, 实际的水声信道是一个时变的信道。目前大部分仿真 模型所建立的都是收发端处于特定条件之下的静态 通信信道。文献[1]运用射线模型研究了我国典型海底 的声场传播情况;文献[2]模型给出了各种水声信道的  浅海水声信道动态响应建模与仿真研究 Copyright © 2013 Hanspub 2 冲激响应函数,包括均匀介质信道、负声速梯度信道 及深海声道轴信道。文献[3]研究了浅海声场的纵相关 半径及其与频率的关系。 近年来,信道仿真技术已成为通信系统中重要的 设计及分析的工具。BELLHOP 是由M. B. Porter 编写 的用于计算水声传播的射线跟踪法程序[4]。根据各种 信道传播的模型,对水声通信信道进行建模。其核心 算法由 FORTRAN 语言写成作为 MATLAB 声学工具 箱的一部分,可以模拟给定垂直声速梯度分布海洋波 导中的二维声场。目前,应用BELLHOP 对浅海水声 信道进行仿真研究的报道比较少,本文利用 BELLHOP 模型对浅海水声信道进行建模研究。针对 传统模型的不足,引入收发端的相对运动参数,构建 了一种改进型的动态信道模型,最后对仿真结果和理 论值进行了对比与分析。 2. 理论分析 2.1. 基于高斯射线束跟踪法的 BELLHOP 模型 射线模型通过解声线方程来得到声线的坐标、幅 值以及声压场[5]。BELLHOP 假设某一声线在传播过 程中的声压 P为: ,, j Psn Assne (1) 式中, 为圆频率, A 为沿声线方向的振幅, 为垂直于声线方向的影响函数, s 为沿切线方向的弧 长, n 为垂直于声线中心方向的位移, 为声线的传 播时间。 对于一个圆柱对称的系统,它的声线方程可以写 作[6]: 2 2 d d d1 d d d d1 d rcs s c s r c zcs s c s z c (2) 式中, rs和 zs代表柱坐标系中声线的坐标, s 是 沿着声线方向的弧长; cos s s c , sin s s c , s 为声线的掠射角。 rs, zs, s 和 s 的初始值为: 0 0 0 0 0 0 0 0 cos 0 sin 0 rr zz c c (3) 式中, 0 代表发射角; 00 ,rz 是声源的位置; 0 c是声 源所在处的声速。通过声线方程可以对声线的传播轨 迹进行计算。 声线的传播时间由式(4)给出: 1d s cs (4) M. B. Porter等人通过采用高斯近似方法较好地 处理了传统声线仿真中能量焦散和声影区等问题,适 用于复杂环境下距离相关声线传播的计算。通过引入 约束变量 p和q可控制高斯束的能量分布[7] d d qcsps s 2 d d nn c p scsqs 式中, nn c是声速在声线路径法线方向上的二阶导数。 