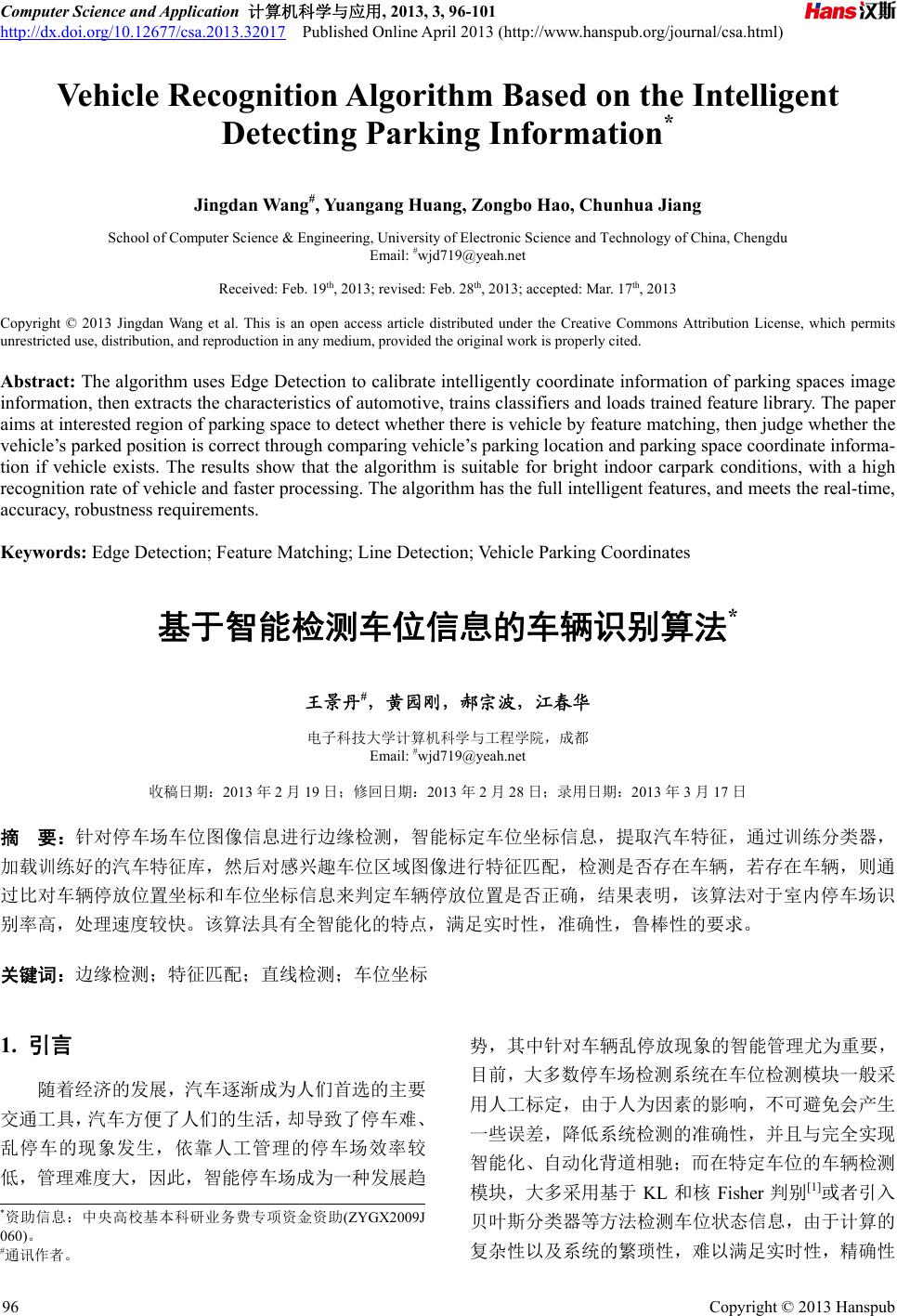
 Computer Science and Application 计算机科学与应用, 2013, 3, 96-101 http://dx.doi.org/10.12677/csa.2013.32017 Published Online April 2013 (http://www.hanspub.org/journal/csa.html) Vehicle Recognition Algorithm Based on the Intelligent Detecting Parking Information* Jingdan Wa ng#, Yuangang Huang, Zongbo Hao, Chunhua Jiang School of Computer Science & Engineering, University of Electronic Science and Technology of China, Chengdu Email: #wjd719@yeah.net Received: Feb. 19th, 2013; revised: Feb. 28th, 2013; accepted: Mar. 17th, 2013 Copyright © 2013 Jingdan Wang et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Abstract: The algorithm uses Edge Detection to calibrate intelligently coordinate information of parking spaces image information, then extracts the characteristics of automotive, trains classifiers and loads trained feature library. The paper aims at interested region of parking space to detect whether there is vehicle by feature matching, then judge whether the vehicle’s parked position is correct through comparing vehicle’s parking location and parking space coordinate informa- tion if vehicle exists. The results show that the