 Mechanical Engineering and Technology 机械工程与技术, 2013, 2, 1-10 http://dx.doi.org/10.12677/met.2013.21001 Published Online March 2013 (http://www.hanspub.org/journal/met.html) Advances and Existing Issues in Contact Model of Mechanical Joint Surface* Hongliang Tian, Dalin Zhu, Hongling Qin College of Mechanical and Material Engineering, China Three Gorges University, Yichang Email: thl19732003@yahoo.com.cn Received: Oct. 18th, 2012; revised: Nov. 20th, 2012; accepted: Dec. 4th, 2012 Abstract: The basic concept about mechanical joint surface was introduced. More than 90% of damping in a machine tool comes from mechanical joint surface. There are many factors that affect the characteristics of mechanical joint sur- face, most of which are nonlinear. Some contact models in common use, for example statistical model, fractal model, finite element model and experimental model were relatively generally reviewed. Their advantage, existing issue and application range were discussed in detail. At last, some most basic problems unsatisfactorily solved were pointed out. Keywords: Joint Surface; Contact Model; Contact Stiffness; Contact Damping 机械结合面接触模型的研究进展及存在的问题* 田红亮,朱大林,秦红玲 三峡大学机械与材料学院,宜昌 Email: thl19732003@yahoo.com.cn 收稿日期:2012 年10 月18日;修回日期:2012 年11 月20 日;录用日期:2012年12 月4日 摘 要:介绍了机械结合面的基本概念。一台机床 90%以上的阻尼来自机械结合面。影响机械结合面特性的因 素众多,且多为非线性性质。对机械结合面的几种常用接触模型如统计模型、分形模型、有限元模型、试验模 型进行了比较全面的回顾和评述,详细地论述了相应模型的优点、存在的问题和应用范围。最后指出了还没有 妥善地解决好机械结合面一系列最基本的问题。 关键词:结合面;接触模型;接触刚度;接触阻尼 1. 引言 机床甚至各种机械为满足各种功能,一般都不是 一个连续的整体,而是由各种零件按照一定的具体要 求组合起来的。称零件、组件、部件之间相互接触的 表面为机械结合面,简称结合面或接触面。一台机床 60%~80%的刚度、90%以上的阻尼、55%的动柔度与 85%~90%的静变形量都来自结合面,所以要想建立一 个精确的结构动力学模型,就必须准确了解结合面动 态特性。然而进行结构结合面动态特性的研究一直是 动力学研究领域的难点之一,目前仍没有一套比较成 熟的理论与方法,大多数情况下仍然是靠经验估计。 因此如何准确辨识结构结合面参数便成为结构动态 设计中的一项关键技术。本文对机械结合面的几种常 用接触模型给予评述,详细地论述了相应模型的优 点、存在的问题和应用范围。 2. 机械结合面统计模型的研究进展 当两个固体表面接触时,由于表面粗糙,实际接 触只发生在表观面积的极小部分上。实际表面上粗糙 峰顶的形状通常是椭圆体,由于椭圆体的接触区尺寸 *基金项目:国家自然科学基金(51275273)和三峡大学博士科研启动 基金(KJ2012B013)资助。 Copyright © 2013 Hanspub 1  机械结合面接触模型的研究进展及存在的问题 远小于本身的曲率半径,因而单个粗糙峰可以近似为 球体,两个平面的接触可近似为一系列高低不齐的球 体相接触[1]。1966 年Greenwood和Williamson 提出了 名义上平坦平面的接触模型[2],简称 GW模型。典型 粗糙两表面的随机分布接触点的接触状态可分为:塑 性接触类、弹性接触类和未参与接触类,如图 1所示 [3]。单峰与刚性粗糙平面的接触状态如图2所示,轮 廓曲线在平均高度线上下两侧的面积相等。 参与接触的粗糙峰点数、总电导(单位为西门子 S)、实际接触面积、总法向载荷、塑性指数分别为 a0 mAFd (1) 11212 a12 2i GARFd (2) rr a1 1 π m ii i AA ARFd (3) 12 32 na 32 4 3i FAERFd (4) i ER H (5) 式中, 是峰点密度,单位为点数/m2;a A ab是表 观面积; 22 12 是综合粗糙度方差。 临界接 触面积, 是常数 为 参与弹性接 触的粗糙峰 点数 n为粗糙 表面的 峰点数 为参与塑 塑性接 触类 弹性接 触类 未参与 接触类 任一单峰接 触面积 ,是 计算参数 特征参数和 计算参数 r1 A r2 A r3 A p rm A p m 性接触的粗 糙峰点数 p r( 1)m A p r( 2)m A p r( 3)m A rm A ep mmm r( 1)m A r( 2)m A r( 3)m A rn A rmaxi A rmin 0i A ri A c A Figure 1. Three kinds of contact states and characteristic parame- ters 图1. 