式(1)中的 、 A 可表示为高斯声线宽度W的函数: 2 ,e nW ns 14 12cos (0) (2π) c As crW 其中,高斯声线宽度W为 0 qs Wc 式中, 表示临近声线夹角的微分。将声线沿弧长 的声压 , j Psn转化到柱坐标系中得 , j Prz,采用半 相干的方法计算总的声压 s P,结果为: 1/2 2 1 ,, N sj j PrzU Prz (5) 式中, U 是与掠射角 有关的声线振幅权重函数, 20 0 sin 2sin z Uc ;N为本征声线的个数,0 z和 0 c分别为声源的深度和声速。最终的传播损失表达式  浅海水声信道动态响应建模与仿真研究 Copyright © 2013 Hanspub 3 为: 1 , 20 lg, s sr Prz TL Prz (6) 通过式(5) 和(6) 可以计算得到接收信号的能量和 幅值信息。 2.2. 多普勒效应 1) 多普勒展宽 当收发端存在相对运动时,由于 多普勒效应,接收信号在频域会产生偏移。在浅海的 环境中,多途现象远比深海严重的多。当源端的发射 角比较大时,各条声线的频偏随着入射角度的不同就 会产生较大的差异。接收信号发生的多普勒频移是多 条路径的叠加,所以,最终会在频域产生频谱的展宽, 它是反映信道频率色散的重要参量。 2) 相关时间 通信信道的时间变化率通常用相关 时间 c t来表示。如果两个观察点的时间间隔远小于 c t, 那么两个观察时刻的信道冲击响应可以看成是相似 的,即有 1212 ,,, c H twHtwt tt 否则,两个信道的冲击响应是不同的。相关时间 c t与最大多普勒扩展 d f 的关系为 1 cd tf 。 3. 仿真软件平台介绍 3.1. 软件平台架构 本文根据高斯射线束跟踪算法,搭建了水声信道 仿真实验平台,通过实验仿真获得水下声信道的物理 仿真结果。仿真平台软件的模块架构框图如图 1所示。 软件模块分成静态响应和动态响应两部分。静态响应 部分为标准的 BELLHOP软件结构[4],输入参数为: 垂直声速梯度分布、海底地形边界条件、海底底质反 射系数。动态响应部分通过引入收发端的相对运动, 利用各时刻不同位移处具有不同特征的静信道,来模 拟接收端信道的动态响应变化。 通过高斯束射线跟踪算法,模型将输入转化为: 声线轨迹、声场分布、传播损失、信道冲击响应,接 收信道频域谱等结果输出。 该仿真平台对浅海水声信道的建模与地面无线 通信的仿真存在一定的差别。通常的无线通信信道的 仿真是一种数学仿真,是建立在大量测试结果之上的 数学模型化。而水下声学仿真是建立在波动方程基础 之上,根据物理规律进行的模型仿真,因而物理含义 更加清晰,易于在物理概念的基础上把握信道的基本 特征。 