algorithm is suitable for bright indoor carpark conditions, with a high recognition rate of vehicle and faster processing. The algo rithm has the full in telligent features, an d meets the real-time, accuracy, robustness requirements. Keywords: Edge Detection; Feat ure Matching; Li ne Det ection; Vehi cl e P arking Coordina t es 基于智能检测车位信息的车辆识别算法* 王景丹#,黄园刚,郝宗波,江春华 电子科技大学计算机科学与工程学院,成都 Email: #wjd719@yeah.net 收稿日期:2013 年2月19 日;修回日期:2013 年2月28 日;录用日期:2013 年3月17 日 摘 要:针对停车场车位图像信息进行边缘检测,智能标定车位坐标信息,提取汽车特征,通过训练分类器, 加载训练好的汽车特征库,然后对感兴趣车位区域图像进行特征匹配,检测是否存在车辆,若存在车辆,则通 过比对车辆停放位置坐标和车位坐标信息来判定车辆停放位置是否正确,结果表明,该算法对于室内停车场识 别率高,处理速度较快。该算法具有全智能化的特点,满足实时性,准确性,鲁棒性的要求。 关键词:边缘检测;特征匹配;直线检测;车位坐标 1. 引言 随着经济的发展,汽车逐渐成为人们首选的主要 交通工具,汽车方便了人们的生活,却导致了停车难、 乱停车的现象发生,依靠人工管理的停车场效率较 低,管理难度大,因此,智能停车场成为一种发展趋 势,其中针对车辆乱停放现象的智能管理尤为重要, 目前,大多数停车场检测系统在车位检测模块一般采 用人工标定,由于人为因素的影响,不可避免会产生 一些误差,降低系统检测的准确性,并且与完全实现 智能化、自动化背道相驰;而在特定车位的车辆检测 模块,大多采用基于 KL 和核 Fisher 判别[1]或者引入 贝叶斯分类器等方法检测车位状态信息,由于计算的 复杂性以及系统的繁琐性,难以满足实时性,精确性 *资助信息:中央高校基本科研业务费专项资金资助(ZYGX2009J 060)。 #通讯作者。 Copyright © 2013 Hanspub 96 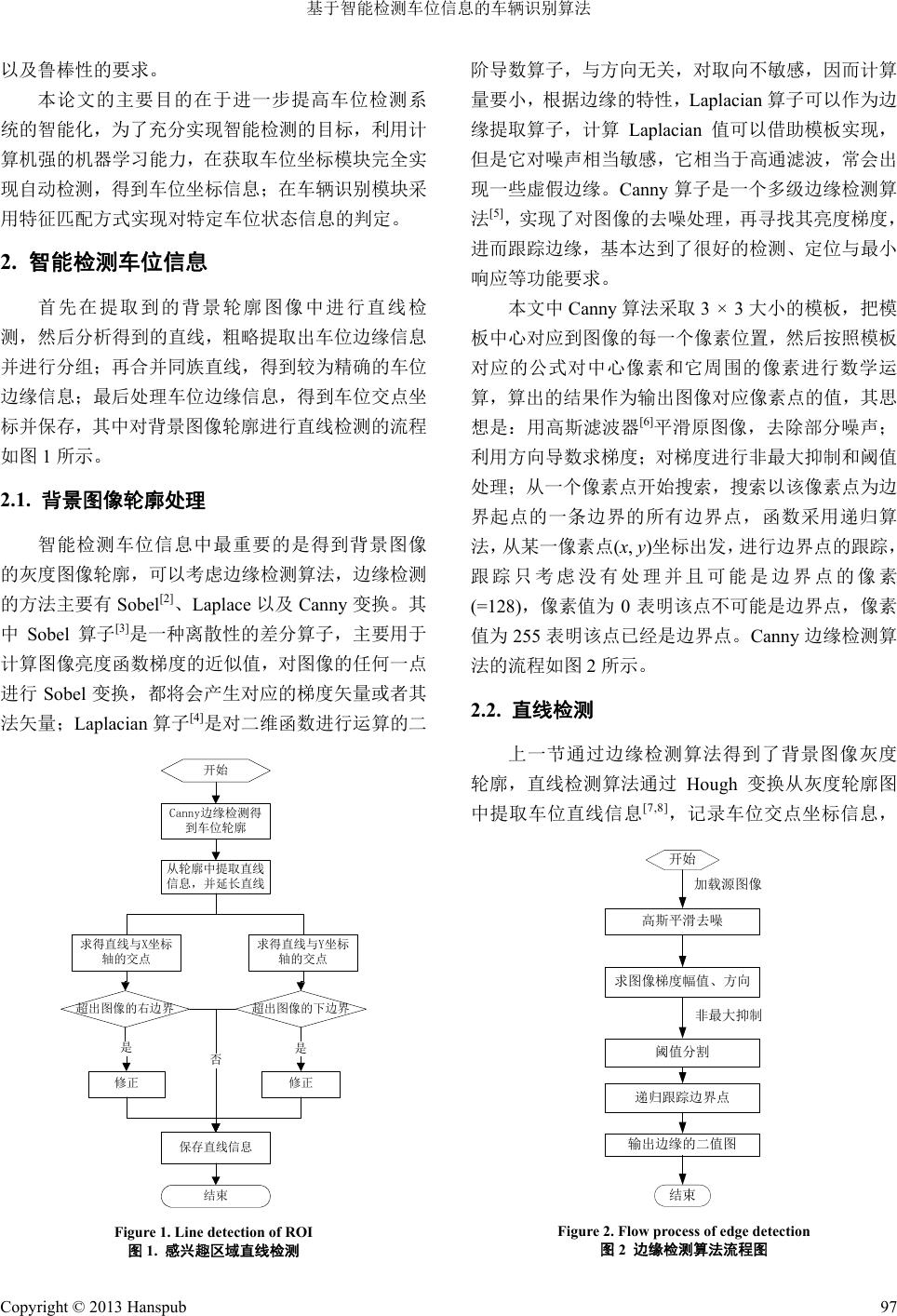 基于智能检测车位信息的车辆识别算法 以及鲁棒性的要求。 本论文的主要目的在于进一步提高车位检测系 统的智能化,为了充分实现智能检测的目标,利用计 算机强的机器学习能力,在获取车位坐标模块完全实 现自动检测,得到车位坐标信息;在车辆识别模块采 用特征匹配方式实现对特定车位状态信息的判定。 