3类接触状态及特征参数 d d F dsd ss, s s 是单峰高度的标准概率分布密度[7], 单位为一, z 是单峰高度的概率分布密度,单位为 m−1。 1987 年Chang 等提出了弹塑性接触模型[8],简 称 CEB 模型。CEB 模型考虑了粘着力,扩充了 GW模 型。CEB 模型如图 3所示。 (a) z w d h s y 1 R i R n R 固定刚性粗糙平面1 弹性粗糙表面2 单峰半 球体1单峰半 球体i 单峰半 球体n 弹性粗糙表面2平均高度线 单峰平均高度线 n1 Fni F (b) Figure 2. GW contact model[4-6]: (a) Magnified asperity; (b) Con- tact of an asperity with a rigid rough surface 图2. G W接触模型[4-6]:(a) 放大后的 1个单峰;(b) 单峰与刚性粗 糙平面的接触 a b i R c wp ww l 单峰球体 固定刚性 粗糙平面 i ai l Figure 3. CEB model of volume conservation in plastic deforma- tion 图3. 塑性变形时体积守恒 CEB 模型 Copyright © 2013 Hanspub 2  机械结合面接触模型的研究进展及存在的问题 接触变形量为临界变形量时球台的体积[9]为 22 1c 1c1 ,, π36 ii VablKwRwRKw wKw 6 (6) 式中, 。 1i lKw 任意塑性变形时球台的体积为 2 1c 1 2 1c 13 ,, π6 64 a Vabl KwwwRKww Kw w w c (7) 令式(6)与式(7)相等,可得塑性变形时单峰的实际 接触面积为 1 2 1c cc 3 3 11 c1 c cc c π4π221 131 π π22π K wR aRwKww wwww K KwwwRKww Rww w ww w l RRw 当 很大时当时 当很大时 (8) GW 模型认为纯弹性变形时单峰的实际接触面积 为,纯塑性变形时单峰的实际接触面积[10]趋近 ,e的标注见图 4(c)。可见 CEB 模型的式 (8)至少在临界变形和完全塑性变形这 2种极端情况下 是成立的。 πRw 22ππeRw 由式(8)可得实际接触面积、总法向载荷分别为 p c p c rrra 11 ac πd π2d m mdw ii d im i dw A AA ARzdz ARz dwzz z (9) c c 32 12 na ac 4d 3 π2d dw d dw FAER zdzz A RKHz dwzz (10) 式中, 0.2 HK 是较软材料的硬度,单位为 Pa。 Kogut 和Etsion[11]基于GW 模型改进了弹塑性接 触、粘着力和摩擦模型,简称 KE 模型。Jackson 和 Green[12]提出了一种与KE 模型类似的弹塑性接触模 型,该模型用材料的屈服强度代替材料的硬度,因为 材料的硬度会随着不断改变的接触几何条件和材料 特性而变化。 3. 机械结合面分形模型的研究进展 1991 年Majumdar 和Bhushan 利用 Weierstrass- Mandelbrot分形函数[13,14] 1 1 2 cos 2π;12; 1 n D Dn nn x zx GD (11) 和单峰实际接触面积大于ri A 的参与接触粗糙峰点数 [15-17] 2 rr rmaxr D jii i NA AAA (12) 首次提出了具有尺度独立性的粗糙表面弹塑性 接触分形模型[18],简称 MB 模型。单个粗糙峰不受外 单峰球体 刚性粗 糙平面 i R E (a) 单峰球体 刚性粗 糙平面 ni e ni F E i R i r (b) 单峰球体 刚性粗 糙平面 ni e ti 1 2 E i R ni F ti F i r (c) Figure 4. Hertzian elastic conta s in g l e a sp e r ity: (a) Contact of 图 受法向载荷单峰的接 切向载荷单峰的接触[19-28] ct of asperity unaffected by external load; (b) Contact of asperity af- fected by normal load; (c) Contact of asperity affected by normal and tangential load[19~28] 4. 单个粗糙峰 Hertzian 弹性接触:(a) 不受外载荷单峰的接触;(b) 触;(c) 受法向载荷和 Copyright © 2013 Hanspub 3  机械结合面接触模型的研究进展及存在的问题 Copyright © 2013 Hanspub 4 [29,30] 量; ttii F 是作用在第 i个接触粗糙峰上的切向载 荷; ti 是第 i个接触粗糙峰的切向变形量; 是泊松 比; s 是静摩擦因数。 载荷时,单峰与刚性粗糙平面的接触状态如图 4(a)所 示;当受法向载荷时,单峰与刚性粗糙平面的接触状 态如图 4(b)所示;当再受切向载荷时,单峰与刚性粗 糙平面的接触状态如图 4(c)所示,此时单峰的形状由 图示的实线位置 1变为虚线位置 2。 Hertz 解 为 第i个接触粗糙峰与刚性粗糙平面接触的法向接 触刚度、切向接触刚度[32,33]分别为 13 2 22 2 12 nn 12 n 1 1 16 iii i F RE E (13) 1 9 nn 12 r n22 n12 21 d2 dπ11 ii i ii FEEA kEE (16) 13 22 12 nn 12 11 3 4 ii iii rR F EE n (14) 13 rt 12 t22 sn 12 21 41 π12 11 i i AF EE kF EE (17) 22 12 t n1 23 tt sn snn 31 211 8 11 iii ii iii rE F FF 2 E 式中, ri A 是第 i个参与接触粗糙峰的实际接触面积。 