3.2. 仿真数据来源 软件使用的输入数据参数包括声速梯度分布、海 底地形数据以及底质数据。对于给定的仿真模型,数 据库的精度越高,仿真的效果就越接近真实的水文环 境。然而,对于高精度的数据库,由于涉及安全等因 素一般不对外公开。本文所采用的数据均是来自各开 源组织提供的水文数据库。由于允许自由下载,方便 了所有研究人员的使用与比较,并且同样能够提供比 较理想的精度。 1) 声速数据库 平台声速数据取自 World Ocean Atlas 2009 (WOA09)数据库作为模型的声速输入。WOA09 数据 库是 2009 年世界海洋信息数据库,包含年度、季度、 月度的声速、盐度、温度等信息,精度最高达到 0.5˚, 可对仿真环境进行准确的设定[8,9]。声速数据库参数如 表1所示。 声速梯度分布 海底地形 海底反射系数 收发端相对 运动参数 模型输入 模型输入 静态仿真 动态仿真 模型输入 声线轨迹 声场分布 传播损失 冲击响应 信号频谱 Figure 1. The simulation model structure of the shallow water channel 图1. 浅海水声信道仿真模型结构  浅海水声信道动态响应建模与仿真研究 Copyright © 2013 Hanspub 4 Table 1. World Ocean Atlas 2009 database 表1. World Ocean Atlas 2009数据库参数 数据库名称 纬度 经度 深度 时间范围 World Ocean Atlas 2009 −89˚~+89˚ −179.5˚~+179.5˚ 33 个标 准深度 (0~5000 m) 2009 年各季 度、各月 平均值 2) 海底数据来源 软件使用 NGDC (National Geophysical Data Center) 的DECK41 数据库[8]和Google Elevation API 来获取的海底信息。Google 数据库提供了地球表面所 有位置的海拔数据,包含海底深处位置,传回负值信 息。通过使用实测数据库,减少了理想化地形对仿真 精度的影响,提高了模型的可靠性。此外,海底介质 会在一定程度上影响声波传播,本文不研究介质对信 道的影响,因此介质数据为数据库中的常量值。 4. 给定条件下静态信道仿真验证 1) 声速梯度分布 图2给出了仿真海域四季的声速分布,春季和夏 季的声速随深度变化规律主要受到水温随深度降低 的影响呈现负梯度,秋季和冬季的声速由于等温层的 影响随压强增大而增大。由于声速对声信号传播的影 响主要是由它的相对变化趋势引起的,而不是它的绝 对值。所以,这里把春季和夏季归为一组,秋季和冬 季归为一组,只针对夏季和冬季进行仿真。 