2. 智能检测车位信息 首先在提取到的背景轮廓图像中进行直线检 测,然后分析得到的直线,粗略提取出车位边缘信息 并进行分组;再合并同族直线,得到较为精确的车位 边缘信息;最后处理车位边缘信息,得到车位交点坐 标并保存,其中对背景图像轮廓进行直线检测的流程 如图 1所示。 2.1. 背景图像轮廓处理 智能检测车位信息中最重要的是得到背景图像 的灰度图像轮廓,可以考虑边缘检测算法,边缘检测 的方法主要有 Sobel[2]、Laplace 以及 Canny变换。其 中Sobel 算子[3]是一种离散性的差分算子,主要用于 计算图像亮度函数梯度的近似值,对图像的任何一点 进行 Sobel 变换,都将会产生对应的梯度矢量或者其 法矢量;Laplacian算子[4]是对二维函数进行运算的二 开始 从轮廓中提取直线 信息,并延长直线 求得直线与X坐标 轴的交点 超出图像的右边界 求得直线与Y坐标 轴的交点 超出图像的下边界 修正 是 修正 是 保存直线信息 否 结束 Canny边缘检测得 到车位轮廓 Figure 1. Line detection of ROI 图1. 感兴趣区域直线检测 阶导数算子,与方向无关,对取向不敏感,因而计算 量要小,根据边缘的特性,Laplacian 算子可以作为边 缘提取算子,计算 Laplacian 值可以借助模板实现, 但是它对噪声相当敏感,它相当于高通滤波,常会出 现一些虚假边缘。Canny 算子是一个多级边缘检测算 法[5],实现了对图像的去噪处理,再寻找其亮度梯度, 进而跟踪边缘,基本达到了很好的检测、定位与最小 响应等功能要求。 本文中 Canny 算法采取3 × 3大小的模板,把模 板中心对应到图像的每一个像素位置,然后按照模板 对应的公式对中心像素和它周围的像素进行数学运 算,算出的结果作为输出图像对应像素点的值,其思 想是:用高斯滤波器[6]平滑原图像,去除部分噪声; 利用方向导数求梯度;对梯度进行非最大抑制和阈值 处理;从一个像素点开始搜索,搜索以该像素点为边 界起点的一条边界的所有边界点,函数采用递归算 法,从某一像素点(x, y)坐标出发,进行边界点的跟踪, 跟踪只考虑没有处理并且可能是边界点的像素 (=128),像素值为 0表明该点不可能是边界点,像素 值为 255 表明该点已经是边界点。Canny边缘检测算 法的流程如图 2所示。 2.2. 