在闭区间 rr r ,d ii i A AA上参与接触粗糙峰点数 为 (15) 式中, 2 rmax r 22 r dd 2 D ii D i A D N A0A (18) 式中,D是粗糙表面的分形维数; rmax r 1 max ii im A A 。 nnii F 是作用在第 i个接触粗糙峰上的法向 [31] 载荷;ni 是第 i个接触粗糙峰的法向接触弹性变形 作用在整个粗糙表面上的法向载荷为 2 22 0.2 rmax1 4π D D i DKADE E 1 21.51.5 2rmax rmaxc c22 12 21 n12 34 34 1412 rmaxrmax 0.2r maxc22 c 12 21 11 .51.5 2 2332 11 π 3ln1.5 11 DDDD ii ii i G AAA ADD DD EE FEEG AA KAA D A EE 当或 当 (19) 式中,G是粗糙表面的分形粗糙度,单位为m。 为 整个粗糙表面的法向接触刚度、切向接触刚度分别 rmax 2 d i mA kk kN c p 12 12 2 1 2 rmaxrmaxc nn n22 11221 π1 11 DD D ii ii A im DE EAAA D EE (20) 13 12 12 2 12rmaxtrmax c t22 sn 12 21 41 π121 11 DD D ii DE EAFAA kFD EE (21) 式(19)~式(21)的无量纲形式分别为 22 2 22 *2*1 *2 rc r 1.5 ***1.5 nrc 34 34 *** *1 412 rrr c* c 4π2* 2332 211.51.5 3π*ln1.5 33 3 DD D DD DD DDD KAA GA DDD D FAA D D AAA KAGD A 2 D D 当或 当 (22)  机械结合面接触模型的研究进展及存在的问题 222 12 12 2 nrr 22 2 π1 DDDD D DD D kAA D D c A (23) 13 222 12 12 2t tr r sn 82 2 1 π21 DDDD D DD FD kAA FD D c A 式中, (24) 22 *n1 2 n a1 2 11F FAE E 22 *n1 n 12 a 11k kEE A 2 22 *t12 t 12 a 2(1 )11 k kEE A 22 12 0.2 12 11 EE 盛选禹等[34-36]根据 MB 模型采用 Hamilton 公式 [37-39]使用 Tresca 屈服六边形条件[40]对静摩擦因数进行 了预测。当粗糙表面承受法向载荷和切向载荷时,静 摩擦因数为 s 22 22 *** rrc 1.52 2 * *1.5 rc /2 22 */2 *1 rc 8 π63 2 2 4π2* 3(32 ) DD D DD D D D DD D AAA D AA K DD DD AA G DD /2 2 1*2 r 32 2 12* 3π63 32 2 DDD DDGA D D DD */2 r 1.5 * *1.5 rc 22 22 **/2* rrc 34 ** 12 rr * c 34 ** *141/ 2 rr c 2 11.51.52 8 π(63 )2 8(2 1)*ln3 33 π(63 ) π* 33 D DD DD D A DAA D DD D AAA D AA GK A AA AG 当或 3/4 * r * c ln 1.5 3 AD A 当 (25) MB 模型根据分形函数式(11)推导单峰顶曲率半径 2 r 21 πD G D i i A R (26) 不是常数,但 GW 模型假定所有单峰顶曲率半径都等 于同一个常数,因此 MB 模型更符合实 的分形维数应满足 际。式(11)中 12D ,事实上式 Weierstrass 提出如下函数[41] 01ab;1ab(27) 的特例。陈辉等[42]采用式(11)模拟 的单粗糙表 面和 (11)是1872 年 0 cos 2π kk k Wx abx ; 2.5D 12.1D 、22.9D 的双分 以他们得到 Weierstrass-Mandelbrot 分形函数能很好地实现对分形 表面模拟的结论是很可疑的[43]。在塑性载荷时 MB 模 型忽略了各粗糙单峰间的相互作用力,Pullen 和 Williamson[44]考虑了这种相互作用力。 4. 机械结合面有限元模型的研究进展 多项式运算简便,随着项数的增多,可以逼近任 何一段光滑的函数曲线,在有限单元法中单元上任意 一点的位移函数一般采用多项式作为近似函数[45]。 1994 年张杰和童忠钫[46]提出了理想结合面和矩形结 合面元[47-51]的建模方法,矩形结合面元e如图 5所示, e在Oxy 平面内,1234 为上子结构的下表面e1,P点 为矩形 1234 的中心,5678为下子结构的上表面 e2。 形表面,所 2a 12 34 5 2bh P7 8 6 结合面元e2 O y z x 1 u 1 v 1 w 2 v u 2 2 w 3 u3 v 3 w 4 v 4 u 4 w 5 u 5 v 5 w 7 u w7 v 7 6 u6 v 6 w 8结合面元e1 u 8 v 8 w Figure 5. 4-node rectangle joint element e 图5. 4结点矩形结合面元 e Copyright © 2013 Hanspub 5  机械结合面接触模型的研究进展及存在的问题 结点 i的直角坐标、位移坐标、速度坐标分别为 ,, iii x yz、 ,, ii i uvw 、 ,uv 。