3) 仿真海域地形 根据 DECK41 数据库,测试点海底介质属于粗砂 类,该类介质典型参数为:密度2 g/cm3,声速 1900 m/s,传播损失系数 0.8 dB/λ(每个波长损失0.8 dB)。 仿真海域的地形数据如图 3所示。 由于声速剖面的不均匀性,声信号在海洋中的传 播是弯曲的。加上浅海环境本身的垂直距离较短,使 得多途干扰远比深海以及地面无线通信要严重的多。 本节基于高斯射线束跟踪法,采用实测声速和地形数 据库,对东海海域(东经 124˚,北 纬31˚)的站点进行了 信道冲击响应函数的仿真研究。仿真中声源和接收点 的深度分别设置为 35 m;通信距离为 2 km;发射掠 射角范围为−89˚~+89˚。水深为站点所在处实际水声 (平均深度约为45 m);载波频率为 4.8 kHz。仿真结果 如图 4所示。 由于海平面与海床的距离很近,声线会在界面之 146014801500152015401560 0 20 40 声速 (m / s) 深度 (m ) 146014801500152015401560 0 20 40 声速 (m/s) 深度 (m ) 146014801500152015401560 0 20 40 声速 (m / s) 深度 (m ) 146014801500152015401560 0 20 40 声速 (m/s) 深度 (m ) 秋季 冬季 夏季春季 Figure 2. Ocean sound speed distribution of the simulation area 图2. 目标海域四季垂直声速梯度分布 海洋 海底 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 0 −5 −10 −20 −25 −30 −35 −40 −45 −50 Figure 3. bathymetry of the simulation area 图3. 仿真海域的海底地形 1.3 1.4 1.51.61.71.8 0 0.5 1 1.5 x 10 -3 Tim e (s) Amplitude 夏季冲击响应函数 1.3 1.4 1.51.61.71.8 0 0.5 1x 10 -3 Tim e (s) Amplitude 冬季冲击响应函数 Figure 4. Impulse response 图4. 冲击响应函数 间发生多次反射。浅海水声信道的多途干涉远比地面 通信恶劣。声线到达的时延差在几十至几百毫秒范围 内,通信速率较高时会产生严重的码间串扰。 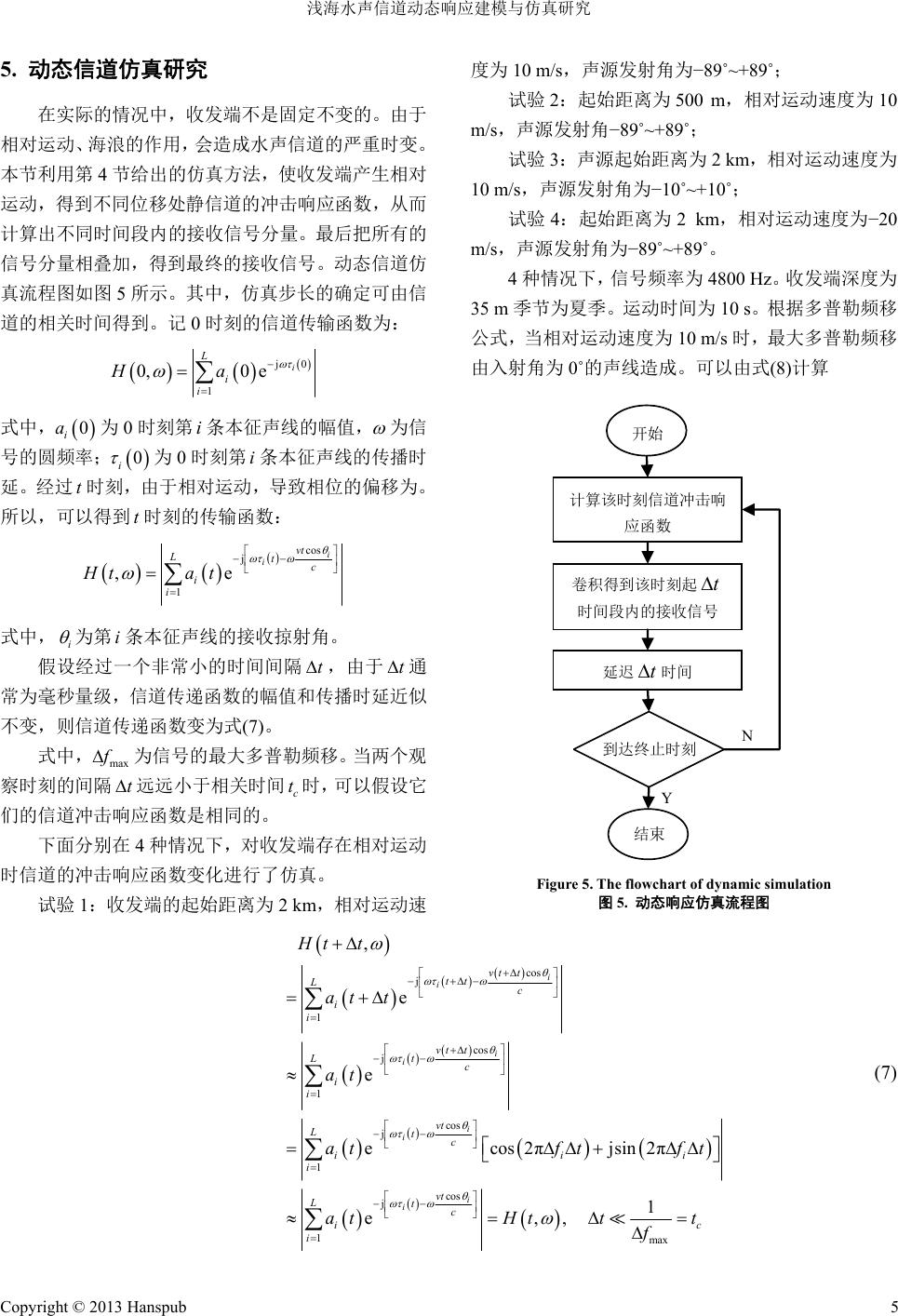 浅海水声信道动态响应建模与仿真研究 Copyright © 2013 Hanspub 5 5. 