直线检测 上一节通过边缘检测算法得到了背景图像灰度 轮廓,直线检测算法通过 Hough 变换从灰度轮廓图 中提取车位直线信息[7,8],记录车位交点坐标信息, 开始 高斯平滑去噪 求图像梯度幅值、方向 阈值分割 输出边缘的二值图 结束 递归跟踪边界点 加载源图像 非最大抑制 Figure 2. Flow process of edge detection 图2 边缘检测算法流程图 Copyright © 2013 Hanspub 97 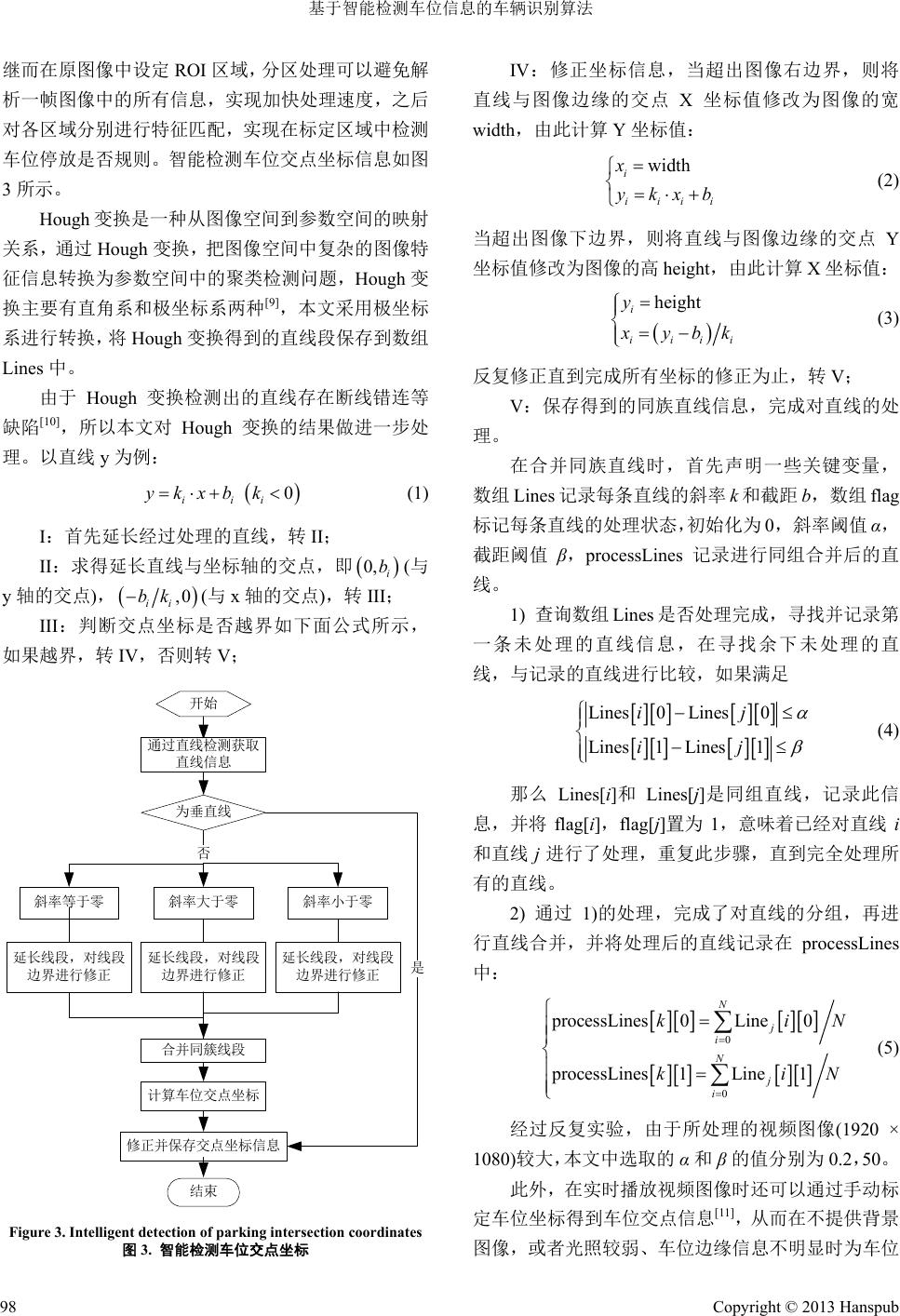 基于智能检测车位信息的车辆识别算法 继而在原图像中设定ROI 区域,分区处理可以避免解 析一帧图像中的所有信息,实现加快处理速度,之后 对各区域分别进行特征匹配,实现在标定区域中检测 车位停放是否规则。智能检测车位交点坐标信息如图 3所示。 Hough 变换是一种从图像空间到参数空间的映射 关系,通过 Hough 变换,把图像空间中复杂的图像特 征信息转换为参数空间中的聚类检测问题,Hough变 换主要有直角系和极坐标系两种[9],本文采用极坐标 系进行转换,将Hough 变换得到的直线段保存到数组 Lines 中。 由于 Hough 变换检测出的直线存在断线错连等 缺陷[10],所以本文对 Hough 变换的结果做进一步处 理。以直线y为例: 0 iii ykxbk (1) I:首先延长经过处理的直线,转 II; II:求得延长直线与坐标轴的交点,即 0, i b(与 y轴的交点), ,0 ii bk (与x轴的交点),转 III; III :判断交点坐标是否越界如下面公式所示, 如果越界,转IV ,否则转 V; 开始 通过直线检测获取 直线信息 斜率大于零斜率等于零 斜率小于零 为垂直线 否 延长线段,对线段 边界进行修正 延长线段,对线段 边界进行修正 合并同簇线段 计算车位交点坐标 修正并保存交点坐标信息 是 延长线段,对线段 边界进行修正 结束 Figure 3. Intelligent detection of parking intersection coordinates 图3. 智能检测车位交点坐标 IV:修正坐标信息,当超出图像右边界,则将 直线与图像边缘的交点 X坐标值修改为图像的宽 width,由此计算 Y坐标值: width i iii x ykxb i (2) 当超出图像下边界,则将直线与图像边缘的交点 Y 坐标值修改为图像的高height,由此计算X坐标值: height i iii y i x ybk (3) 反复修正直到完成所有坐标的修正为止,转V; V:保存得到的同族直线信息 ,完成 对直线 的处 理。 在合并同族直线时,首先声明一些关键变量, 数组 Lines 记录每条直线的斜率 k和截距 b,数组 flag 标记每条直线的处理状态,初始化为0,斜率阈值 α, 截距阈值 β,processLines 记录进行同组合并后的直 线。 