e上的位移函数、 速度函数分别为 式中, , ii i w e 616 24 fNδ;e 616 24 fNδ (28) T e1 e1e1e2e2e2 uvwuvwf 6 11 11 11 PP P xx yyyy I e 1 1 155522266 uvwuvwuvwuvδ σ 666 11 11 11 4444 PPP PP xxxx yyxx yy ab abab ab N III 弹性应力、阻尼应力分别为 T 633 377744488 8 wuvwuvwuvwuvw S f Ddf (29) 为,虚位移函数为 。e在结点力 作用下, 由虚 当e发生了微小的虚位移时,相应的结点虚位移 e52] e *δ[*fF 位移原理得 TTT ee **dd*ddδFfSf fdf DD x yxy (30) 式中, ,, pppp Dxyxaxxaybyyb 是闭区域。 将上式展开得 e (31) ee FKδCδ 42 2 242 242 9 22 4 ab S SS S S SSS K S SSS S SSS ; 42 2d 242 ddd dddd d 242 9 224 ab Cd ddd dd d x xyxzxxxyxzx y xxxzx yxxxzx z xzxzz zxzxzz xxyx zxxxyx zx yx xx zxyx xx zx zxzz zxzxzzzx s ss sss s ss sss s ss sss sssss s ssssss ssss S ss x xyxzx xxyxzx y xxxzx yxxxzx z xzxzz zxzxz xx yxzxxx yxzx yx xx zxyx xx zx zx zx zzzx zx zz ddd d ddd ddd dddddd dddddd dddddd dddddd d z 2004 年王世军等[53]提出了 6结点等参数接触单 元,认为结合面上任意一点的位移等于结合面元e1、 e2 上相应 度矩阵。 2007 年谢波 认 结合面结点数 等于 面元 e1、 位移之差 轨的结合面单元如图 6所示。 作用力或力矩方程 dd 点的位移函数之差,推导了单元刚 [54] 为结合面由结点组成, 结合面元上的结点数,结合面结点位移等于结合 e2 上相应的结点 ,提出了柔度影响 系数法,滑块和导 为 42 4 11 mnmnij ijij ij kuu f ;; 1, 2,, 8m,nxy 轴 (32) 式中,是刚度影响系数,是当只在第i和第i + 结点的 j方向产生一相对单位位移时,在 m结点的n 方向需要施加的力的大小。 上式前 8个方程的矩阵形式为 mnij k4 e F KU (33) 式中, T e 1122 3344xyxyxyxy ffffffff F 1515262637 T 374848 x xy y x x yyx yyxxyy uuuu uu uuuu uuuuu u x U 位移方程为 41 23 8 h P 5 6 7 结合面元e2 Ox z y 4x u 4 y u 1x u 1 y u 2x u 2 y u 3x u 3 y u 8x u 8 y u 6x u 6 y u 5x u 5 y u 7x u 7 y u 结合面元e1 沿固定导轨的z方 向自由滑动的滑块 固定导轨 Figure 6. Joint interface comof fixed guide way and slide posed 图6. 固定导轨和滑块的结合面 Copyright © 2013 Hanspub 6  机械结合面接触模型的研究进展及存在的问题 42 11 ; 1,2,3,4; , mnmnij ij ij uudfm nxy 轴(34) e UDF (35) 式中,dmnij是柔度影响系数,是当只在 i结点的 j方 0.33720.05280.2473 0.09 0.0528 0.14080.0859 4mn 向作用一单位力时,在第 m和第 m + 4 结点的 n方向 引起的相对位移的大小。 结合面的柔度矩阵(单位为 m/N)、刚度矩阵(单位 为N/m)分别为 7 190.13010.09420.1363 0.0787 0.0053 0.04300.07630.03660.0121 0.0859 0.33720.05280.1363 0.07870.13010.0942 0.09190.0053 0.05280.14080.03660.01 10D 21 0.04300.0763 0.13010.04300.13630.0366 0.33720.05280.2473 0.0919 0.09420.0763 0.078710.0528 0.14080.08590.0053 0.13630.03660.1301300.2473 0.08590.33720.0528 0.07870.01210.03 0.0 9190.00530.0528 0.1408 0.2473 0.012 0.04 942 0.076 0.8791 (36) (37) 5. 机械结合面试验模型的研究进展 1993 年黄玉美等[55]定义结合面法向特性参数为 单位面积法向刚度、单位面积法向阻尼,获取结合面 特性参数的装置如图 7所示, 8 0.23360.57580.41000.10940.34470.0356 0.1669 0.34250.08020.1505 0.65620.18250.0951 0.57580.34250.85740.2752 0.04670.1286 0.10550.3673 0.410040.2240 0.10330.1702 10K 0.7104 0.10940.15050.04670.2 400.80700.16100.55580.4029 0.34470.65620.12860.10330.1610 1.35150.32610.0734 0.0356 0.1825 0.1055 0.10.55580.32610.78280.2088 0.16690.0951 0.3673 0.71040.4029 0.0 7340.2088 1.4214 0.2336 1.1805 0.08020.2752 1.247 2 702 sinfFt 是激 励力, 是法向静面压应力。 