动态信道仿真研究 在实际的情况中,收发端不是固定不变的。由于 相对运动、海浪的作用,会造成水声信道的严重时变。 本节利用第 4节给出的仿真方法,使收发端产生相对 运动,得到不同位移处静信道的冲击响应函数,从而 计算出不同时间段内的接收信号分量。最后把所有的 信号分量相叠加,得到最终的接收信号。动态信道仿 真流程图如图 5所示。其中,仿真步长的确定可由信 道的相关时间得到。记 0时刻的信道传输函数为: j0 1 0,0 ei L i i Ha 式中, 0 i a为0时刻第 i条本征声线的幅值, 为信 号的圆频率; 0 i 为0时刻第 i条本征声线的传播时 延。经过 t时刻,由于相对运动,导致相位的偏移为。 所以,可以得到 t时刻的传输函数: cos j 1 ,e i i vt Ltc i i Hta t 式中, i 为第 i条本征声线的接收掠射角。 假设经过一个非常小的时间间隔 t,由于t 通 常为毫秒量级,信道传递函数的幅值和传播时延近似 不变,则信道传递函数变为式(7)。 式中, max f为信号的最大多普勒频移。当两个观 察时刻的间隔 t远远小于相关时间 c t时,可以假设它 们的信道冲击响应函数是相同的。 下面分别在 4种情况下,对收发端存在相对运动 时信道的冲击响应函数变化进行了仿真。 试验 1:收发端的起始距离为 2 km,相对运动速 度为 10 m/s,声源发射角为−89˚~+89˚; 试验 2:起始距离为 500 m,相对运动速度为 10 m/s,声源发射角−89˚~+89˚; 试验 3:声源起始距离为2 km,相对运动速度为 10 m/s,声源发射角为−10˚~+10˚; 试验 4:起始距离为 2 km,相对运动速度为−20 m/s,声源发射角为−89˚~+89˚。 4种情况下,信号频率为 4800 Hz。收发端深度为 35 m 季节为夏季。运动时间为 10 s。根据多普勒频移 公式,当相对运动速度为 10 m/s 时,最大多普勒频移 由入射角为 0˚的声线造成。可以由式(8)计算 Y 计算 该时 刻信 道冲 击响 应函数 卷积 得到 该时 刻起 t 时间段内的接收信号 延迟 t 时间 到达 终止 时刻 开始 结束 N Figure 5. The flowchart of dynamic simulation 图5. 动态响应仿真流程图 cos j 1 cos j 1 cos j 1 cos j 1max , e e ecos2πjsin2π 1 e,, i i i i i i i i vt t tt Lc i i vt t t Lc i i vt Ltc iii i vt Ltc i c i Ht t at t at atf tf t atHt tt f (7) 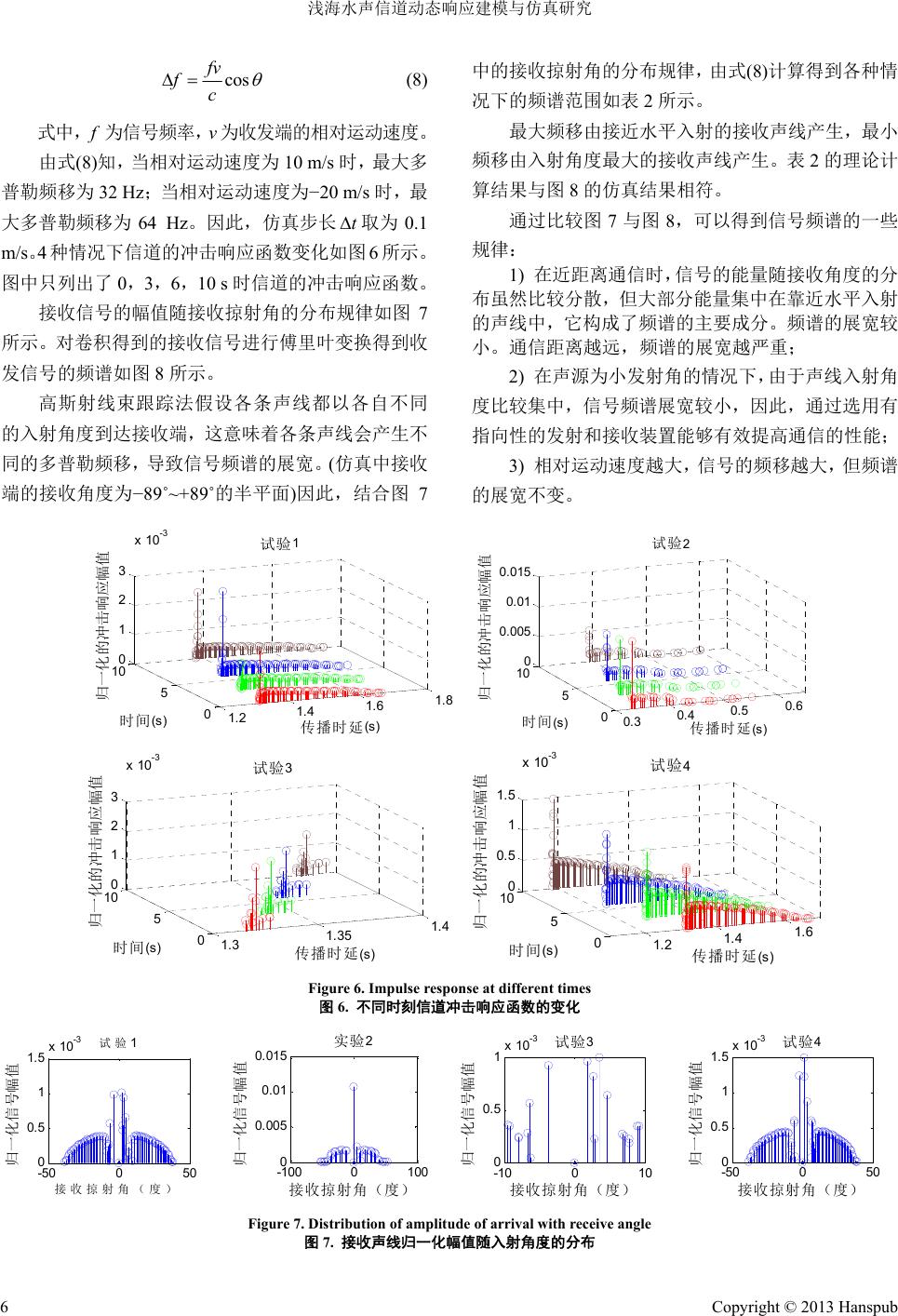 浅海水声信道动态响应建模与仿真研究 Copyright © 2013 Hanspub 6 cos fv fc (8) 式中, f 为信号频率, v为收发端的相对运动速度。 