1) 查询数组 Lines 是否处理完成,寻找并记录第 一条未处理的直线信息,在寻找余下未处理的直 线,与记录的直线进行比较,如果满足 Lines0 Lines0 Lines1 Lines1 ij ij (4) 那么 Lines[i]和Lines[j]是同组直线,记录此信 息,并将 flag[i],flag[j]置为 1,意味着已经对直线 i 和直线 j进行了处理,重复此步骤,直到完全处理所 有的直线。 2) 通过 1)的处理,完成了对直线的分组,再进 行直线合并,并将处理后的直线记录在processLines 中: 0 0 processLines 0Line0 processLines 1Line1 N j i N j i ki ki N N (5) 经过反复实验,由于所处理的视频图像(1920 × 1080)较大,本文中选取的 α和β的值分别为0.2,50。 此外,在实时播放视频图像时还可以通过手动标 定车位坐标得到车位交点信息[11],从而在不提供背景 图像,或者光照较弱、车位边缘信息不明显时为车位 Copyright © 2013 Hanspub 98 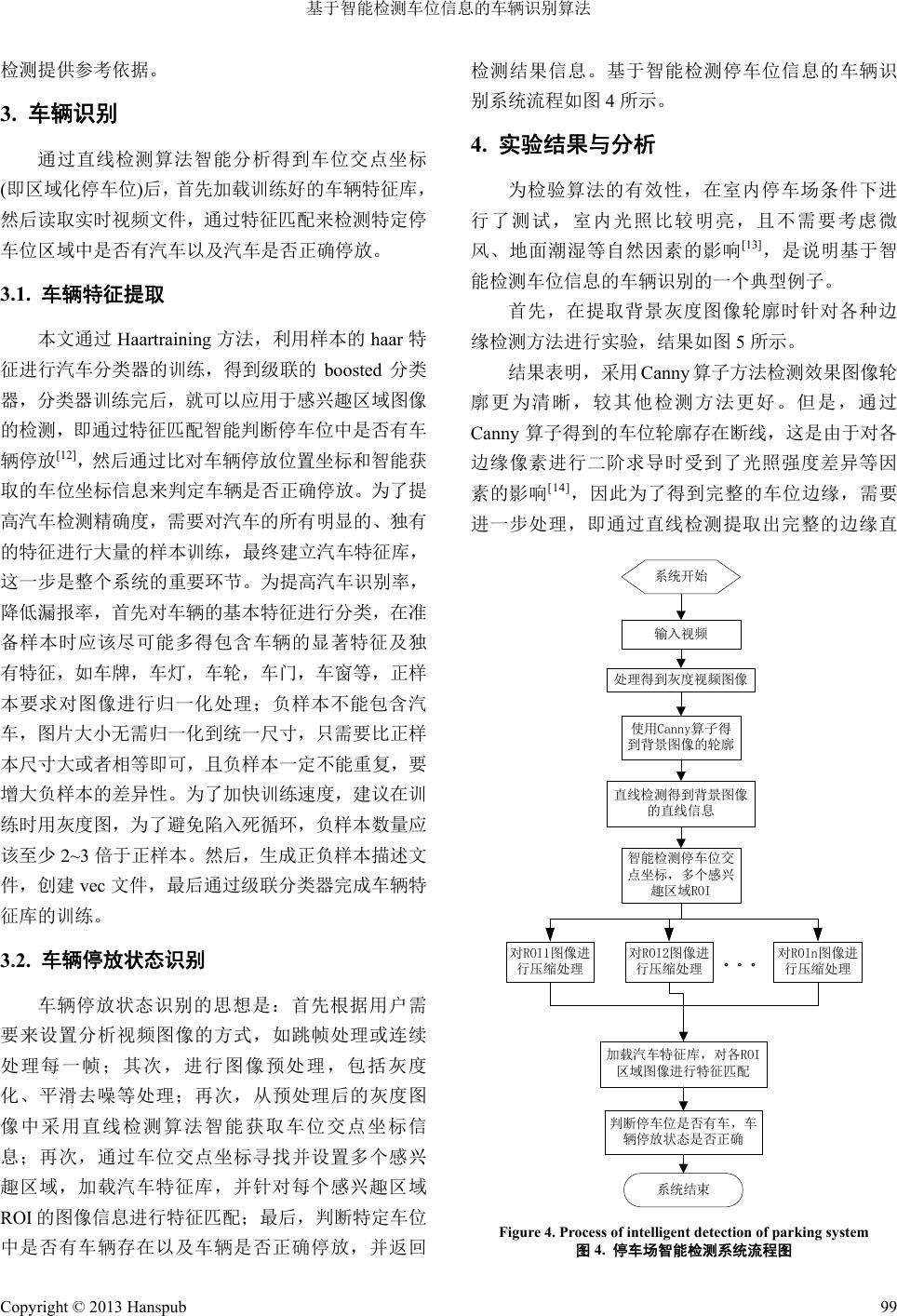 基于智能检测车位信息的车辆识别算法 检测提供参考依据。 3. 车辆识别 通过直线检测算法智能分析得到车位交点坐标 (即区域化停车位)后,首先加载训练好的车辆特征库, 然后读取实时视频文件,通过特征匹配来检测特定停 车位区域中是否有汽车以及汽车是否正确停放。 3.1. 车辆特征提取 本文通过 Haartraining 方法,利用样本的 haar 特 征进行汽车分类器的训练,得到级联的 boosted 分类 器,分类器训练完后,就可以应用于感兴趣区域图像 的检测,即通过特征匹配智能判断停车位中是否有车 辆停放[12],然后通过比对车辆停放位置坐标和智能获 取的车位坐标信息来判定车辆是否正确停放。为了提 高汽车检测精确度,需要对汽车的所有明显的、独有 的特征进行大量的样本训练,最终建立汽车特征库, 这一步是整个系统的重要环节。为提高汽车识别率, 降低漏报率,首先对车辆的基本特征进行分类,在准 备样本时应该尽可能多得包含车辆的显著特征及独 有特征,如车牌,车灯,车轮,车门,车窗等,正样 本要求对图像进行归一化处理;负样本不能包含汽 车,图片大小无需归一化到统一尺寸,只需要比正样 本尺寸大或者相等即可,且负样本一定不能重复,要 增大负样本的差异性。为了加快训练速度,建议在训 练时用灰度图,为了避免陷入死循环,负样本数量应 该至少 2~3 倍于正样本。然后,生成正负样本描述文 件,创建 vec文件,最后通过级联分类器完成车辆特 征库的训练。 3.2. 