结合面的作用力方程为 n p j21 x txtxt (38) njnjjj sinCx tKx tfFt (39) 式(39)的解为 n j tF n j22 2 nn esin arctan K CC xt Ct K KC 上式等号右边的第 1项是瞬态振动,第 2项是稳 单位面积法向刚度 n n (40) 态振动,忽略第 1项,可得结合面法向特性参数为 jj n n j cos MPam F K kSXS (41) 单位面积法向阻尼 sin MPas m jj n n j F C cSXS (4 n K 2) 式中,、 分别是结合面的法向总刚度、总阻尼; S是结 触面积; n C 合面接 j X 是结合面位移 j x 的振幅; j 是 j f 与 j x 的相位差。 当结合面材料为铸铁对贴塑,磨削加工,表面粗 糙度为 Ra0.65 μm,干燥接触, 15~30 % j X , π2 j 时,特性参数为 40.430.660.67 n2.1710MPa m nj kpX (43) 40.47 0.950.35 nj 5.710MPas m n cpX (44) 1996 年黄玉美等[56]提出了如下结合面切向特性 参数 1 m 2 m 获取装置 加载装置 f 力传 感器 n p 1 m 2 m n K n C j f n1 K n1 C n2 K n2 C 2() x t 1() x t Figure 7. Apparatus acquiring joint interface’s characteristic pa- rameters 图7. 获取结合面特性参数的装置 Copyright © 2013 Hanspub 7 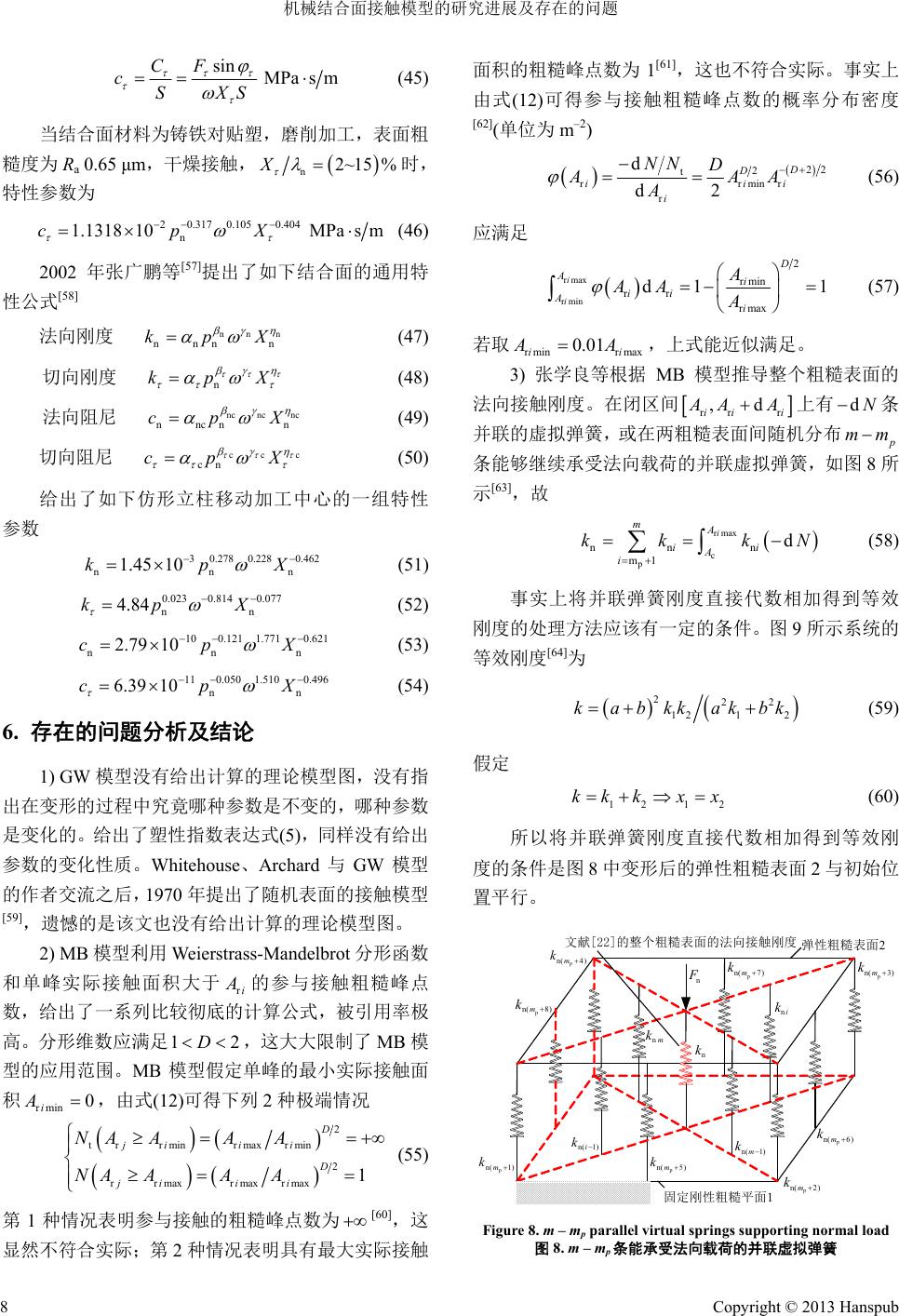 机械结合面接触模型的研究进展及存在的问题 sin MPas m CF cSXS (45) 当结合面材料为铸铁对贴塑,磨削加工,表面粗 糙度为 Ra 0.65 μm,干燥接触, n2~15 %X 时, 特性参数为 20.317 0.1050.404 n 1.131810MPas mcpX (46) 2002 年张广鹏等[57]提出了如下结合面的通用特 性公式[58] 法向刚度 nn n nnn n kpX (47) 切向刚度 n kpX (48) 法向阻尼 ncncnc nncnn cpX (49) 切向阻尼 cc c cn cpX (50) 给出了如下仿形立柱移动加工中心的一组特性 参数 (51) X (54) 6. 存在的问题分析及结论 1) GW 模型没有给出计算的理论模型 出在变形的过程中究竟哪种参数是不变的,哪 是变化的。给出了塑性指数表达式(5),同样没有给出 参数的变化性质。Whitehouse、Archard 与GW 模型 的作者交流之后, 1970 年提出了随机表面的接触模型 [59],遗憾的是该文也没有给出计算的理论模型图。 2) MB模型利用 Weierstrass-Mandelbrot 分形函 和单 30.278 0.2280.462 nnn 1.45 10kpX 0.0230.8140.077 nn 4.84kp X (52) 100.121 1.7710.621 nnn 2.79 10cpX (53) 11 0.050 n 1.510 0.496 n 6.39 10cp 图,没有指 种参数 数 峰实际接触面积大于 ri A 的参与接触粗糙峰点 数,给出了一系列比较彻底的计算公式,被引用率极 高。分形维数应满足这大大限制了MB 模 型的应用 定单峰的最小实际接 积 ,由式(1 2种极端情况 12, 列 D 2)可得下 范围。MB 模型假 触面 rmin 0 i A 2 t rrminrmax rmin r D ji ii A A NA (55) 为 合实 种情况表明具有最大实际接触 面积的粗糙峰点数为 1[61],这也不符合实际。事实上 由式(12)可得参与接触粗糙峰点数的概率分布密度 [62](单位为 m–2) 2 r maxr maxr max1 D ji ii AA A 第1种情况表明参与接触的粗糙峰点数 [60],这 显然不符际;第 2 NA A 22 2 t rrminr i (56) r d d2 D D ii i NN D AAA A 应满足 rmax rmin 2 rmin rr rmax d1 i i D Ai ii Ai A AA A 1 (57) 若取 rmin rmax 0.01 ii AA ,上式能近似满足。 3) 张学良等根据 MB 模型推导整个粗糙表面的 法向接触刚度。在闭区间 rr r ,d iii A AA上有dN 条 并联的虚拟弹簧,或在两粗糙表面间随机分布 p mm 条能够继续承受法向载荷的并联虚拟弹簧,如图 8所 示[63],故 N (58) 代数相加得到等 刚度的处的条件。图 9所示系统的 等效刚度[64]为 rmax nn n d i mA ii A kk k c p m1i 事实上将并联弹簧刚度直接 效 理方法应该有一定 222 1212 kabkkakbk (59) 假定 121 2 kkkxx (60) 所以将并联弹簧刚度直接代数相加得到等效刚 度的条件是图8中变形后的弹性粗糙表面 2与初始位 置平行。 p n( 1)m k p n( 2)m k p n( 3)m k p n( 4)m k p n( 5)m k p n( 6)m k p n( 7)m k n( 8)m kp ni nm k k n( 1)m k n( 1)i k n F 固定刚性粗糙平面 1 n k 弹性粗糙表面2 文献[22]的整个粗糙表面的法向接触刚度 Figure 8. m – mp parallel virtual springs supporting normal load 图8. m – mp条能承受法向载荷的并联虚拟弹簧 Copyright © 2013 Hanspub 8  机械结合面接触模型的研究进展及存在的问题 1 k2 k 1 x2 x F ab刚性平面 Figurem without algebraically 将刚度代数相加的并联 54]得到结点力和结合面结点位移的一组离散 点,应用最小二乘法,求出多项式的拟 例如结点力 e 9. Parallel syst adding stiffnesses 图9. 