由式(8)知,当相对运动速度为10 m/s 时,最大多 普勒频移为 32 Hz;当相对运动速度为−20 m/s 时,最 大多普勒频移为64 Hz。因此,仿真步长 t取为 0.1 m/s。4种情况下信道的冲击响应函数变化如图 6所示。 图中只列出了0,3,6,10 s 时信道的冲击响应函数。 接收信号的幅值随接收掠射角的分布规律如图7 所示。对卷积得到的接收信号进行傅里叶变换得到收 发信号的频谱如图 8所示。 高斯射线束跟踪法假设各条声线都以各自不同 的入射角度到达接收端,这意味着各条声线会产生不 同的多普勒频移,导致信号频谱的展宽。 (仿真中接收 端的接收角度为−89˚~+89˚的半平面)因此,结合图 7 中的接收掠射角的分布规律,由式(8)计算得到各种情 况下的频谱范围如表 2所示。 最大频移由接近水平入射的接收声线产生,最小 频移由入射角度最大的接收声线产生。表 2的理论计 算结果与图 8的仿真结果相符。 通过比较图 7与图 8,可以得到信号频谱的一些 规律: 1) 在近距离通信时,信号的能量随接收角度的分 布虽然比较分散,但大部分能量集中在靠近水平入射 的声线中,它构成了频谱的主要成分。频谱的展宽较 小。通信距离越远,频谱的展宽越严重; 2) 在声源为小发射角的情况下,由于声线入射角 度比较集中,信号频谱展宽较小,因此,通过选用有 指向性的发射和接收装置能够有效提高通信的性能; 3) 相对运动速度越大,信号的频移越大,但频谱 的展宽不变。 1.2 1.4 1.6 1.8 0 5 10 0 1 2 3 x 10 -3 传播时延 (s) 试验 1 时间 (s) 归一化的冲击响应幅值 0.3 0.4 0.5 0.6 0 5 10 0 0.005 0.01 0.015 传播时延 (s) 试验 2 时间 (s) 归一化的冲击响应幅值 1.3 1.35 1.4 0 5 10 0 1 2 3 x 10 -3 传播时延 (s) 试验 3 时间 (s) 归一化的冲击响应幅值 1.2 1.4 1.6 0 5 10 0 0.5 1 1.5 x 10 -3 传播时延 (s ) 试验 4 时间 (s ) 归一化的冲击响应幅值 Figure 6. Impulse response at different times 图6. 不同时刻信道冲击响应函数的变化 -50 050 0 0.5 1 1.5 x 10 -3 试验 1 接收掠射角(度) 归一化信号幅值 -100 0100 0 0.005 0. 