车辆停放状态识别 车辆停放状态识别的思想是:首先根据用户需 要来设置分析视频图像的方式,如跳帧处理或连续 处理每一帧;其次,进行图像预处理,包括灰度 化、平滑去噪等处理;再次,从预处理后的灰度图 像中采用直线检测算法智能获取车位交点坐标信 息;再次,通过车位交点坐标寻找并设置多个感兴 趣区域,加载汽车特征库,并针对每个感兴趣区域 ROI 的图像信息进行特征匹配;最后,判断特定车位 中是否有车辆存在以及车辆是否正确停放,并返回 检测结果信息。基于智能检测停车位信息的车辆识 别系统流程如图 4所示。 4. 实验结果与分析 为检验算法的有效性,在室内停车场条件下进 行了测试,室内光照比较明亮,且不需要考虑微 风、地面潮湿等自然因素的影响[13],是说明基于智 能检测车位信息的车辆识别的一个典型例子。 首先,在提取背景灰度图像轮廓时针对各种边 缘检测方法进行实验,结果如图5所示。 结果表明,采用Canny算子方法检测效果图像轮 廓更为清晰,较其他检测方法更好。但是,通过 Canny 算子得到的车位轮廓存在断线,这是由于对各 边缘像素进行二阶求导时受到了光照强度差异等因 素的影响[14],因此为了得到完整的车位边缘,需要 进一步处理,即通过直线检测提取出完整的边缘直 输入视频 系统结束 系统开始 加载汽车特征库,对各ROI 区域图像进行特征匹配 判断停车位是否有车,车 辆停放状态是否正确 处理得到灰度视频图像 使用Canny算子得 到背景图像的轮廓 直线检测得到背景图像 的直线信息 智能检测停车位交 点坐标,多个感兴 趣区域ROI 对ROI1图像进 行压缩处理 对ROI2图像进 行压缩处理 对ROIn图像进 行压缩处理 。。。 Figure 4. Process of intelligent detection of parking system 图4. 停车场智能检测系统流程图 Copyright © 2013 Hanspub 99  基于智能检测车位信息的车辆识别算法 线,然后延长各边缘线,并消除垂直线等干扰因 素,结果如图6(a)示。 图示表明,经过处理后得到的车位边缘直线检 测效果较好,且比较精确,但是车位的边缘线是一 簇直线,且这些直线的斜率以及截取较为接近,因 此合并同簇直线,求得车位交点坐标,如图6(b)所 示,图示表明,在空车位的背景图像中,通过合并 同簇直线得到的相交直线交点坐标较精确。 最后,对基于该算法的停车场车辆识别系统进 行测试,实验效果如图 7所示。 得到的实验结果数据如表 1所示。 Figure 5. Comparison of canny, Laplacian and Sobel 图5. Canny、Laplacian、Sobel 边缘检测效果对比图 (a) (b) Figure 6. Line detection for parking coordinate information: (a) Results of line detection; (b) Coordinate of parking space 图6. 