不能 系统 4) 处理数据的方法不同带来的误差也不同。按照 文献[ 合曲线[65,66], 1 x f 和结合面结点位移 37 x x uu的关系如 图10 所示。 加载、卸载的多项式拟合曲线方程分 2 别为 432 j0.01840.3066 0.9577 9.2049 0.0000 uff f f f 4 3 x0.01920.1350 0.2039uffff 12.3044 0.3000f 7 jj13 0.0010.0092μm0.09210m N xx ud (61) 7 xx13 0.0010.3123 μm3.12310mN xx ud (62) 而式(36)取 7 13 0.130110m N xx d (63) 图10 只取了5个离散点 如果随着离散点的增 加,相信误差会减小。 , 结力点 f/kN Figure 10. Relation between node force and joint interface’s node displacement 图10. 结点力和结合面结点位移的关系 5) 研究机械结合面,第一要建立机械结合面接触 模型,第二要给出识别参数的具体方法。截止目前 止,有关机械结合面一系列最基本的大小问题还没有 妥善地解决。大问题如两粗糙表面间的法向刚度矩 阵、法向阻尼矩阵能否地用 1个法向刚度、1个 粗糙表 、1个切向阻尼如式(45)、式(48)、式(50) 来简化;小问题如图7中的正弦激励力 f与结合面动 态力 fj具有怎样的关系,假定 f是正弦激励 是简谐激励力,式(41) 、式(42)还成立吗?也就是式 (41) (54)。要达到文献[55]提出的“结合 面特性参数应反映结合面的基本特性,具 类似零件的特性常数如弹性模量、损耗因 解析使用”这一目标,道路依然还很漫长。 参考文献 (References) eenwood, J. B. P. Williamson. Contact of nominally flat surfaces. Proceedings of the Royal Society of London, 1966, 295(1442): 300-319. [3] S. Ray, S. K. Roy Chowdhury. Prediction of flash temperature at the contact between sliding bodies with nanoscale surface rough- ness. ASME Journal of Tribology, 2007, 129(3): 467-480. [4] J. Jamari, M. B. de Rooij and D. J. Schipper. Plastic determinis- tic contact of rough surfaces. ASME Journal of Tribology, 2007, 129(4): 957-962. [5] C.-H. Lee, A. A. Polycarpou. Static friction experiments and veri- fication of an improved elastic-plastic model including rough- ness effects. ASME Journal of Tribology, 2007, 129(4): 754-760. [6] 濮良贵, 纪名刚. 机械设计(7 版)[M]. 北京: 高等教育出版社, 2003: 44. [7] 饶柱石, 夏松波, 汪光明. 粗糙平面接触刚度的研究[J]. 机 械强度, 1994, 16(2): 71-75. [8] W.-R. Chang, I. Etsion and D. B. Bogy. An elastic-plastic model for the contact of rough surfaces. ASME Journal of Tribology 1987, 109(2): 257-263. [ 200 [10] 赵亚溥 , 孙克豪. Tabor 数、粘着数与微尺 性接触理论[J]. 力学进展, 2000, 30(4): 529-537. [11] L. Kogut, I. Etsion. A static friction model for elastic-plastic contacting rough surfaces. ASME Journal of Tribology, 2004, 126(1): 34-40. [12] R. L. Jackson, I. Green. A finite element study of elasto-plastic hemispherical contact against a rigid flat. ASME Journal of Tri- bology, 2005, 127(2): 343-354. [13] M. V. Berry, Z. V. Lewis. On the Weierstrass-Mandelbrot fractal function. Proceedings of the Royal Society [14] A. Majund simulation 为 简单 法向阻尼如式(20)、式(41)、式(42)来简化,两 面间的切向刚度矩阵、切向阻尼矩阵能否简单地用 1 个切向刚度 力但 fj不 、式(42)、式(47)~式(50)都缺乏严格的数学证明, 甚至有些结果存在着自相矛盾的情况如式(48)与式 (52)、式(50)和式 有通用性, 子,能方便 地供设计 [1] 温诗铸, 黄平. 