01 0.015 实验 2 接收掠射角(度) 归一化信号幅值 -10 010 0 0.5 1x 10 -3 试验 3 接收掠射角(度) 归一化信号幅值 -50 050 0 0.5 1 1.5 x 10 -3 试验 4 接收掠射角(度) 归一化信号幅值 Figure 7. Distribution of amplitude of arrival with receive angle 图7. 接收声线归一化幅值随入射角度的分布 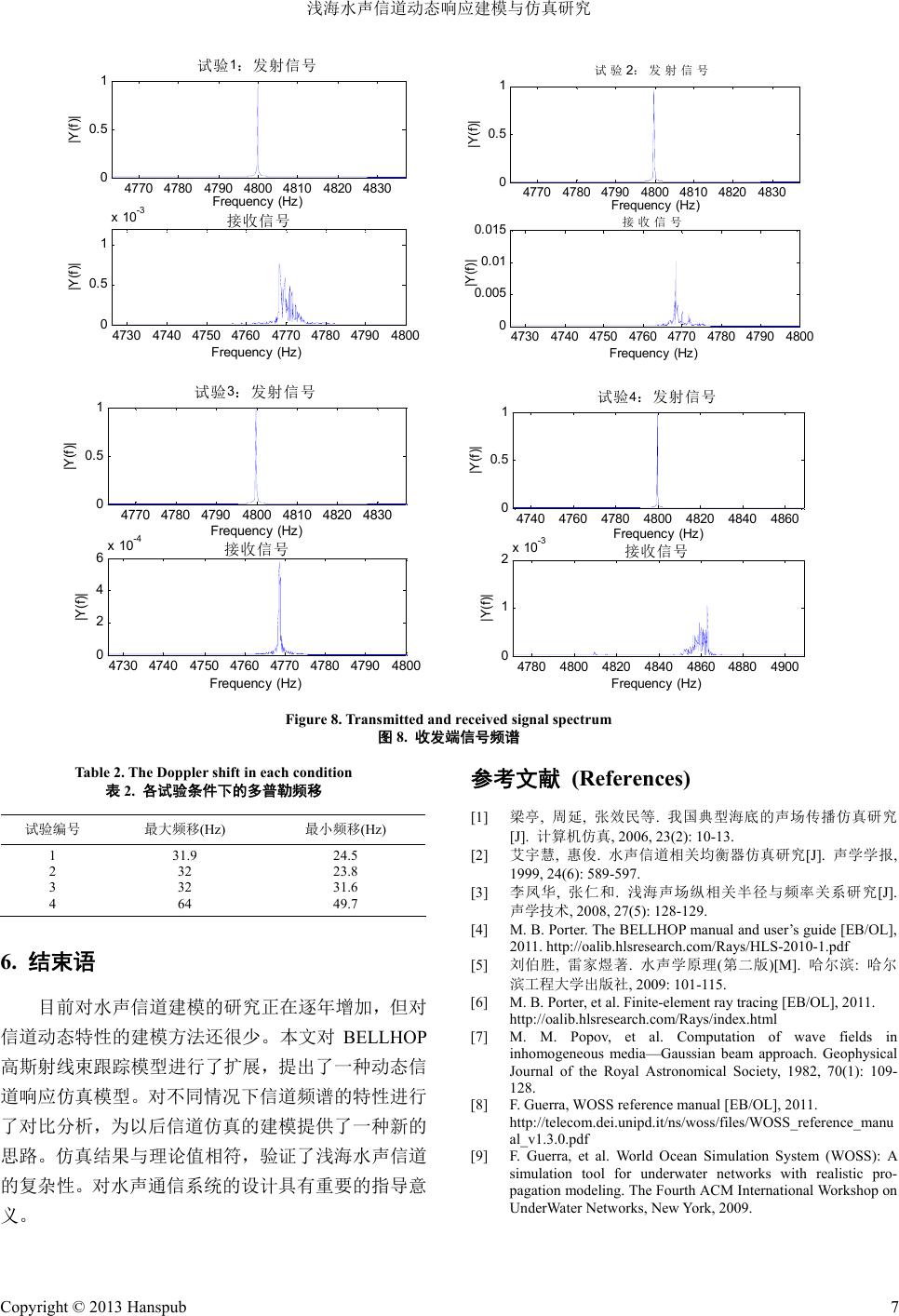 浅海水声信道动态响应建模与仿真研究 Copyright © 2013 Hanspub 7 4770 47804790 4800 48104820 4830 0 0.5 1 试验:发射信号 1 Frequency (Hz) |Y (f) | 47304740 4750 47604770 4780 47904800 0 0.5 1 x 10 -3 接收信号 Frequency (Hz) |Y (f)| 47704780479048004810 48204830 0 0.5 1 试验 :发射信号 2 Frequency (Hz) |Y(f)| 4730 47404750 47604770 47804790 4800 0 0.005 0.01 0.015 接收信号 Frequency (Hz ) |Y(f)| 4770 4780 4790 4800 4810 48204830 0 0.5 1 试验 :发射信号 3 Freq uency (Hz) |Y(f)| 4730 4740 47504760 4770 4780 4790 4800 0 2 4 6x 10 -4 接收信号 Frequenc y (Hz ) |Y(f)| 4740 4760 4780 4800 4820 48404860 0 0.5 1 试验:发射信号 4 Frequency (Hz ) |Y (f)| 4780 4800 4820 4840 48604880 4900 0 1 2x 10 -3 接收信号 Frequency (Hz) |Y (f)| Figure 8. Transmitted and received signal spectrum 图8. 收发端信号频谱 Table 2. The Doppler shift in each condition 表2. 各试验条件下的多普勒频移 试验编号 最大频移(Hz) 最小频移(Hz) 1 2 3 4 31.9 32 32 64 24.5 23.8 31.6 49.7 6. 结束语 目前对水声信道建模的研究正在逐年增加,但对 信道动态特性的建模方法还很少。