直线检测获取车位坐标信息:(a) 直线检测结果图;(b) 车位 坐标 结果表明,该算法在观测角度比较好的环境下 的误判率较低,并且能抑制部分阴影噪声。此外, 系统对实时视频文件处理速度快,达到了实时性, 准确性,鲁棒性的要求。 5. 结语 在深入研究车辆识别算法的基础上,针对目前 仍然存在的不足给出了相应的解决办法,提出了完 全智能检测车位信息的车辆识别算法,通过机器学 习,智能检测出车位坐标信息;引入特征匹配,实 现了车辆识别的全智能化。结果表明,该算法准确 率高,误报率低,在鲁棒性、实时性、智能化方面 是可行的,完全能应用到实际车位监控和管理系统 中。 (a) (b) (c) Figure 7. Results of vehicle detection: (a) No car; (b) Car coming; (c) Car leaving 图7. 车辆检测结果:(a) 车位无车;(b) 有车入库;(c) 有车已离开 Table 1. Data of experimental results 表1. 实验结果数据表 车辆分类 测试视频数 误报率 漏报率 有车 200 0.5% 0 无车 150 1.5% 1% Copyright © 2013 Hanspub 100  基于智能检测车位信息的车辆识别算法 Copyright © 2013 Hanspub 101 文的车辆智能识别算法主要适用于光照平 稳的 参考文献 (References) . 基于Fisher变化的多尺度 国信息科 Canny算子边缘检测算法[J]. 现 Canny 算子边缘检测[J]. 变换直线段检测方法 换的道路边缘提取[J]. 像素块的边缘直线检测算法 [J]. 长春 recognition [D]. 中国海洋 . Motion vehicle recognition and tracking in the 本论 室内停车场,因为室外环境下的光照变化会影响 停车场内车位线标志,进而影响边缘检测的效果,同 时,由于摄像头的不同导致采集的视频图像分辨率不 同,分辨率越低,车辆识别效果就会降低,智能车辆 检测对分辨率低、光照变化情况下的准确率提出了挑 战,下一步的研究目标是考虑如何将其应用于复杂 的室外环境中。此外,本论文提出的算法是通过停车 场广播警告车辆乱停放现象,而未提取车牌号,下一 步的工作中还需加入车牌号的识别,实现直接对车辆 乱停放的车主进行针对性提醒,或警告。 [1] 刘怡光, 游志胜, 曹丽萍, 蒋欣荣图 co 像识别方法及其车形识别应用[J]. 