摩擦学原理(3 版)[M]. 北京: 清华大学出版社, 2008: 219. [2] J. A. Gr , 9] 数学手册编写组. 数学手册[M]. 北京: 高等教育出版社, 8: 82. , 王立森度粘着弹 of London, 1980, 370(1743): 459-484. mdar, C. L. Tien. Fractal characterization a Copyright © 2013 Hanspub 9  机械结合面接触模型的研究进展及存在的问题 Copyright © 2013 Hanspub 10 of rough surfaces. Wear, 1990, 136(2): 313-327. dar, Wear, 1990, 136(2): 313-327. , B. Bhushan. Fractal model of elastic-plastic con- , 1991, [19] J. A. Greenwood, J. H. Tripp. The elastic contact of rough spheres. ASME Journal of Applied Mechanics, 1967, 34(1): 153-9. [20] 张学良, 温淑花. 基于接触分形理论的结合面切向接触刚度 分形模型[J]. 农业机械学报, 2002, 33(3): 91-93, 97. [21] 张学良, 温淑花, 徐格宁等. 结合部切向接触刚度分形模型 研究[J]. 应用力学学报, 2003, 20(1): 70-72. [22] 张学良, 黄玉美, 傅卫平等. 粗糙表面法向接触刚度的分形 模型[J]. 应用力学学报, 2000, 17(2): 31-35. [23] 张学良, 黄玉美, 韩颖. 基于接触分形理论的机械结合 向接触刚度模型[J]. 中国机械工程, 2000, 11(7): 727-729. [24] 张学良, 黄玉美, 温淑华. 结合面接触刚度分形模型研 农业机械学报, 2000, 31(4): 89-91. 张学良, 武美先等. 结合面法向接触刚度分形模 真[J]. 农业机械学报, 2009, 40(11): 197-202. [26] 温淑花,张学良, 文晓光等. 结合面切向接 立与仿真[J]. 农业机械学报, 2009, 40(12): 223- [27] 等. 基于分形理论的结合面静摩 因数改进模型[J]. 农业机械学报, 2012, 43(1): 213-218. Z. Q. Liu, J. Sun and W. D. Shen. Critical load analysis for a lay- ered half-space under sliding indentation. Tribology Transac- tions, 2006, 49(4): 513-525. [30] H. Zahouani, M. Assoul, R. Vargiolu, et al. The morphological tree transform of surface motifs. Incidence in tribology. Interna tional Journal of Machine Tools & Manufacture Design, search and Application, 2001, 41(13-14): 1961-1979. [31] W.-R. Chang, I. Etsion and D. B. Bogy. Adhesion model for tallic rough surfaces. ASME Journal of Tribology, 1988, 110(1): 50-56. [32] S.-M. Kim, J.-H. Ha, S.-H. Jeong, et al. Effect of joint condi- tions on the dynamic behavior of a grinding wheel spindle. ternational Journal of Machine Tools & Manufacture Design, Research and Application, 2001, 41(12): 1749-1761. [33] 黎明, 温诗铸. 纳米压痕技术理论基础[J]. 机械工程学 2003, 39(3): 142-145. [34] 盛选禹, 雒建斌,温诗铸. 基于分形接触的静摩擦系数预测 [J]. 中国机械工程, 1998, 9(7): 16-18. [35] 盛选禹, 雒建斌, 温诗铸. 相对湿度对几种摩擦副静摩擦 数的影响[J]. 摩擦学学报, 2001, 21(1): 42-46. [36] 盛选禹. 基于分形接触的湿度对静摩擦因数影响分析[J]. 荷 [37] W.-R. Chang, I. Etsioy. Static friction coefficient model of Tribology, [38] chanical Engineers, 1983, 197C: 53-59. [40] 杨桂通. 弹性力学引论[M]. 北京 大学出版社, 2004. [48] 童忠钫, 张杰. 加工中心立柱床身结合面动态特性研究及参 数识别[J]. 振动与冲击, 1992, 43(3): 13-19. 系统低阶高精度动力学模型 7(3): 8-15. 大学学报, 2000, 24(2): 82-85. 董立新等. 结合面法向动态特性参数研究 浩, 黄玉美. 机床导轨结合部的动态特性解析 Pcedings f te Royal . 模型的提出与发展[J]. 