本文对 BELLHOP 高斯射线束跟踪模型进行了扩展,提出了一种动态信 道响应仿真模型。对不同情况下信道频谱的特性进行 了对比分析,为以后信道仿真的建模提供了一种新的 思路。仿真结果与理论值相符,验证了浅海水声信道 的复杂性。对水声通信系统的设计具有重要的指导意 义。 参考文献 (References) [1] 梁亭, 周延, 张效民等 . 我国典型海底的声场传播仿真研究 [J]. 计算机仿真, 2006, 23(2): 10-13. [2] 艾宇慧, 惠俊. 水声信道相关均衡器仿真研究[J]. 声学学报, 1999, 24(6): 589-597. [3] 李凤华, 张仁和. 浅海声场纵相关半径与频率关系研究[J]. 声学技术, 2008, 27(5): 128-129. [4] M. B. Porter. The BELLHOP manual and user’s guide [EB/OL], 2011. http://oalib.hlsresearch.com/Rays/HLS-2010-1.pdf [5] 刘伯胜, 雷家煜著. 水声学原理(第二版)[M]. 哈尔滨: 哈尔 滨工程大学出版社, 2009: 101-115. [6] M. B. Porter, et al. Finite-element ray tracing [EB/OL], 2011. http://oalib.hlsresearch.com/Rays/index.html [7] M. M. Popov, et al. Computation of wave fields in inhomogeneous media—Gaussian beam approach. Geophysical Journal of the Royal Astronomical Society, 1982, 70(1): 109- 128. [8] F. Guerra, WOSS reference manual [EB/OL], 2011. http://telecom.dei.unipd.it/ns/woss/files/WOSS_reference_manu al_v1.3.0.pdf [9] F. Guerra, et al. World Ocean Simulation System (WOSS): A simulation tool for underwater networks with realistic pro- pagation modeling. The Fourth ACM International Workshop on UnderWater Networks, New York, 2009. |