电子与信息学报, 2003, 25 (12): 1603-1611. [2] W. H. Wang. Reach on Sobel operator for vehicle intelligence. International Joint Conference on Artificial Intelligence (IEEE), Hainan Island, 25-26 April 2009: 448-451. [3] 吴国伟, 谢金法, 郭志强. 基于Sobel算子的车辆轮廓边缘检 测算法[J]. 河南科技大学学报, 2009, 30(6): 38-41. [4] 常娜. 图像处理中的边缘检测算法研究综述[J]. 中 技, 2011, 4: 130-131, 149. [5] 宗露艳, 吴陈. 一种改进的 代电子技术, 2011, 34(4): 104-106. [6] 陈宏希. 基于边缘保持平滑滤波的 兰州交通大学学报, 2006, 25(1): 86-90. [7] 陈俊杰, 吕剑, 降爱莲. 改进的 Hough [J]. 微计算机信息, 2010, 21: 211-213. [8] 乔洁, 李京华, 杨志荣. 基于 Hough 变 交通与计算机, 2008, 26(1). [9] 李安平, 刘文奇, 蔡光程. 基于 [J]. 计算机应用于软件, 2008, 25(2): 237-238, 244. [10] 高晓波, 姜涛. 基于边缘检测的 OMR图像倾斜矫正 理工大学学报(自然科学版), 2011, 34(1): 100-103. [11] Y. R. Du, C. Y. Liu and W. Shi. A real-time vehicle method based on video sequence images. The 9th International Conference on Electronic Measurement & Instruments, Beijing, 16-19 August 2009: 4-400-4-402. [12] 王蕾. 基于视频图像处理的车辆识别技术研究 大学, 2009. [13] W. H. Wang mplex environment. International Seminar on Future Informa- tion Technology and Management Engineering, Leicestershire, 20 November 2008: 278-282. [14] W. H. Wang. A study on contour feature algorithm for vehicle type recognition. International Joint Conference on Artificial In- telligence, Hainan Island, 25-26 April 2009: 452-455. |