摩擦 . [15] A. Majumdar, B. Bhushan. Role of fractal geometry in rough- ness characterization and contact mechanics of surfaces. ASME Journal of Tribology, 1990, 112(2): 205-216. [16] B. Mandelbrot. How long is the coast of Britain? Statistical self- similarity and fractional dimension. Science, 1967, 156(3775): 636-638. [17] A. Majum C. L. Tien. Fractal characterization and simulation of rough surfaces. [18] A. Majumdar tact between rough surfaces. ASME Journal of Tribology 113(1): 1-11. 15 面法 究[J]. [25] 温淑花, 建立与仿 型 [5 触刚度分形模型建 227. 兰国生, 张学良, 丁红钦等. 基于分形理论的结合面改进接 触模型[J]. 农业机械学报, 2011, 42(10): 217-223, 229. [28] 兰国生, 张学良, 丁红钦 擦[ [29] - Re-of Xi’an University of Technology, 1996, 12(1): 1-5. [57] 张广鹏, 史文 me- 方法及其应用[J]. 机械工程学报, 2002, 38(10): 114-117. ] 马建辉, 张广鹏, 雷晓强. 机床 [58 In- their contact. roeoh Society of London, 1970, 316(1524): 97-121. 贺林, 朱均 报, [ 系19 泽学院学报, 2006, 28(5): 32-36. n and D. B. Bog for metallic rough surfaces. ASME Journal 1988, 110(1): 57-63. G. M. Hamilton. Explicit equations for the stresses beneath a sliding spherical contact. Proceedings of the Institution of Me- [39] G. M. Hamilton, L. E. Goodman. The stress field created by a circular sliding contact. ASME Journal of Applied Mechanics, 1966, 33(2): 371-376. 塑: 清华 [41] 李水根. 分形[M]. 北京: 高等教育出版社, 2006. [42] 陈辉, 胡元中, 王慧等. 粗糙表面分形特征的模拟及其表征 [J]. 机械工程学报, 2006, 42(9): 219-223. [43] 郁伯铭. 多孔介质输运性质的分形分析研究进展[J]. 力学进 展, 2003, 33(3): 333-346. [44] J. Pullen, J. B. P. Williamson. On the plastic contact of rough surfaces. Proceedings of the Royal Society of London, 1972, 327(1569): 159-173. [45] 王勖成, 邵敏. 有限单元法基本原理和数值方法[M]. 北京: 清华大学出版社, 1999. [46] 张杰, 童忠钫. 机床固定结合面动力学建模问题[J]. 振动与 冲击, 1994, 51(3): 15-22. [47] 张杰. 复杂机械结构结合面动力学建模及其参数识别方法的 研究[J]. 机械强度, 1996, 18(2): 1-5. [49] 张杰, 童忠 钫. 建立有阻尼振动 的方法[J]. 振动与冲击, 1993, 4 0] 吴志坚, 贾宝贤, 刘永红. 固定结合面参数的计算机模拟计 算[J]. 石油 [51] 吴筱坚. 机床固定结合面的一种建模方法[J]. 机械科学与技 术, 2002, 21(3): 439-441. ] 黄炎. 工程弹性力学[52 [M]. 北京: 清华大学出版社, 1982. [53] 王世军, 黄玉美, 赵金娟等. 机床导轨结合部的有限元模型 [J]. 中国机械工程, 2004, 15(18): 1634-1636. 54] 谢波. 滚动直线导轨副可动结合部的动力学建模[D]. 武汉: 华中科技大学硕士学位论文, 2007. [55] 黄玉美, 付卫平, [J]. 机械工程学报, 1993, 29(3): 74-78. [56] Y. M. Huang, W. P. Fu and J. X. Tong. A method of acquiring applied tangential damping parameters of joint surfaces. Journal 圆柱结合部的动态特性解析 方法[J]. 机床与液压, 2002, 5: 140-142. [59] D. J. Whitehouse, J. F. Archard. The properties of random sur- faces of significance in 60] 粗糙表面接触分形 学学报, 1996, 16(4): 375-384. 张铁山, 张友良, 阎辉. 成形板料表面的 接触分[61] 形几何模型 研究[J]. 中国机械工程, 2004, 15(11): 965-968. [62] 沈恒范. 概率论与数理统计教程[M]. 北京: 高等教育出版社, 95. [63] 张宇, 廖伯瑜. 机床结合部参数的有效识别方法[J]. 昆明理 工大学学报, 1998, 23(2): 36-41 [64] 程耀东, 李培玉. 机械振动学[M]. 杭州: 浙江大学出版社, 2006. 张志涌. 精通MATL[65] AB6.5 版[M]. 北京: 北京航空航天大学 出版社, 2003. [66] 周金萍, 王冉, 吴斌. MATLAB6实践与提高[M]. 北京: 中国 电力出版社, 2002. |